
[ROS] Chinese MOOC || Chapter-3.4 操作演示


 ←正确的用法
←正确的用法
同时要指定topic

深度相机的信息类型看上去也可以被image view启动
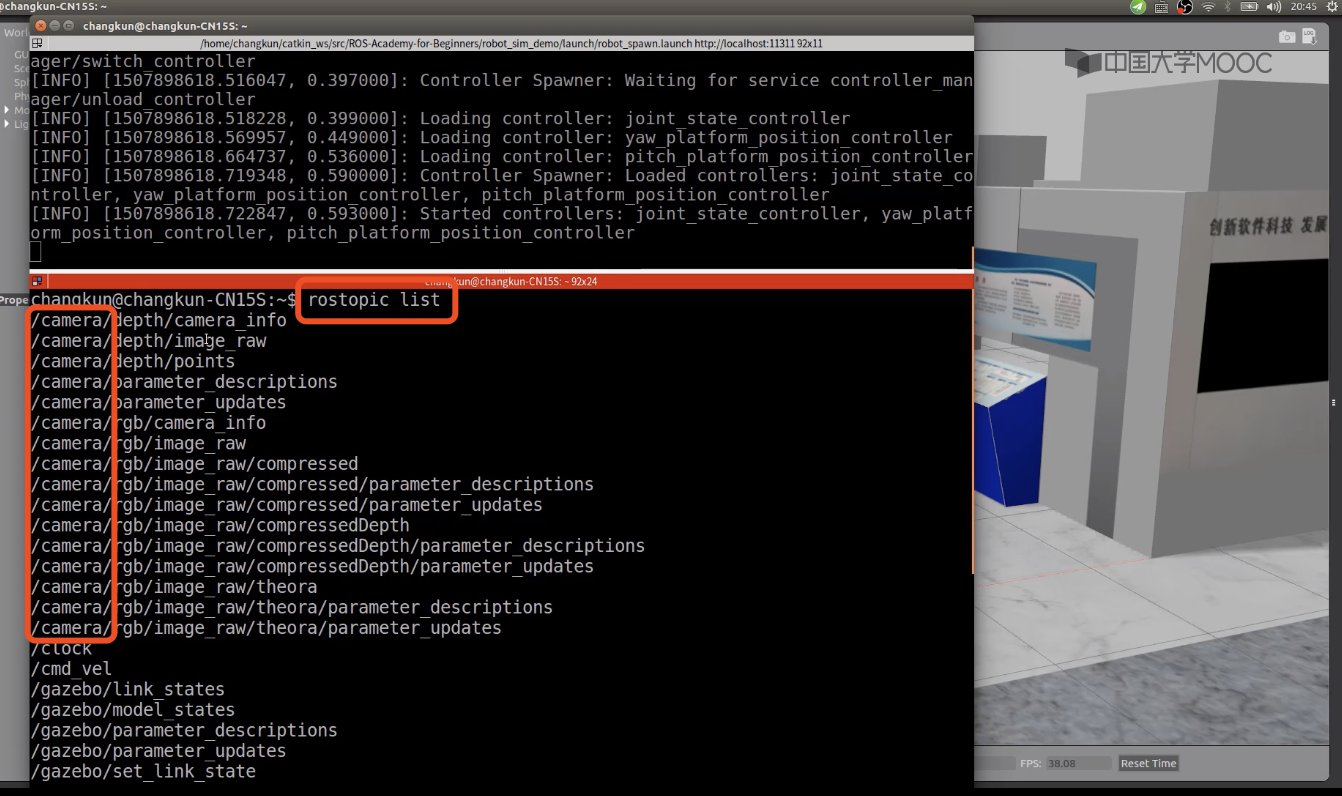
 查看深度图
查看深度图
rgb+深度图 = 点云数据

rosnode info /teleop_....
速度控制node
再看下topic:publisher是速度控制node,接受者是gazebo
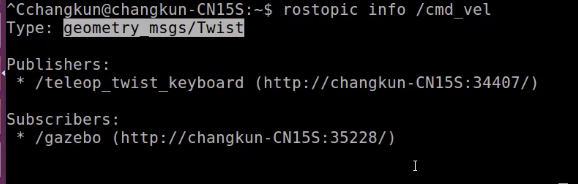
类型也定义了

然后控制运动
 👈/cmd_vel的内容
👈/cmd_vel的内容
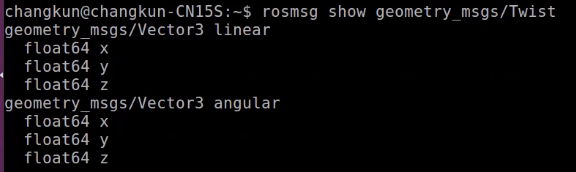
cmd vel内容的定义
rosmsg list:系统上面所有的message都显示出来
rostopic pub /cmd_vel发送自己定义的信息


 浙公网安备 33010602011771号
浙公网安备 33010602011771号