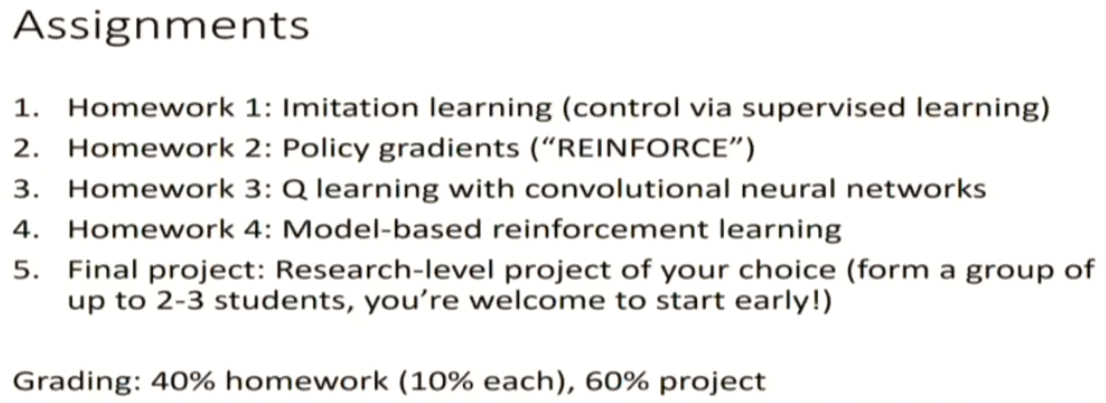
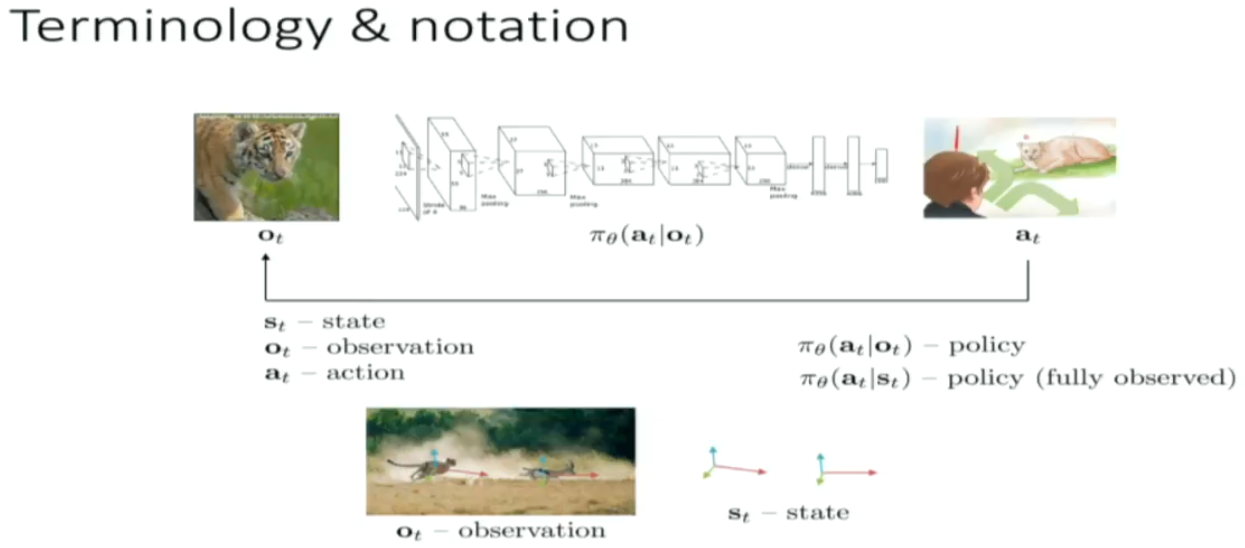
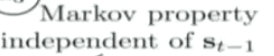
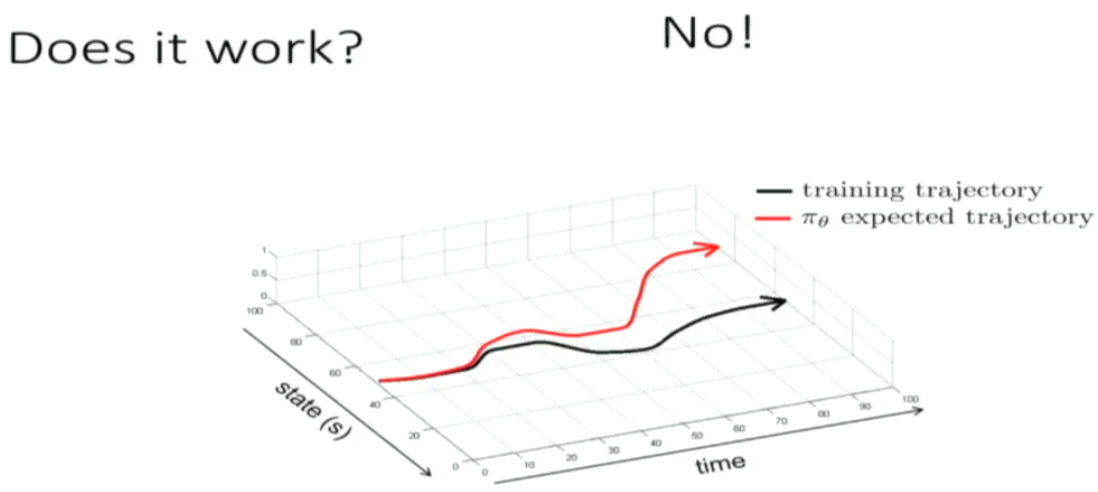
CS294-112 深度强化学习 秋季学期(伯克利)NO.1 Introduction NO.2 Supervised learning and imitation
前面弄错了,应该看2017的秋季课,结果看了春季课了。








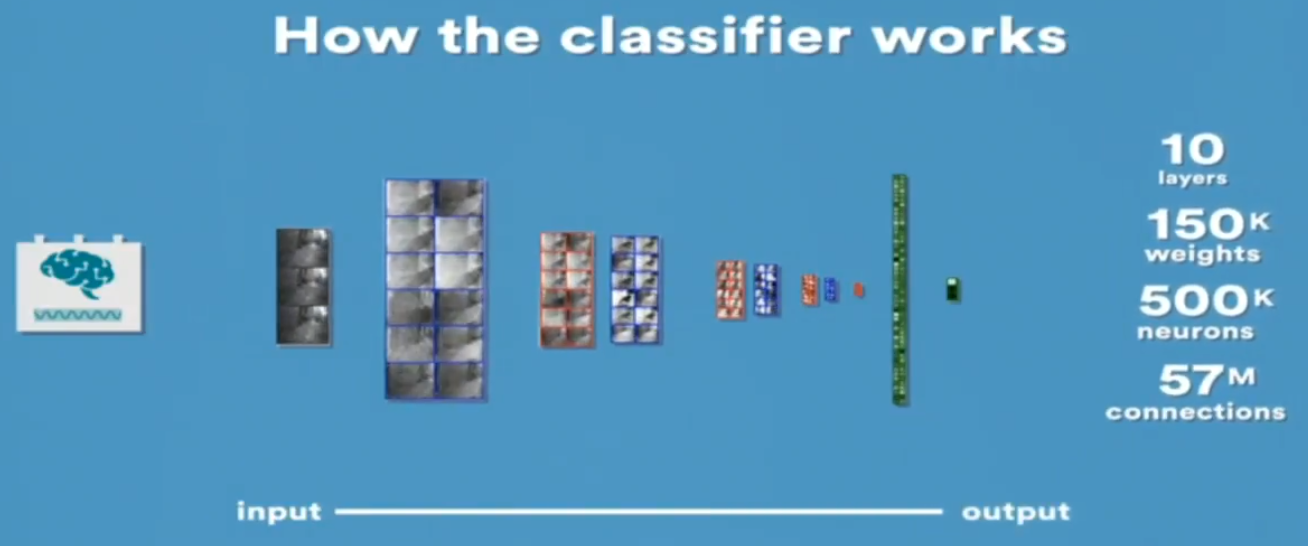
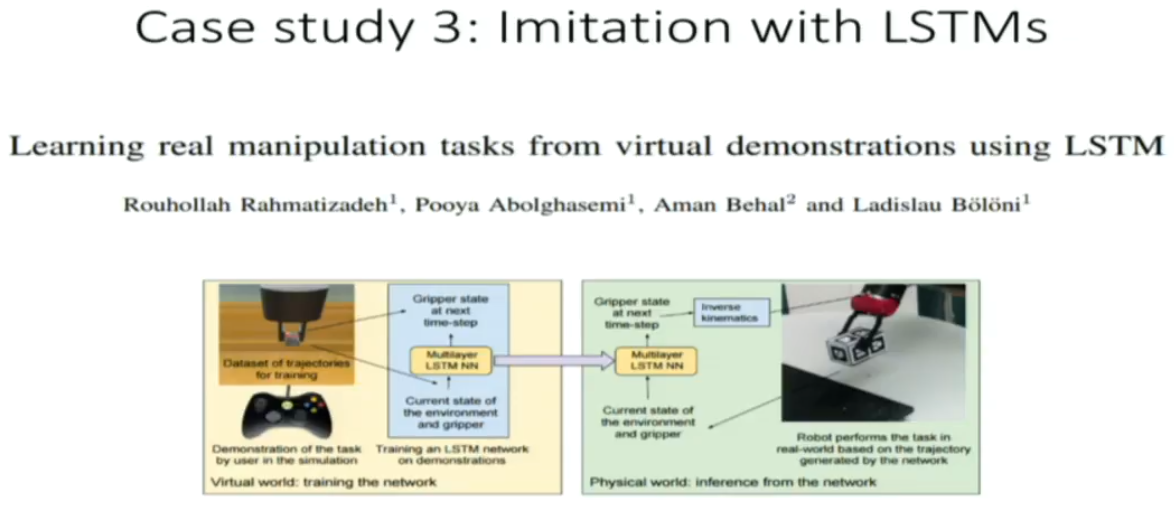
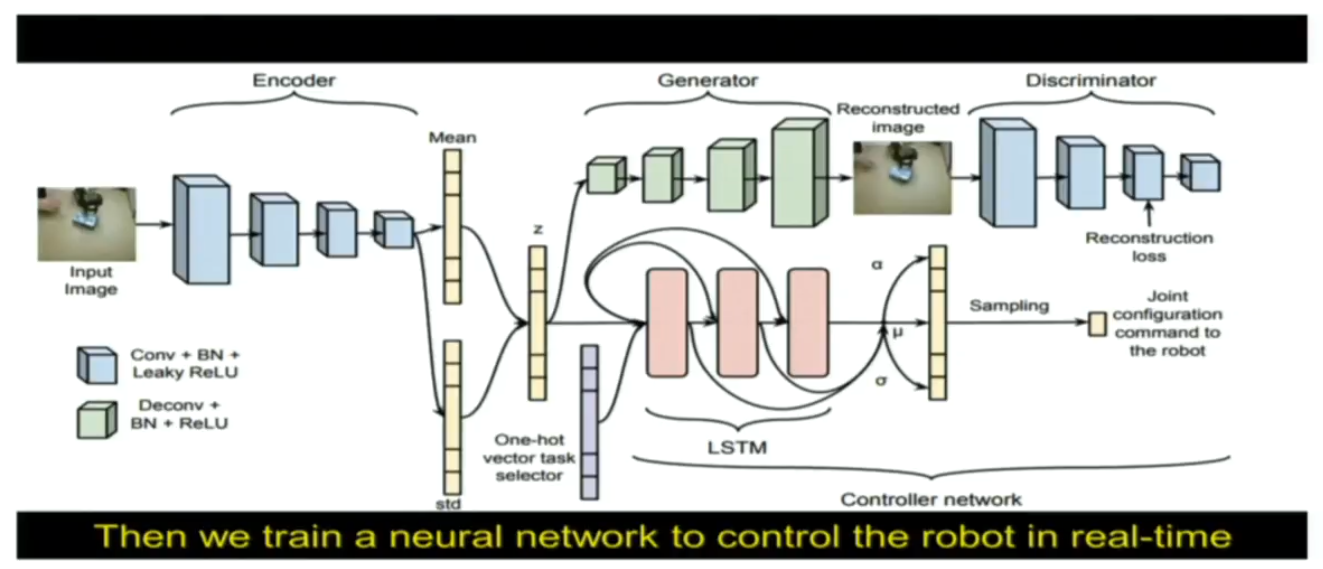
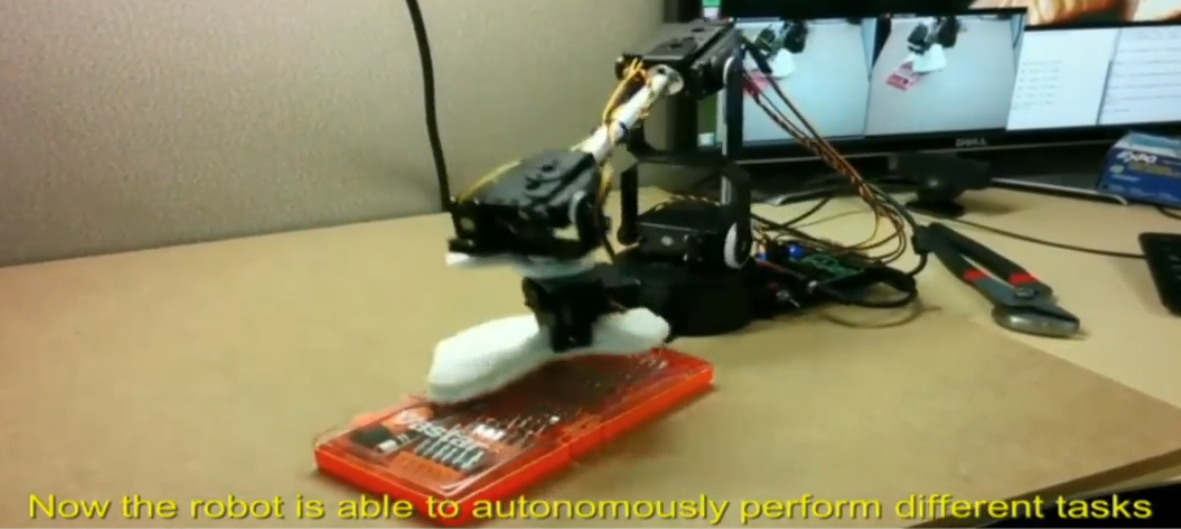
 neural network control a virtual robot, by imitating human motion
neural network control a virtual robot, by imitating human motion
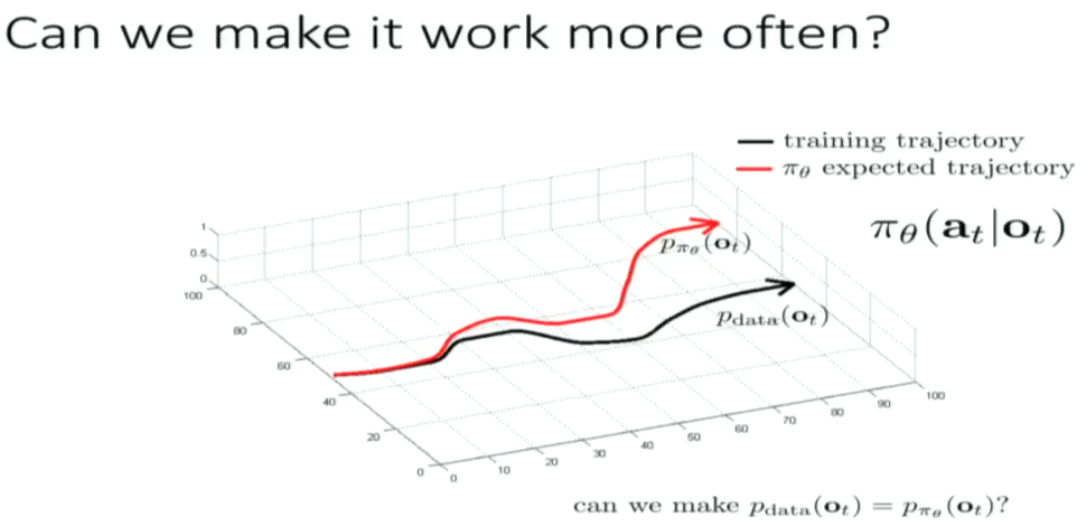
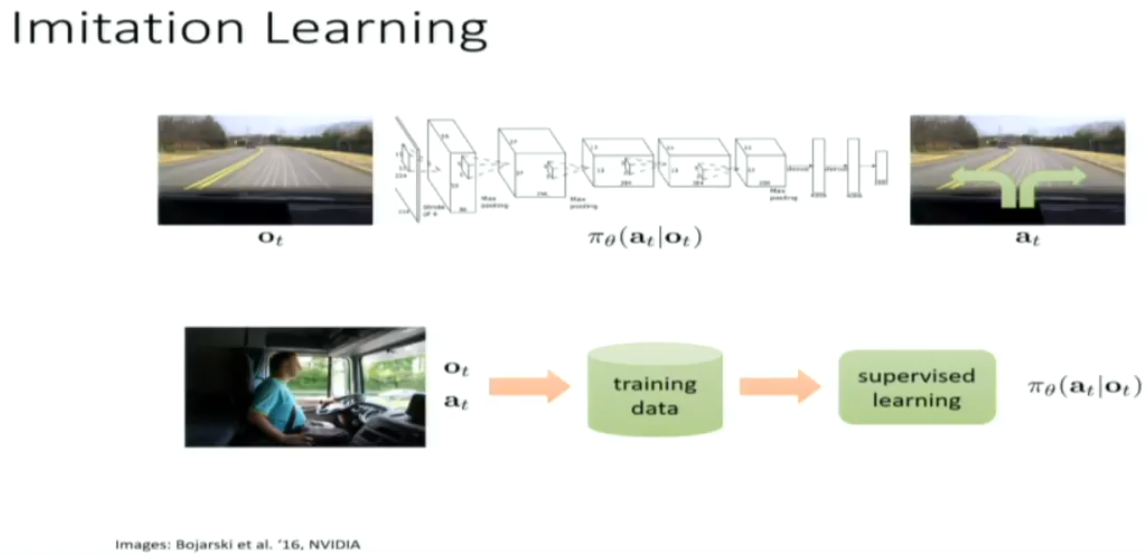
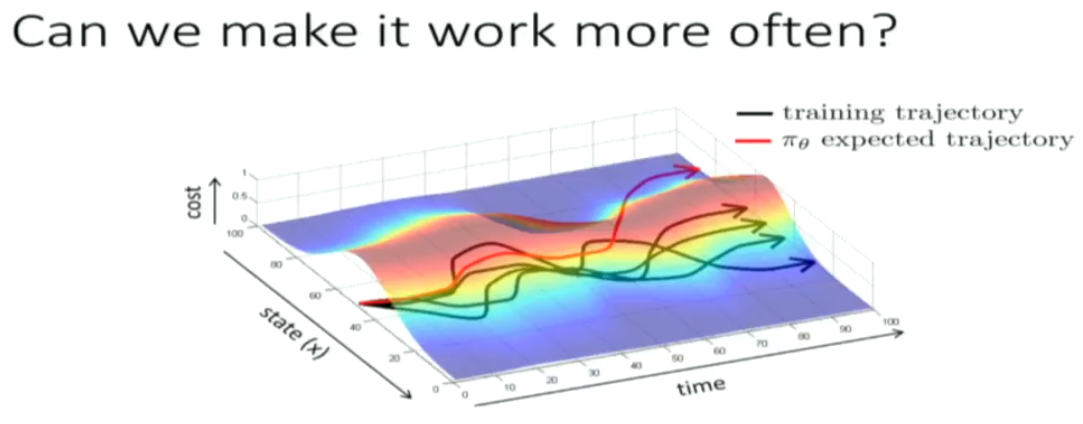
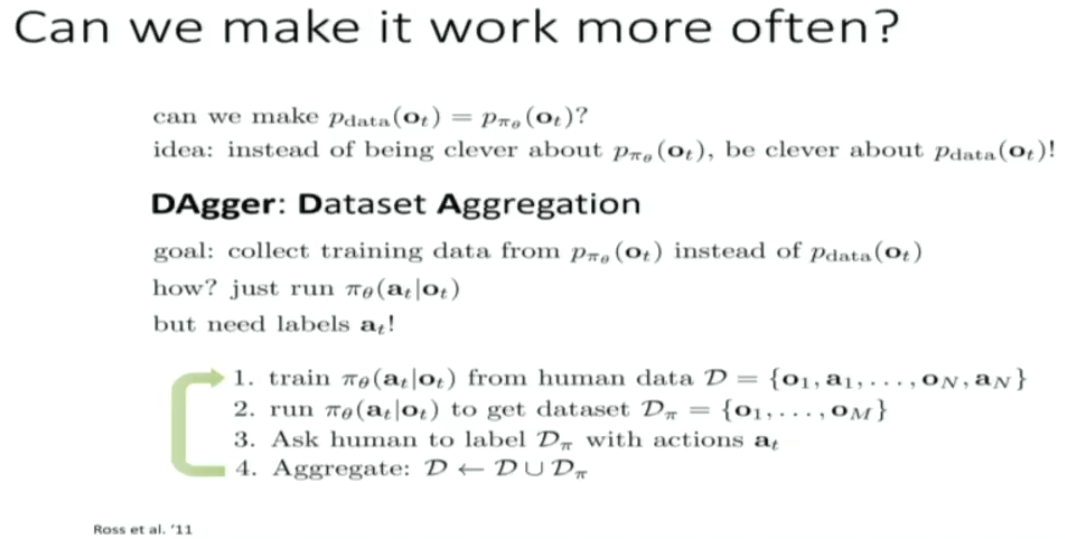
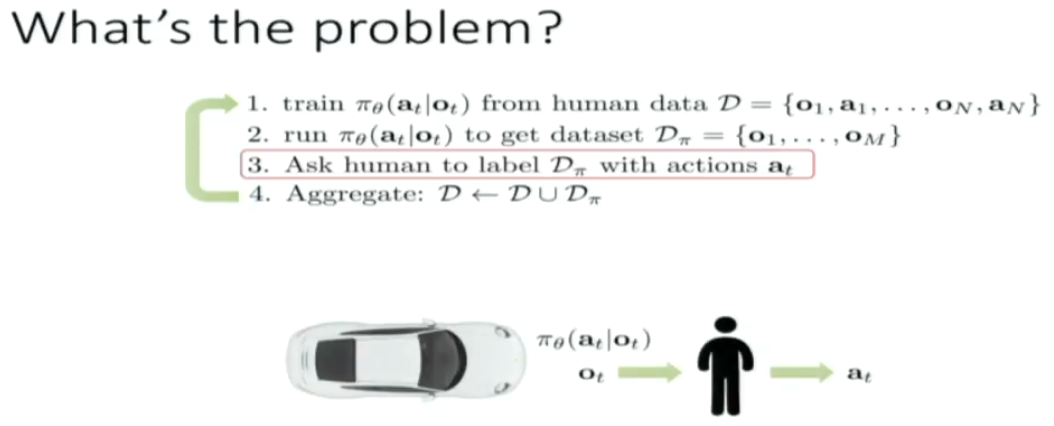
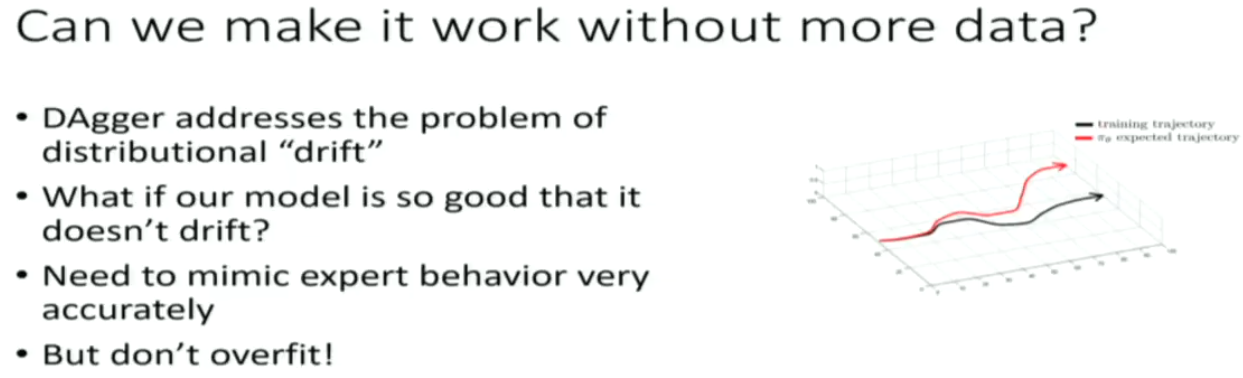
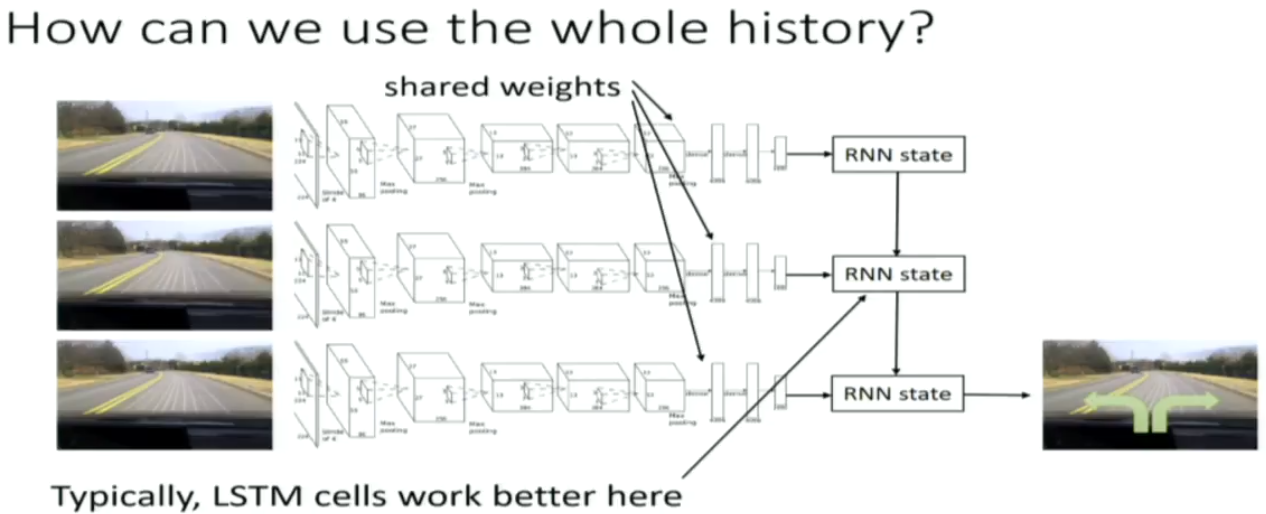
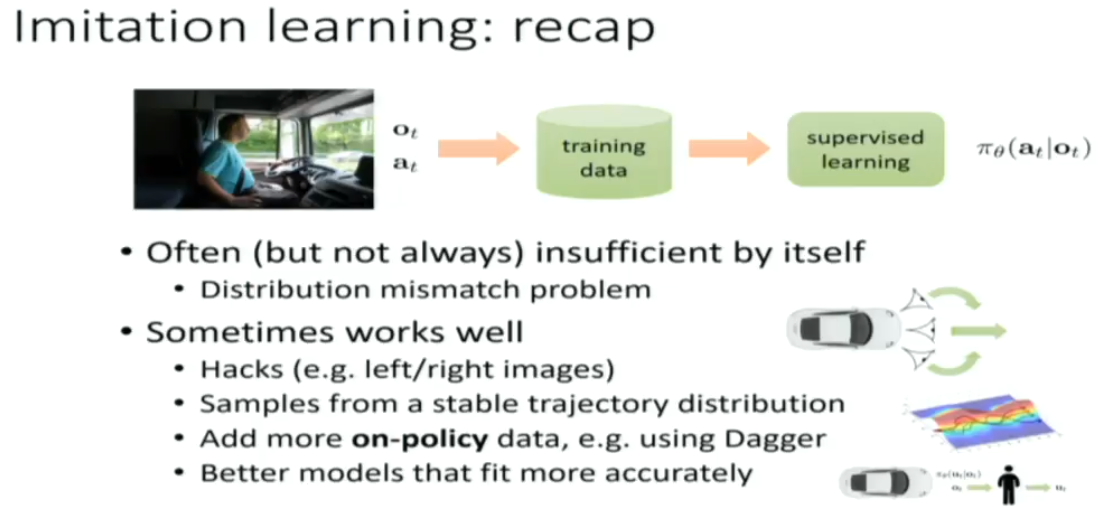
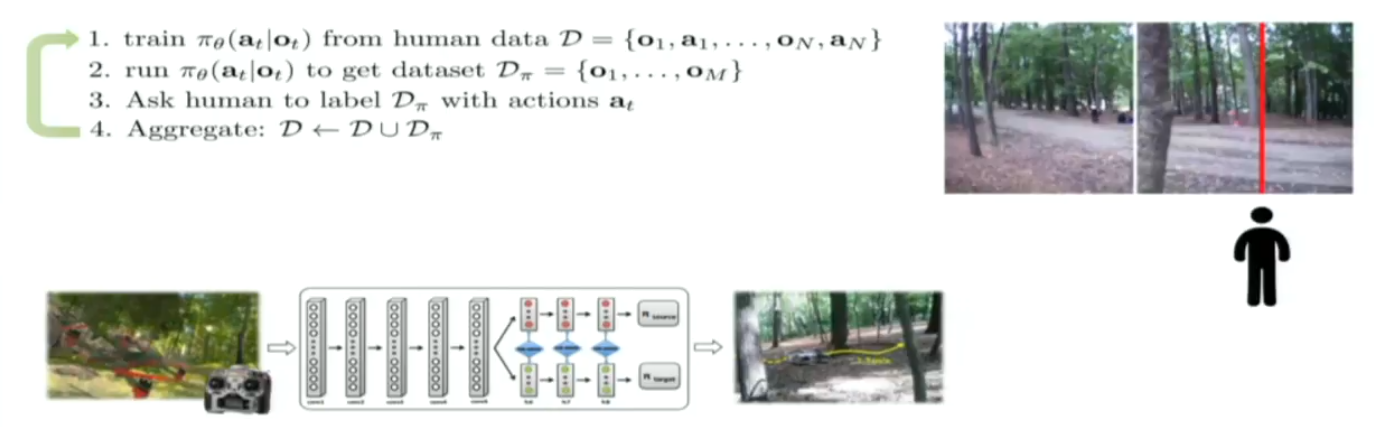
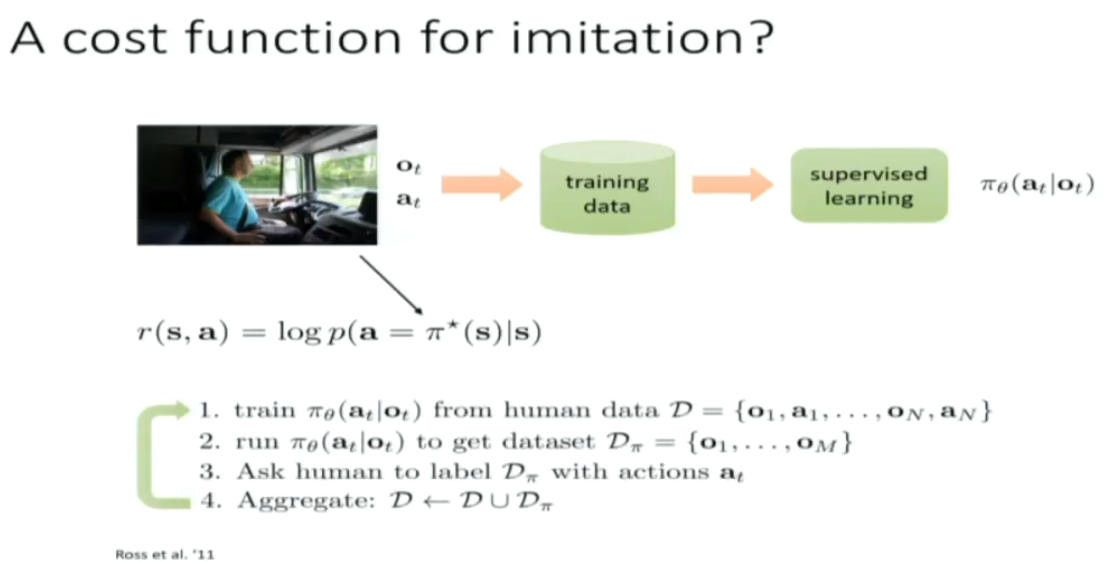
Domain shift cause the failure of supervised learning in imitation learning.

human expert said "turn left!!!" (step 3)

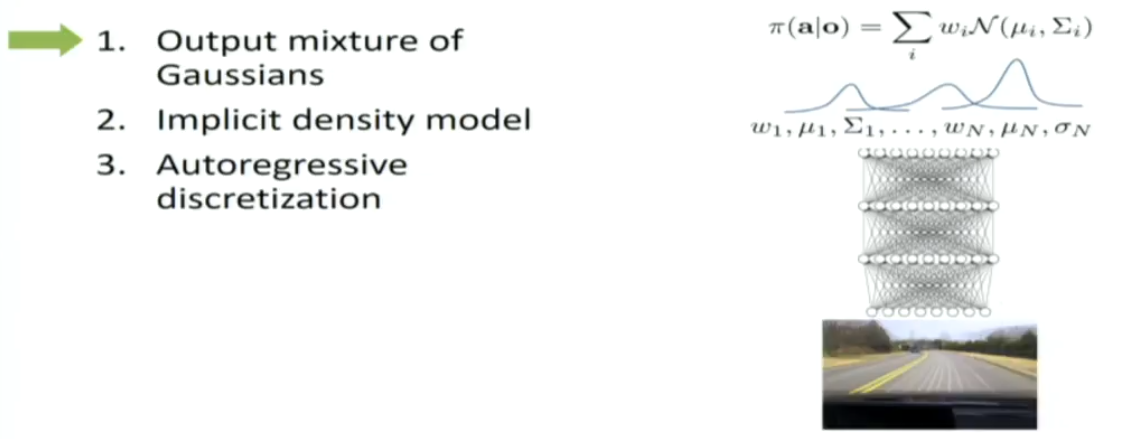
we don't want the average of the two expected behaviors. when the actions are discrete, the model works well.
 however, this is the gaussian output of continuous actions
however, this is the gaussian output of continuous actions
solution:
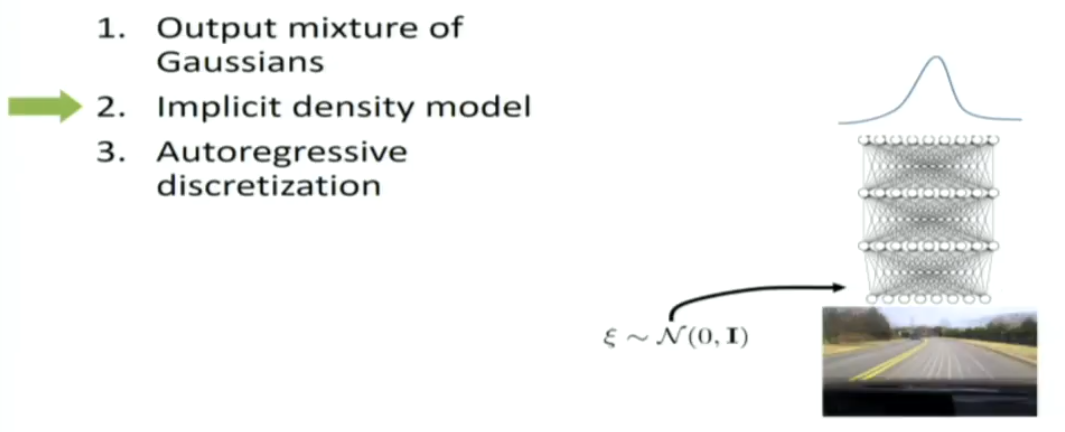
add a noise input here.
the defect is implicit density model is harder to train.
recommend to look at VAE and GAN and stan??? variational gradient descent, which are three methods to train implicit density models
upside: capable to mimic any form of function
downside: much more complex to implement
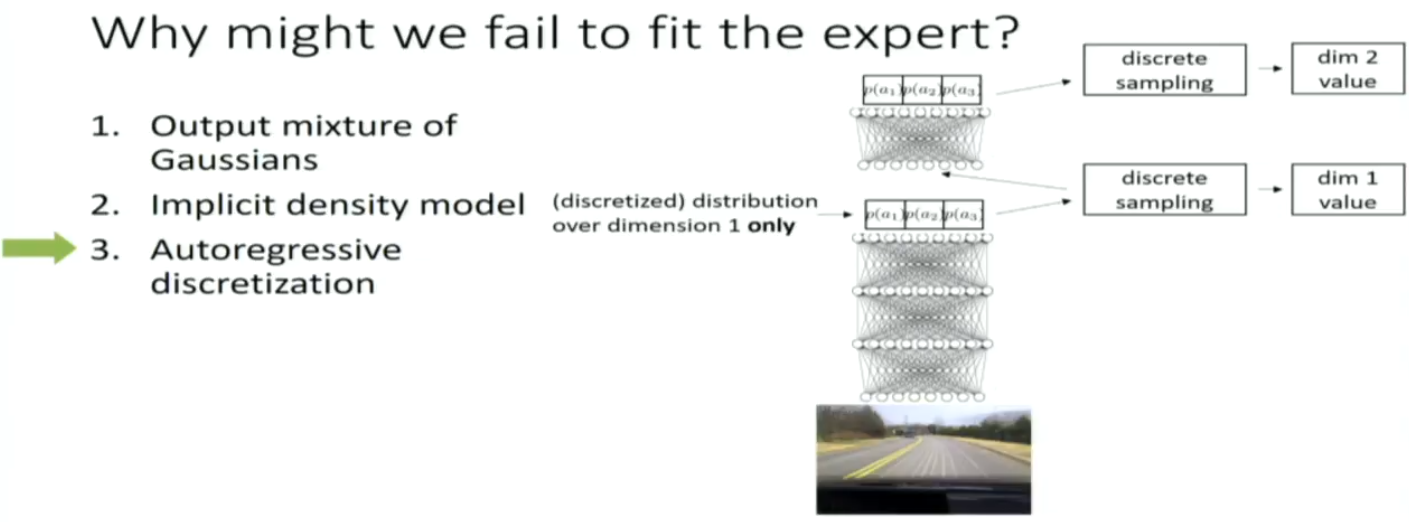
the second net is conditionally sampling from the first net
It's time for case study
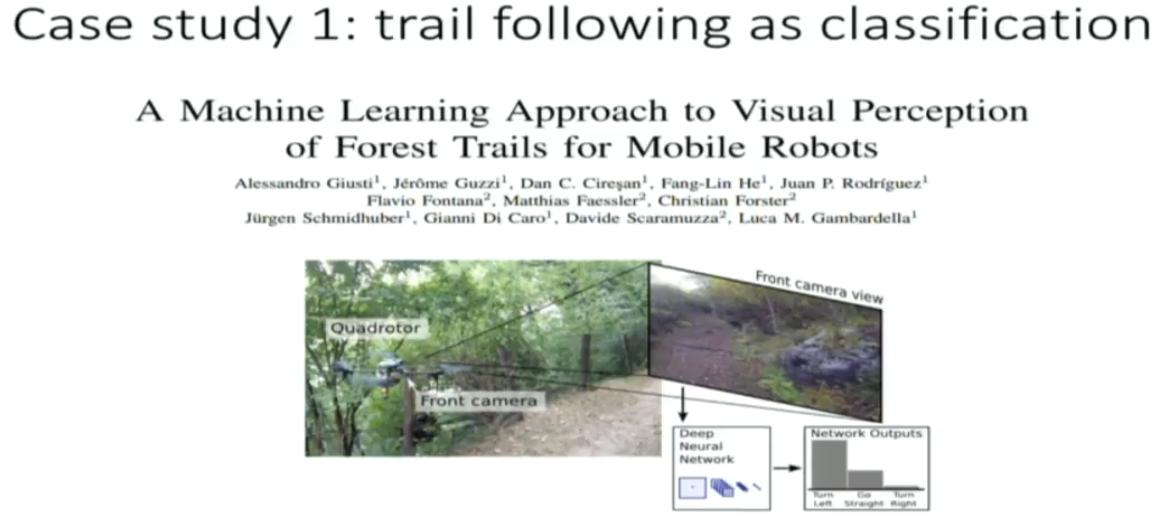

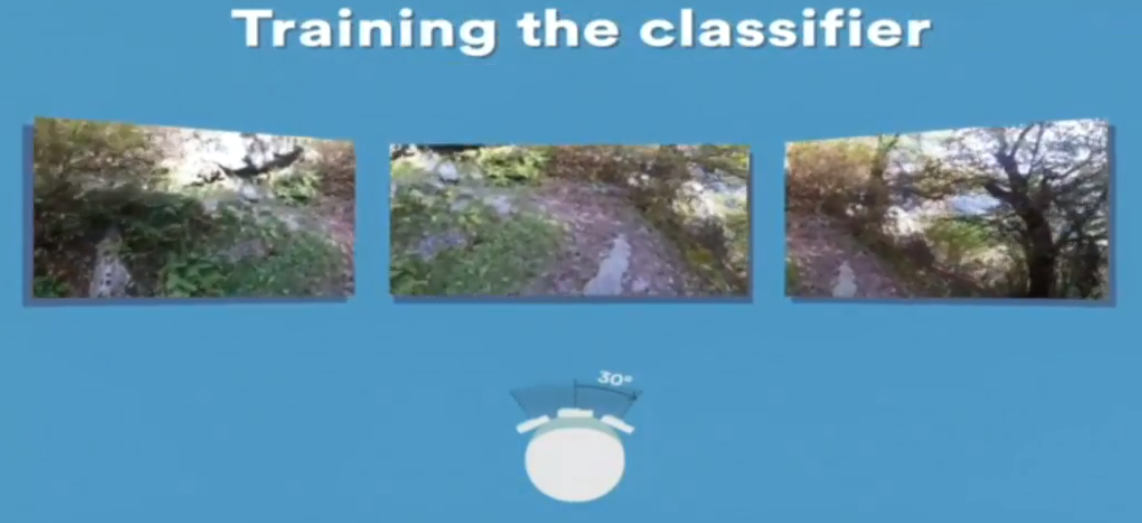
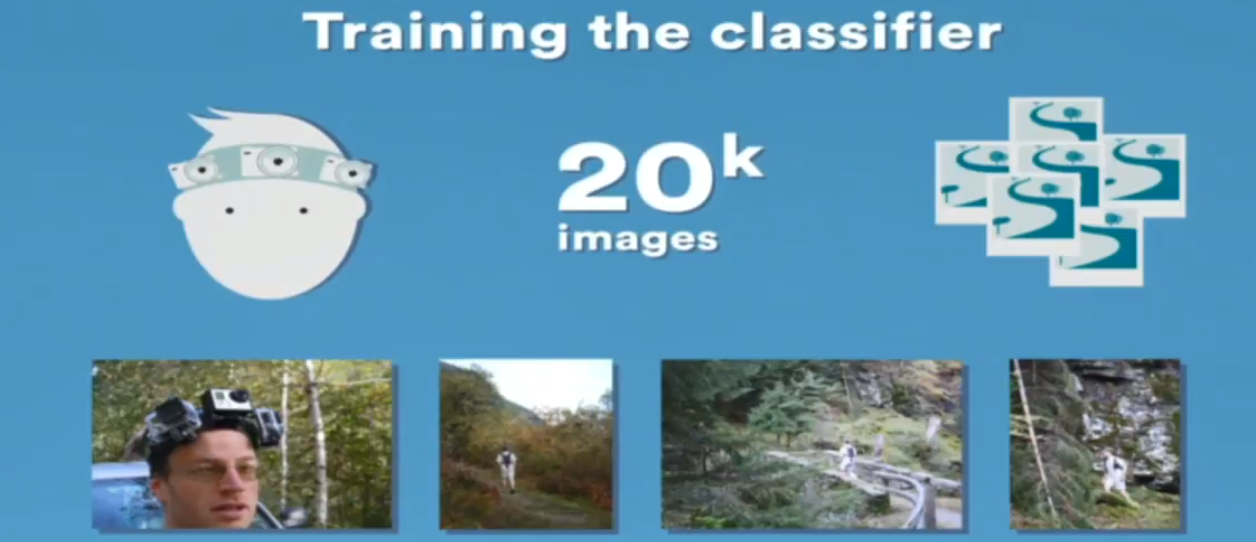
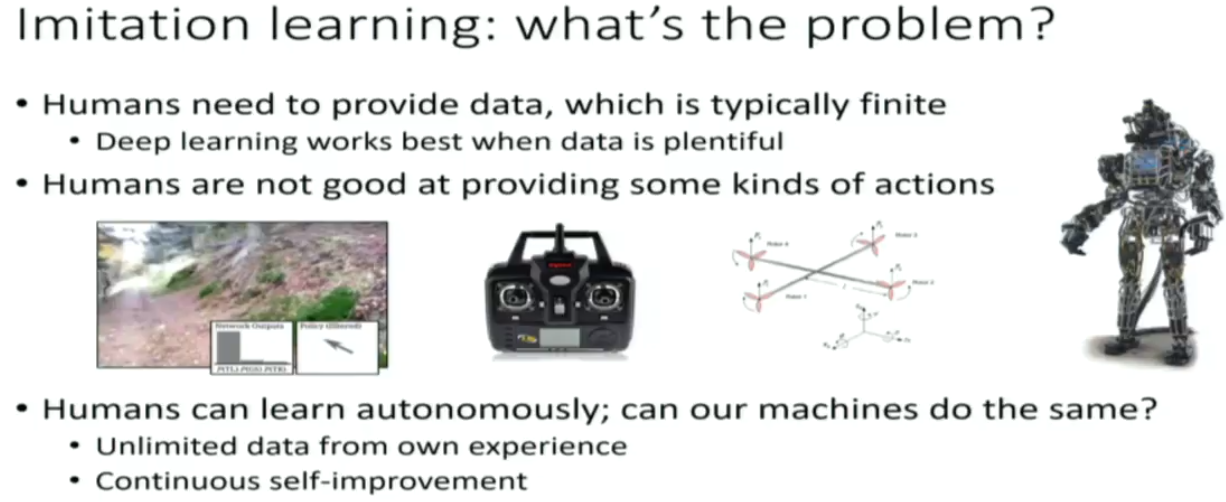
this is a human with three go-pro on his head...
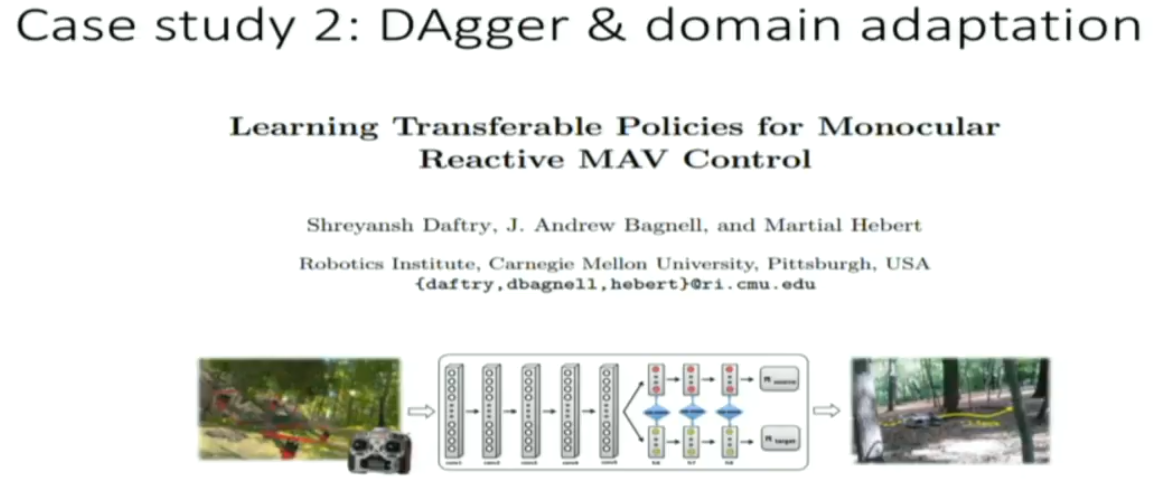

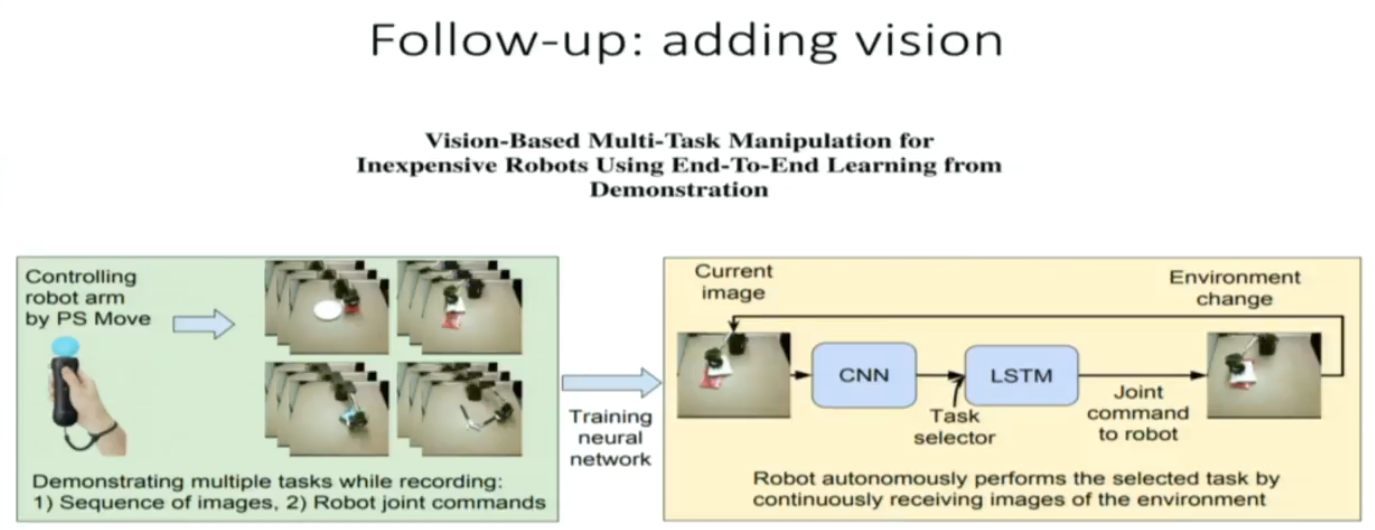
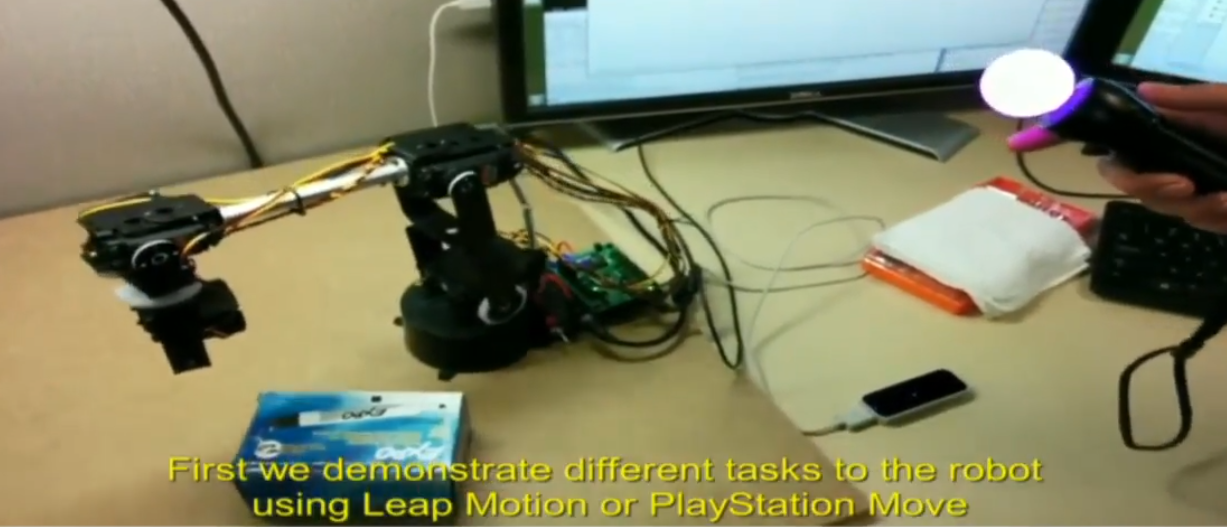
robot: 300 bucks
game control: 100 bucks
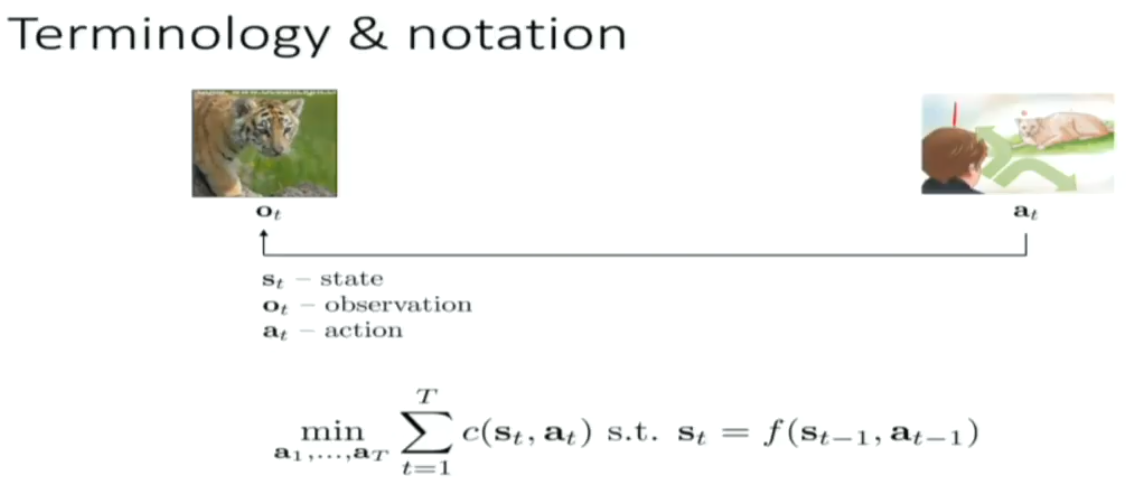
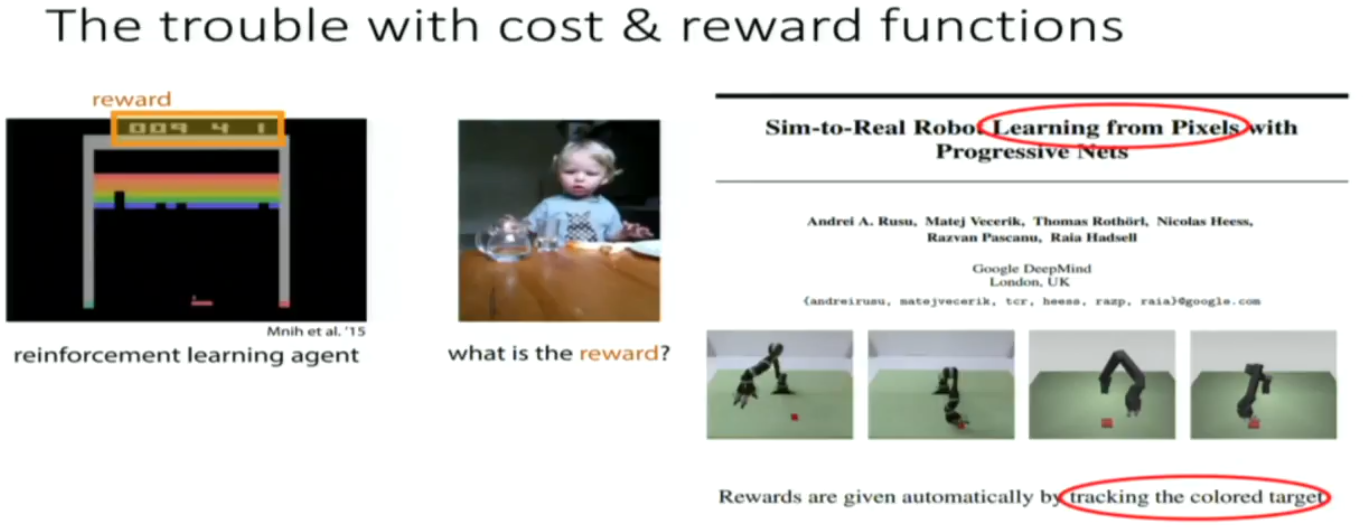
c for cost
r for reward (the negative of cost)
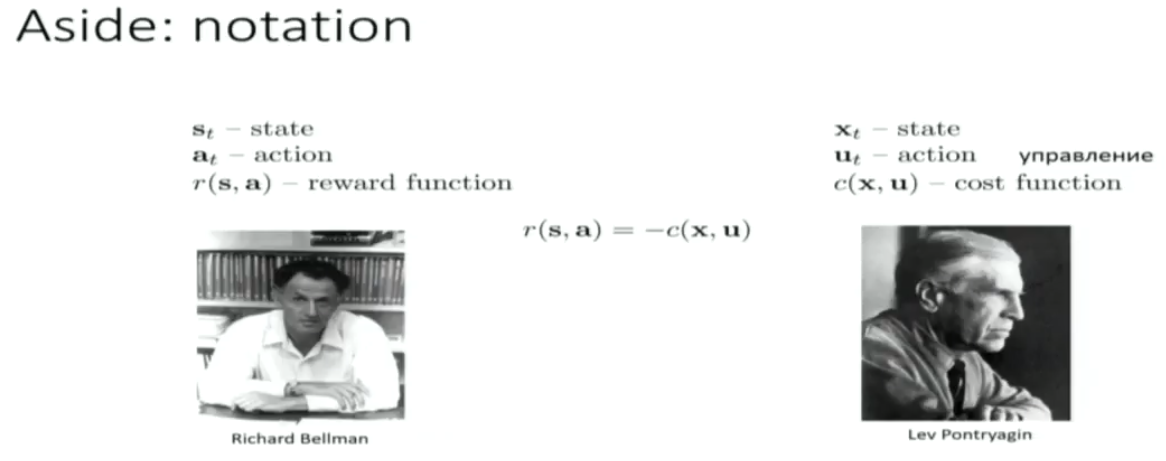
you know there maybe a little bit culture differences here. so like americans like to believe life is for reward, but maybe russians behavior more pessimistically.
HAhahahahahahaha....

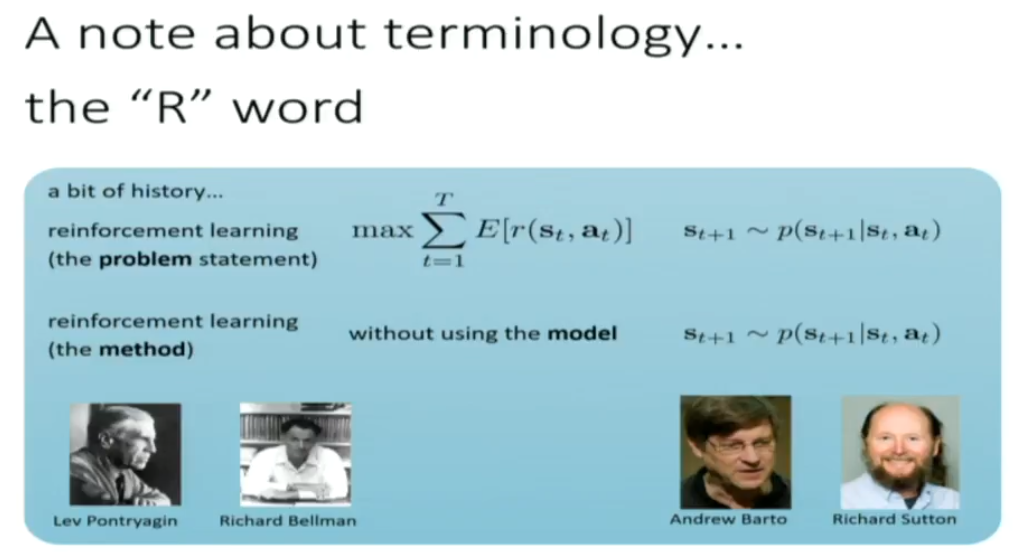
reinforcement learning in CS is exactly the same as optimal control in dynamic programming

 浙公网安备 33010602011771号
浙公网安备 33010602011771号