[ROS] Chinese MOOC || Chapter-8.1 tf介绍:tf tree 8.2 tf消息 8.3 tf in c++ 8.4 tf in python
tf:coordinate transform
urdf:ros 机器人属性描述的规范
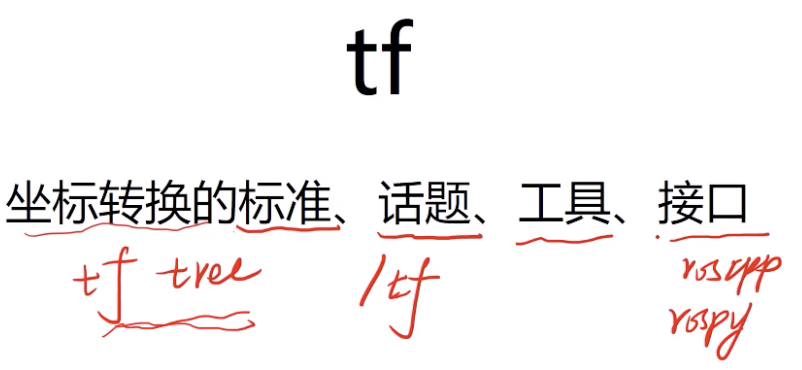
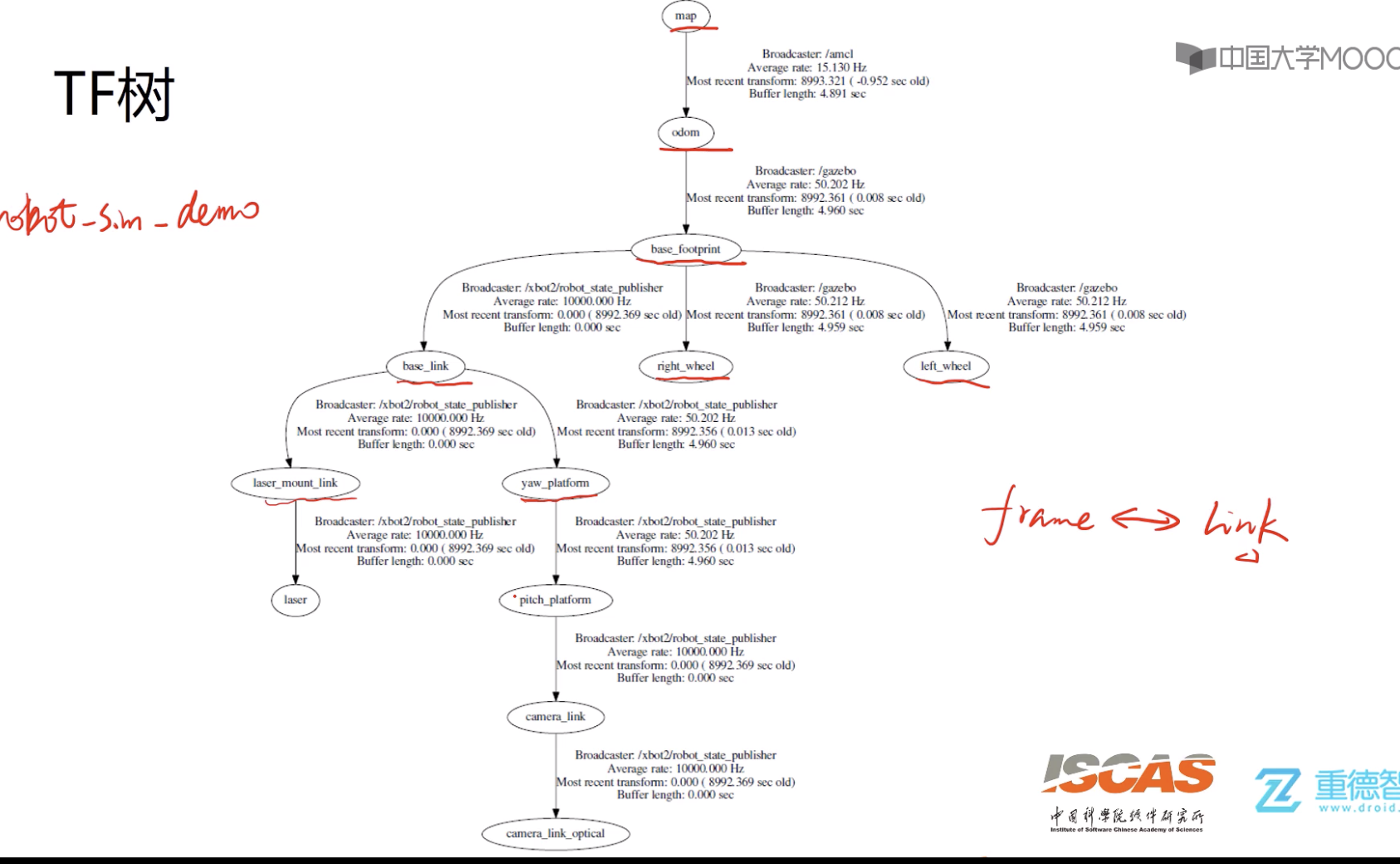
tf树必须是连通的
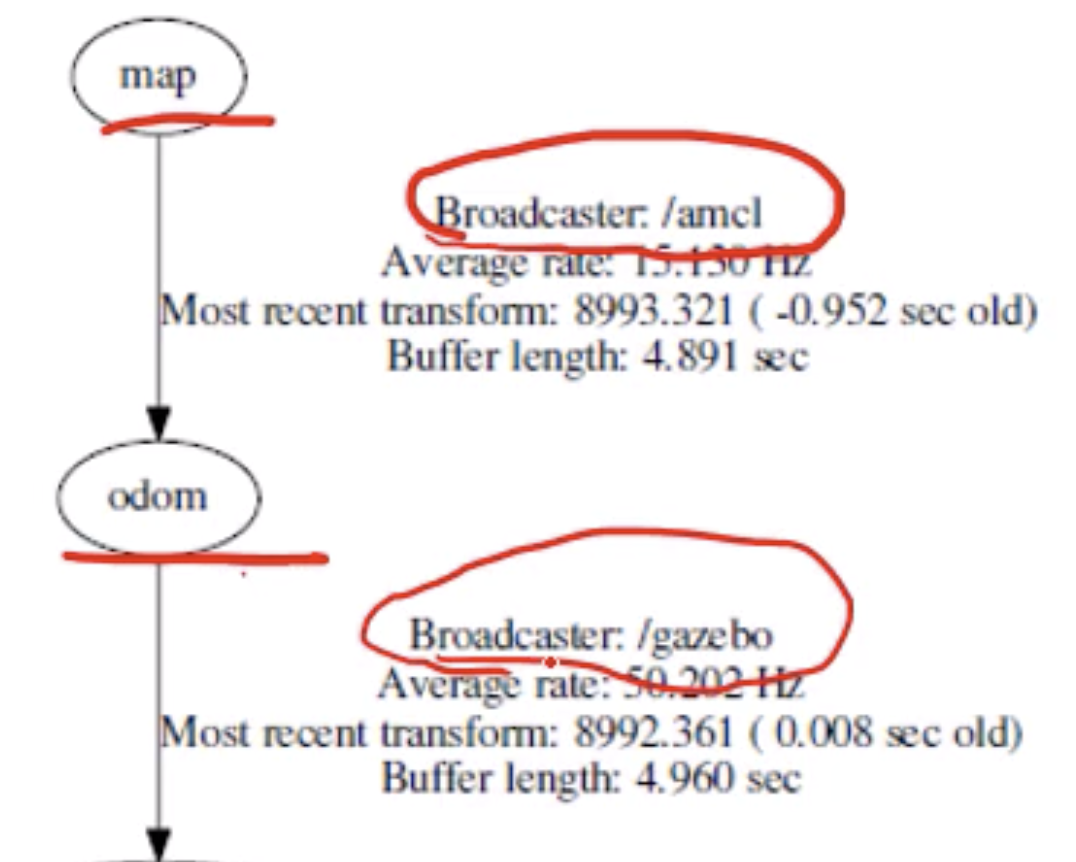
如果没有人来维护两个frame之间的联系(一个发送消息的node,or called broadcaster),就会断掉
broadcaster就一个是publisher
tf树是整个消息的反映
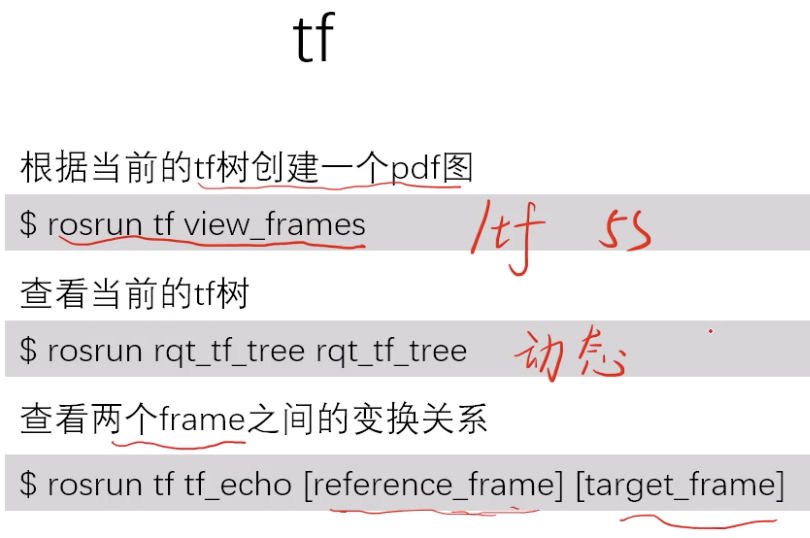
tf树就是把tf这个topic截取了一段信息来恢复出来的tree
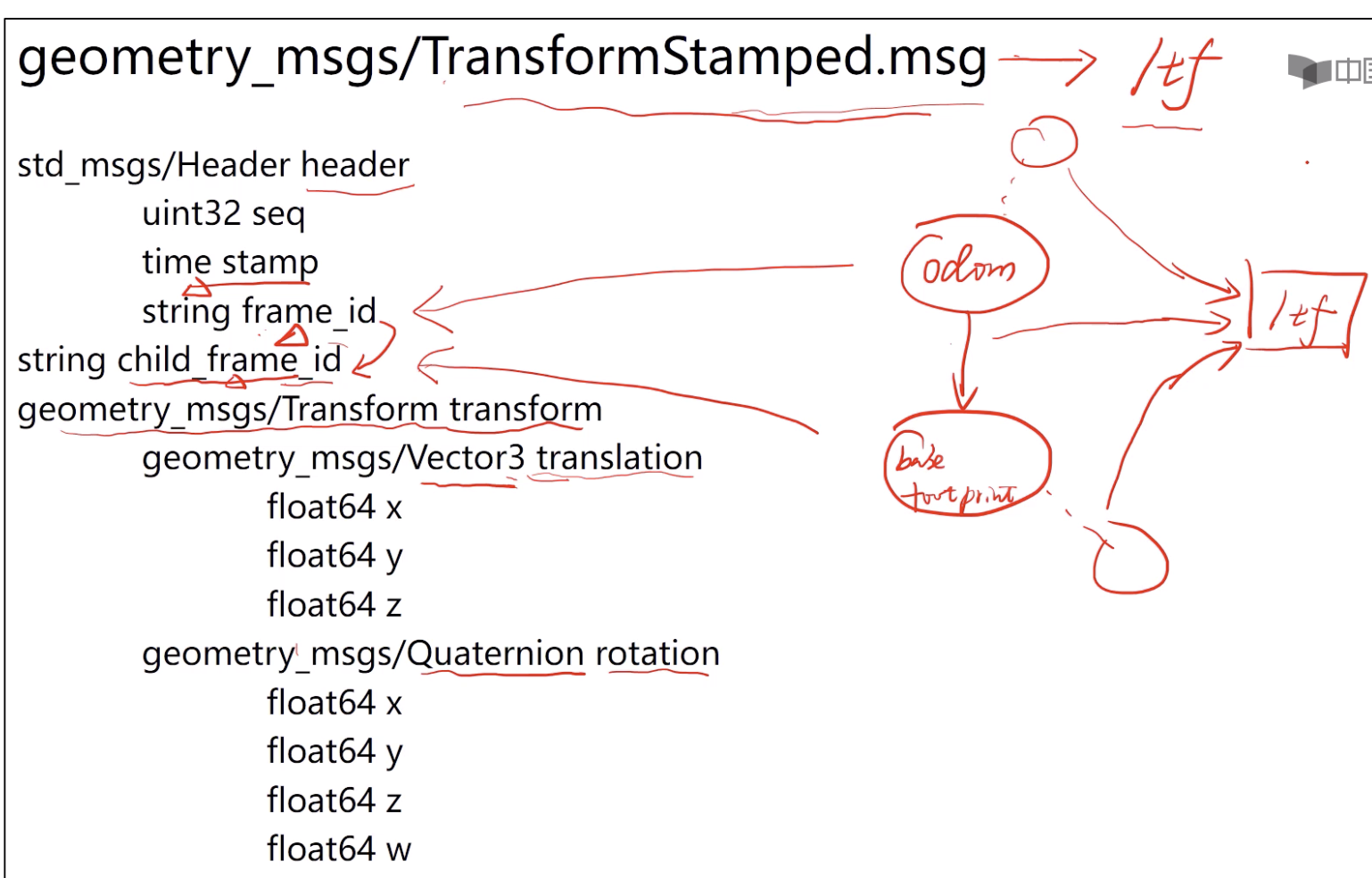
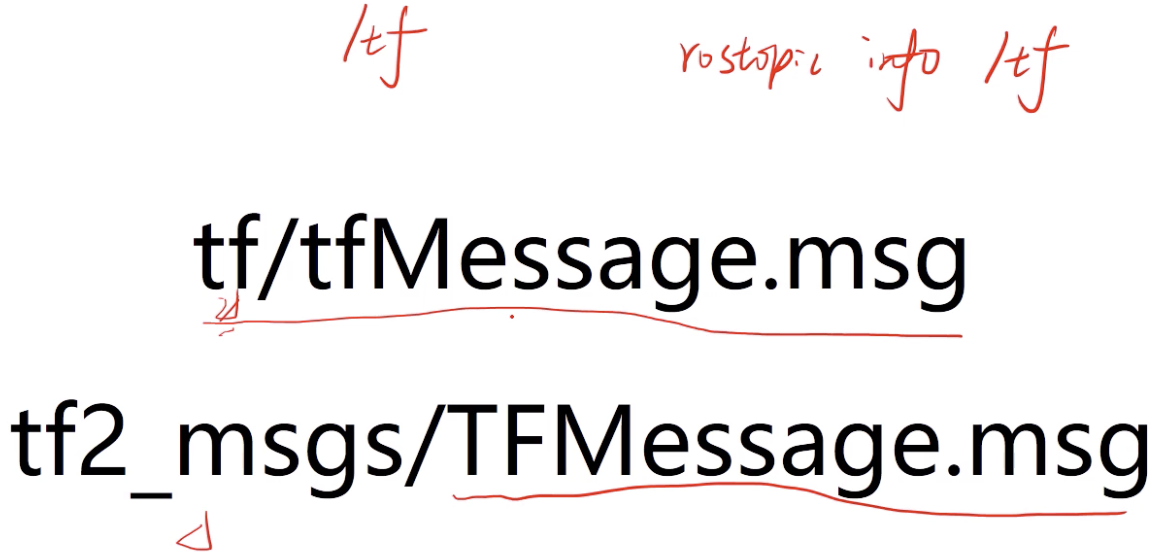
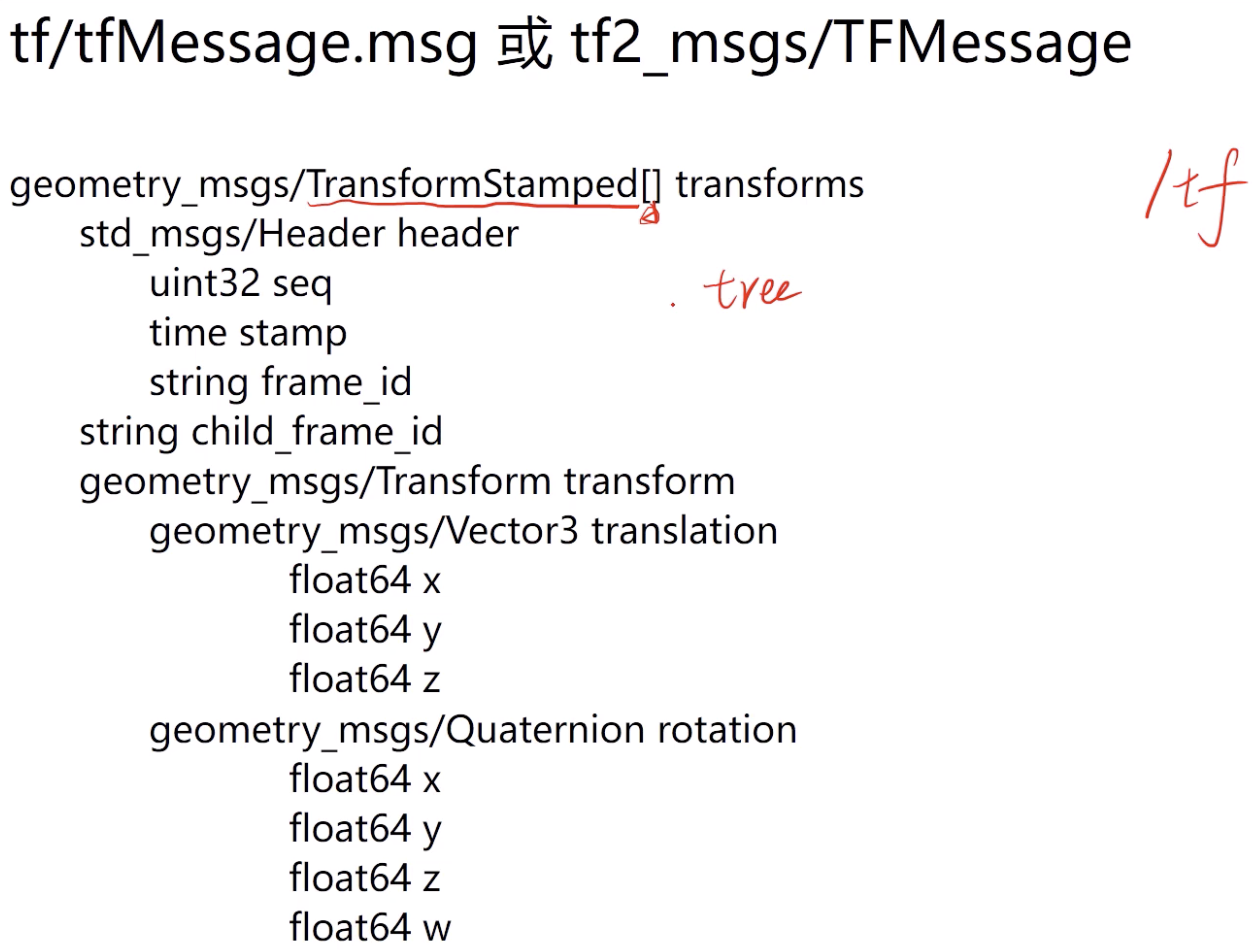
下面来看tf消息是什么,以及怎么发布。
![]()

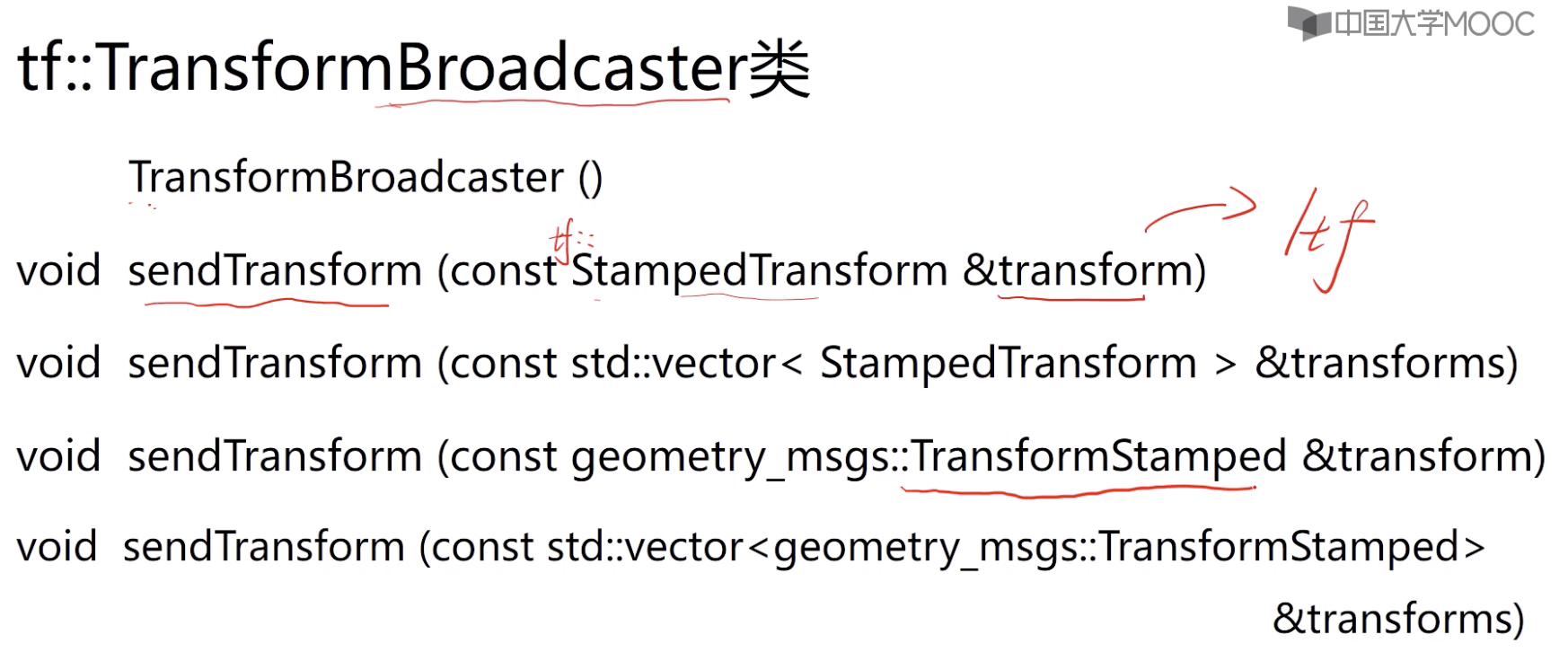
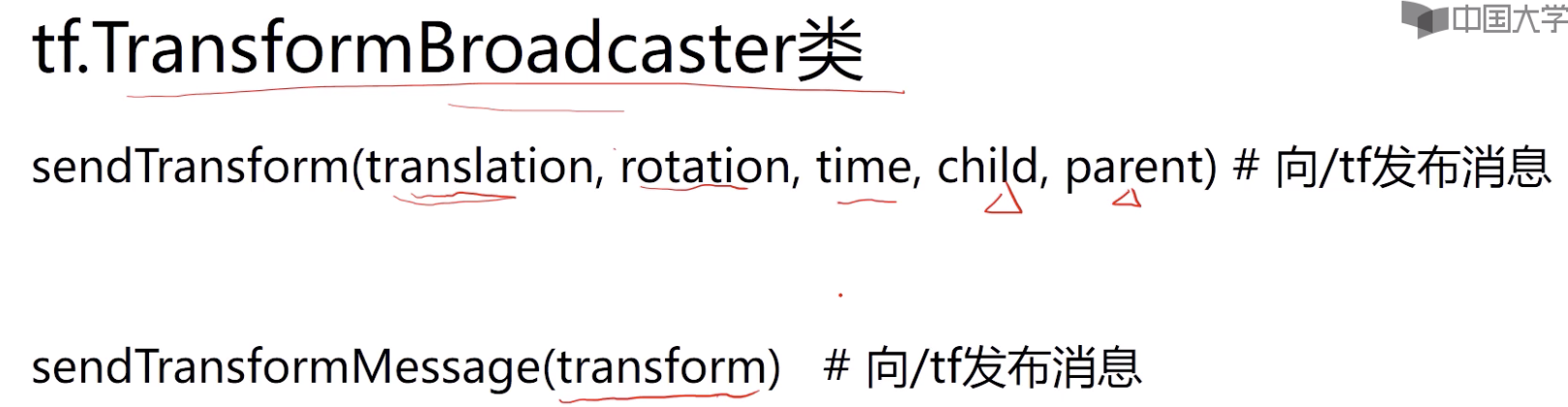
sendtransform 是把publisher封装了
![]()

 浙公网安备 33010602011771号
浙公网安备 33010602011771号