【雕爷学编程】Arduino动手做(152)---BMI160 六轴陀螺仪模块
 雕爷学编程,Arduino动手做,开源硬件,创客传感器,BMI160 六轴陀螺仪模块
雕爷学编程,Arduino动手做,开源硬件,创客传感器,BMI160 六轴陀螺仪模块
37款传感器与执行器的提法,在网络上广泛流传,其实Arduino能够兼容的传感器模块肯定是不止这37种的。鉴于本人手头积累了一些传感器和执行器模块,依照实践出真知(一定要动手做)的理念,以学习和交流为目的,这里准备逐一动手尝试系列实验,不管成功(程序走通)与否,都会记录下来—小小的进步或是搞不掂的问题,希望能够抛砖引玉。
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验一百五十二:BMI160模块 6DOF 6轴 角速度 陀螺仪+重力加速度传感器IICSPI

知识点:博世BMI160芯片
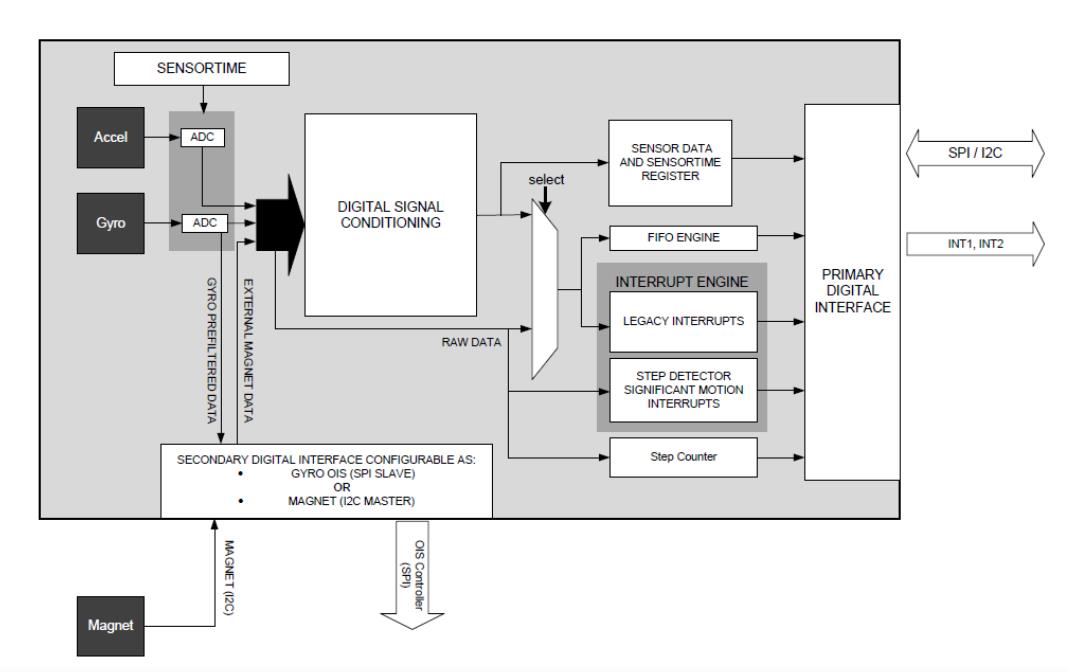
Bosch Sensortec公司推出的最新BMI160惯性测量单元,将最顶尖的16位3轴重力加速度计和超低功耗3轴陀螺仪集成于单一封装。采用14管脚LGA封装,尺寸为2.5×3.0×0.8mm3。当加速度计和陀螺仪在全速模式下运行时,耗电典型值低至950µA,仅为市场上同类产品耗电量的50%或者更低。
Bosch BMI160专为智能手机、平板电脑、可穿戴设备设计,内置智能计步算法,可通过寄存器直接读取步数。内置的3轴加速度和3轴陀螺仪可以实现跑步,健身等运动检测。内置LDO电源管理芯片,支持3.2~6V宽电压供电,并且板载I2C电平转换电路,兼容Arduino 3.3V以及5V的控制器直接驱动。

BMI160的数据流框图
BMI160参数
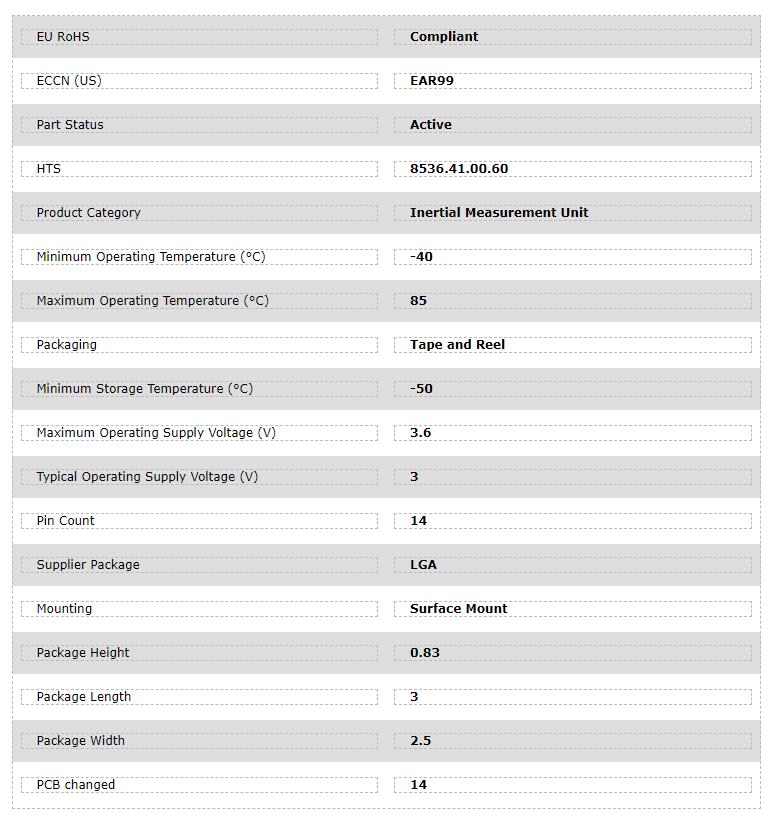

芯片技术规格
工作电压:3.2V~6V
电流消耗:<1mA
接口方式:2.54间距排针
加速度可选标尺:±2g/±4g/±8g/±16g
陀螺仪可选标尺:±125°/s,±250°/s,±500°/s,±1000°/s,±2000°/s
加速度计零点漂移:±40mg
陀螺仪零点漂移:±10°/s
可编程频率:25/32Hz~1600Hz
6D检测定位
16位数据输出
抗冲击:10,000 gx 200μs
2个独立的可编程中断发生器
内置1024 byte FIFO
工作温度:-40℃~+85℃
GY-BMI160模块(三轴陀螺仪+三轴加速度计)
使用芯片:BMI160
电源:3-5v(内部低压差稳压器)
通讯方式:标准IIC/SPI通讯协议
内置16bit AD转换芯片,16位数据输出
陀螺仪范围:±125±250±500±1000±2000°/s
加速度范围:±2±4±8±16g
采用沉金PCB,机器焊接工艺,保证质量
2.54mm 间距
模组尺寸 13mm*18mm


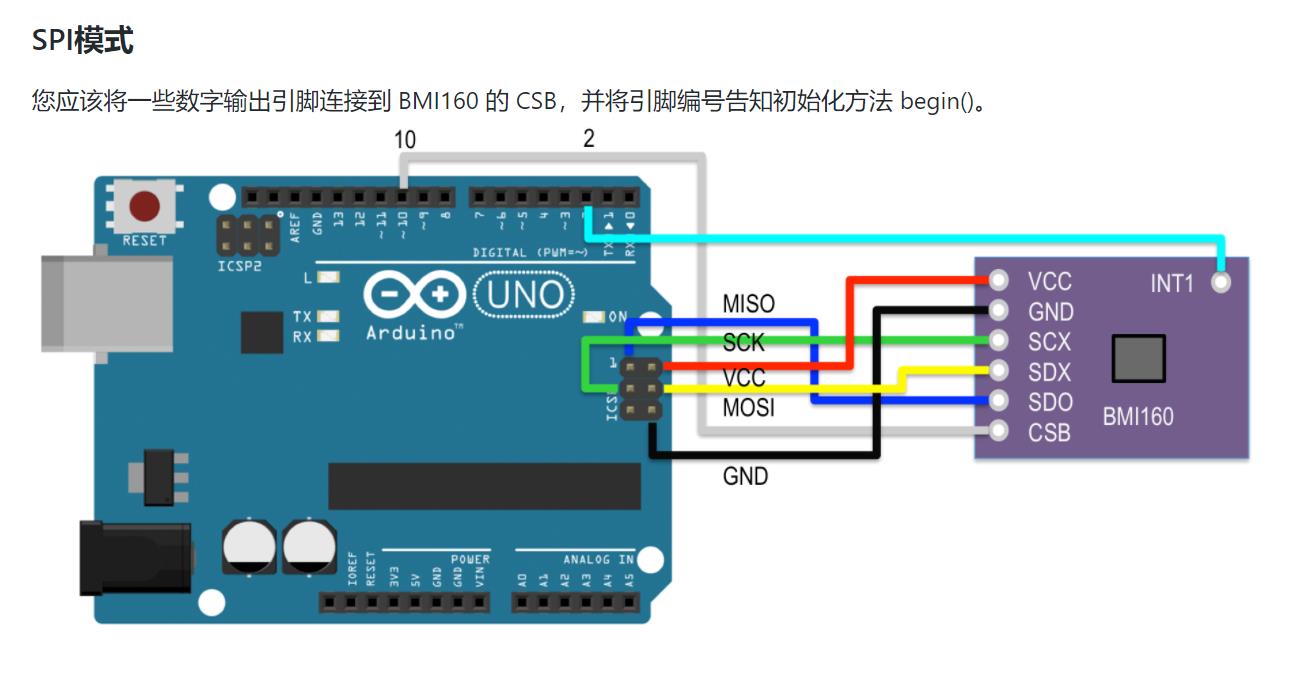
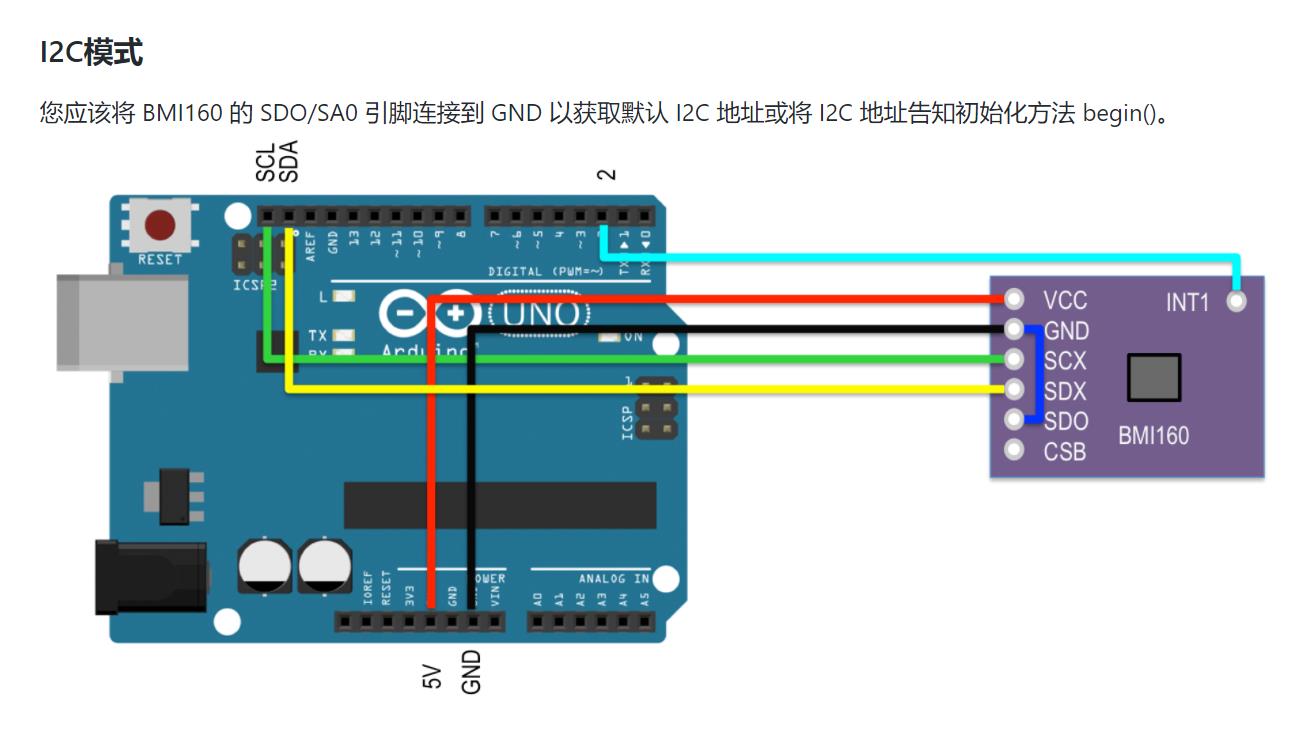
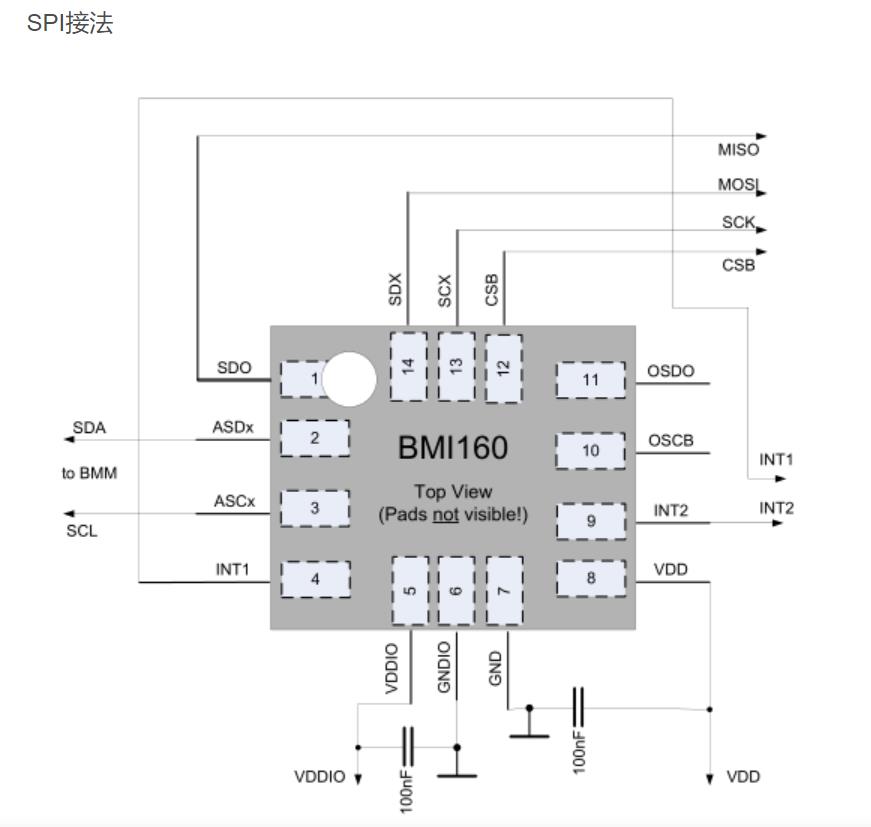
BMI160模块接脚定义

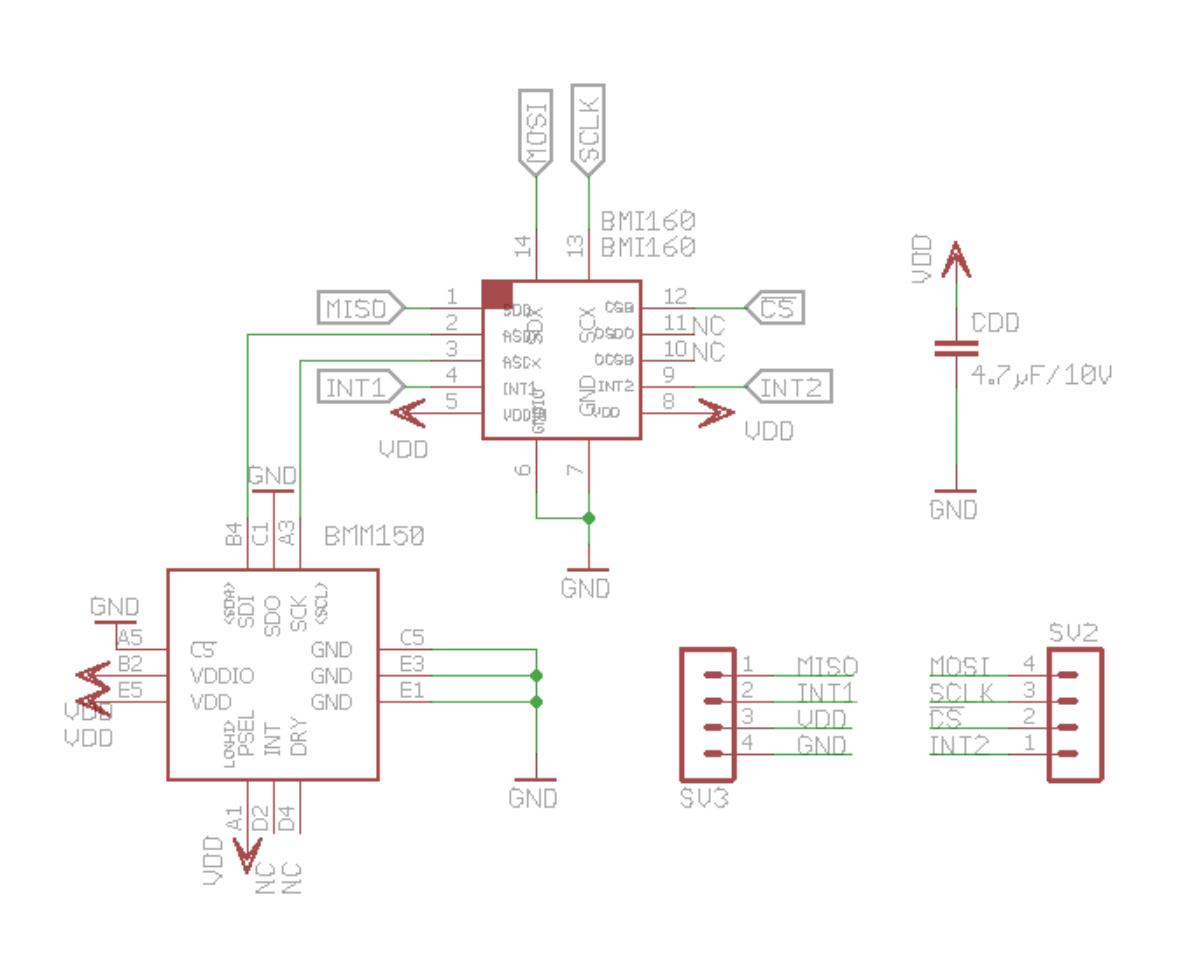
BMI160模块参考电原理图


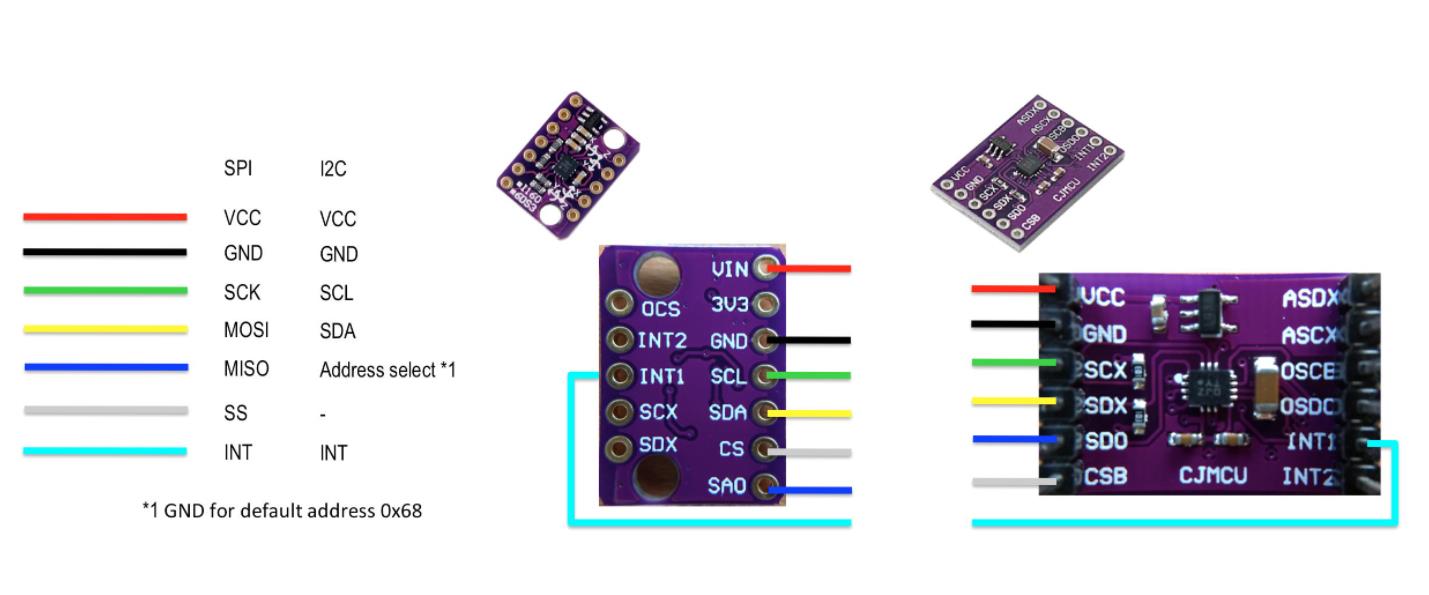
两种 BMI160 分线板
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验一百五十二:BMI160 6轴惯性运动传感器 16位3轴加速度+超低功耗3轴陀螺仪 I2C/SPI 14LGA
项目之一:动态读取陀螺仪 x/y/z 值
实验开源代码
/*
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验一百五十二:BMI160 6轴惯性运动传感器 16位3轴加速度+超低功耗3轴陀螺仪 I2C/SPI 14LGA
项目之一:动态读取陀螺仪 x/y/z 值
实验接线:
BMI160 UNO
VIN 5V
GND GND
SCL A5
SDA A4
SAO GND
INT1 D2
*/
#include <BMI160Gen.h>
const int select_pin = 10;
const int i2c_addr = 0x68; //I2C的地址
void setup() {
Serial.begin(9600);
while (!Serial); // 等待串口打开
// 初始化设备
//BMI160.begin(BMI160GenClass::SPI_MODE, select_pin);
BMI160.begin(BMI160GenClass::I2C_MODE, i2c_addr);
}
void loop() {
int gx, gy, gz; // 原始陀螺值
// 从设备读取原始陀螺仪测量值
BMI160.readGyro(gx, gy, gz);
// 显示制表符分隔的陀螺仪 x/y/z 值
Serial.print("xyz:\t");
Serial.print(gx);
Serial.print("\t");
Serial.print(gy);
Serial.print("\t");
Serial.print(gz);
Serial.println();
delay(600);
}
实验串口返回情况
实验场景图

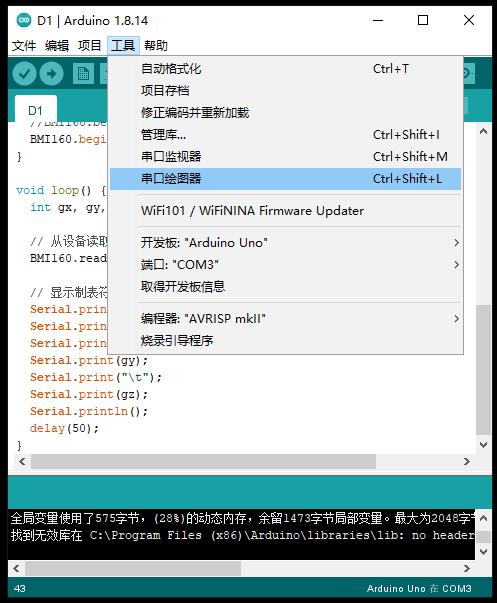
打开IDE——工具——串口绘图器
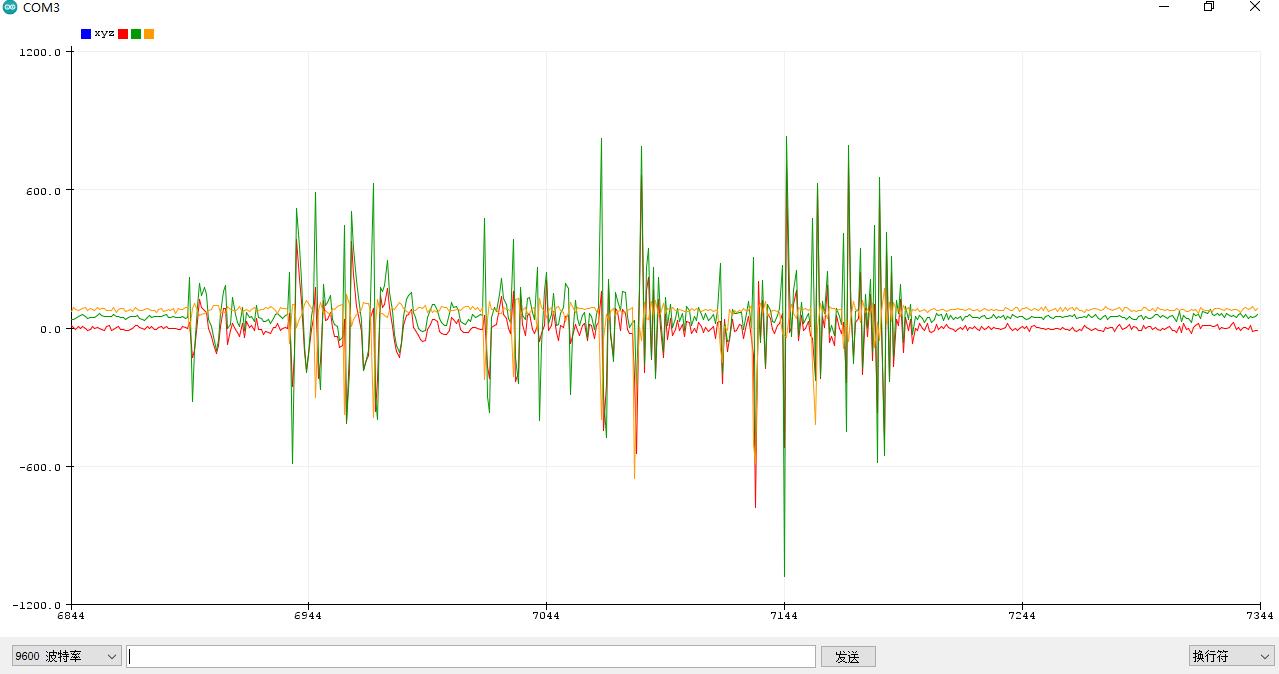
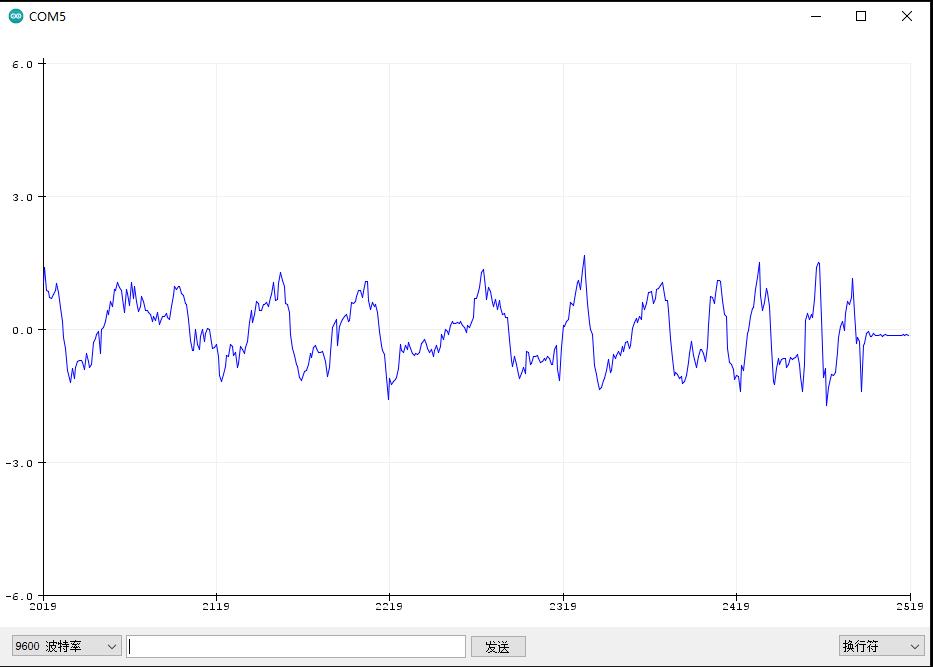
实验串口绘图器返回情况(手指敲打桌面)
实验串口绘图器返回情况(三个方向摇动模块)
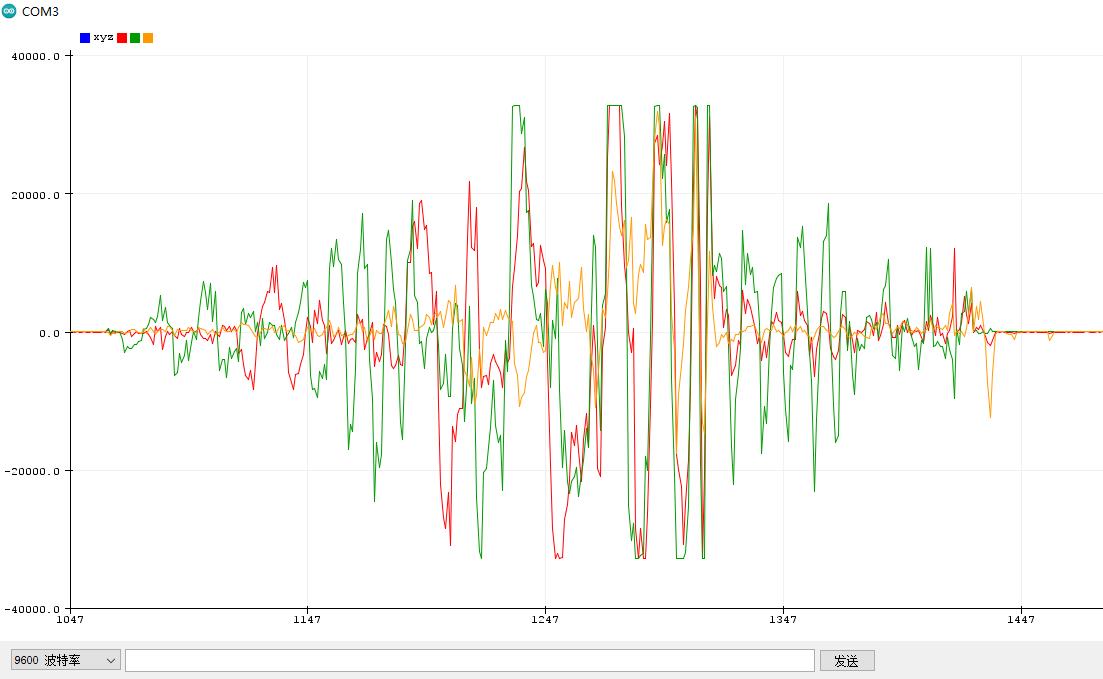
实验串口绘图器返回情况(大力极限摇动模块)

实验一百五十二:BMI160 6轴惯性运动传感器 16位3轴加速度+超低功耗3轴陀螺仪 I2C/SPI 14LGA
项目之一:动态读取陀螺仪 x/y/z 值(35秒视频)
https://v.youku.com/v_show/id_XNTgwMTMzNDg3Mg==.html?spm=a2hcb.playlsit.page.1
BMI160 技术数据
- 数字分辨率
- 加速度计 (A):16 位
- 陀螺仪(G):16bit
- 测量范围(可编程)
- (A):±2g、±4g、±8g、±16g
- (G):±125°/s、±250°/s、±500°/s、±1000°/s、±2000°/s
- 灵敏度(校准)
- (A):±2g:16384LSB/g
- ±4g:8192LSB/g
- ±8g:4096LSB/g
- ±16g:2048LSB/g
- (G):±125°/s:262.4 LSB/°/s
- ±250°/s:131.2 LSB/°/s
- ±500°/s:65.6 LSB/°/s
- ±1000°/s:32.8 LSB/° /s
- ±2000°/s:16.4 LSB/°/s
- 零重力偏移(典型值,在整个生命周期内)
- (A):±40mg
- (G):± 10°/s
- 噪声密度(典型值)
- (A):180 μg/√Hz
- (G):0.008°/s/√Hz
- 带宽(可编程):1600 Hz … 25/32 Hz
- 数字输入/输出:SPI、I²C、4x 数字中断
- 电源电压 (VDD):1.71 … 3.6 V
- I/0 电源电压 (VDDIO):1.2 … 3.6 V
- 温度范围:-40 … +85°C
- 目前的消费
- 完全运行:950 μA
- 低功耗模式:3 μA
- FIFO 数据缓冲区:1024 字节
- LGA 封装:2.5 × 3.0 × 0.8 mm³
- 抗冲击性:10,000 gx 200 μs
BMI160 目标应用
- 增强现实和沉浸式游戏
- 3D 扫描和室内测绘
- 室内导航、行人航位推算和计步
- 6 轴和 9 轴传感器融合、空中鼠标应用
- 光学防抖
BMI160 目标设备
- 手机和平板电脑
- 可穿戴设备,例如智能手表、头戴式显示器、运动和健身设备
- 游戏控制器和智能遥控器
- 玩具,例如四轴飞行器
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验一百五十二:BMI160 6轴惯性运动传感器 16位3轴加速度+超低功耗3轴陀螺仪 I2C/SPI 14LGA
项目之二:使用中断的BMI160简单计步功能
实验开源代码
/*
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验一百五十二:BMI160 6轴惯性运动传感器 16位3轴加速度+超低功耗3轴陀螺仪 I2C/SPI 14LGA
项目之二:使用中断的BMI160简单计步功能
实验接线:
BMI160 UNO
VIN 5V
GND GND
SCL A5
SDA A4
SAO GND
INT1 D2
*/
#include <BMI160Gen.h>
const int bmi160_i2c_addr = 0x68;
const int bmi160_select_pin = 10;
const int bmi160_interrupt_pin = 2;
void bmi160_intr(void){
Serial.println("BMI160 中断:轻拍!");
}
void setup() {
Serial.begin(9600);
while (!Serial);
// initialize device
Serial.println("正在初始化 IMU 设备...");
//BMI160.begin(BMI160GenClass::SPI_MODE, bmi160_select_pin, bmi160_interrupt_pin);
BMI160.begin(BMI160GenClass::I2C_MODE, bmi160_i2c_addr, bmi160_interrupt_pin);
BMI160.attachInterrupt(bmi160_intr);
BMI160.setIntTapEnabled(true);
Serial.println("初始化 IMU 设备...完成。");
}
void loop() {
}
实验串口返回情况

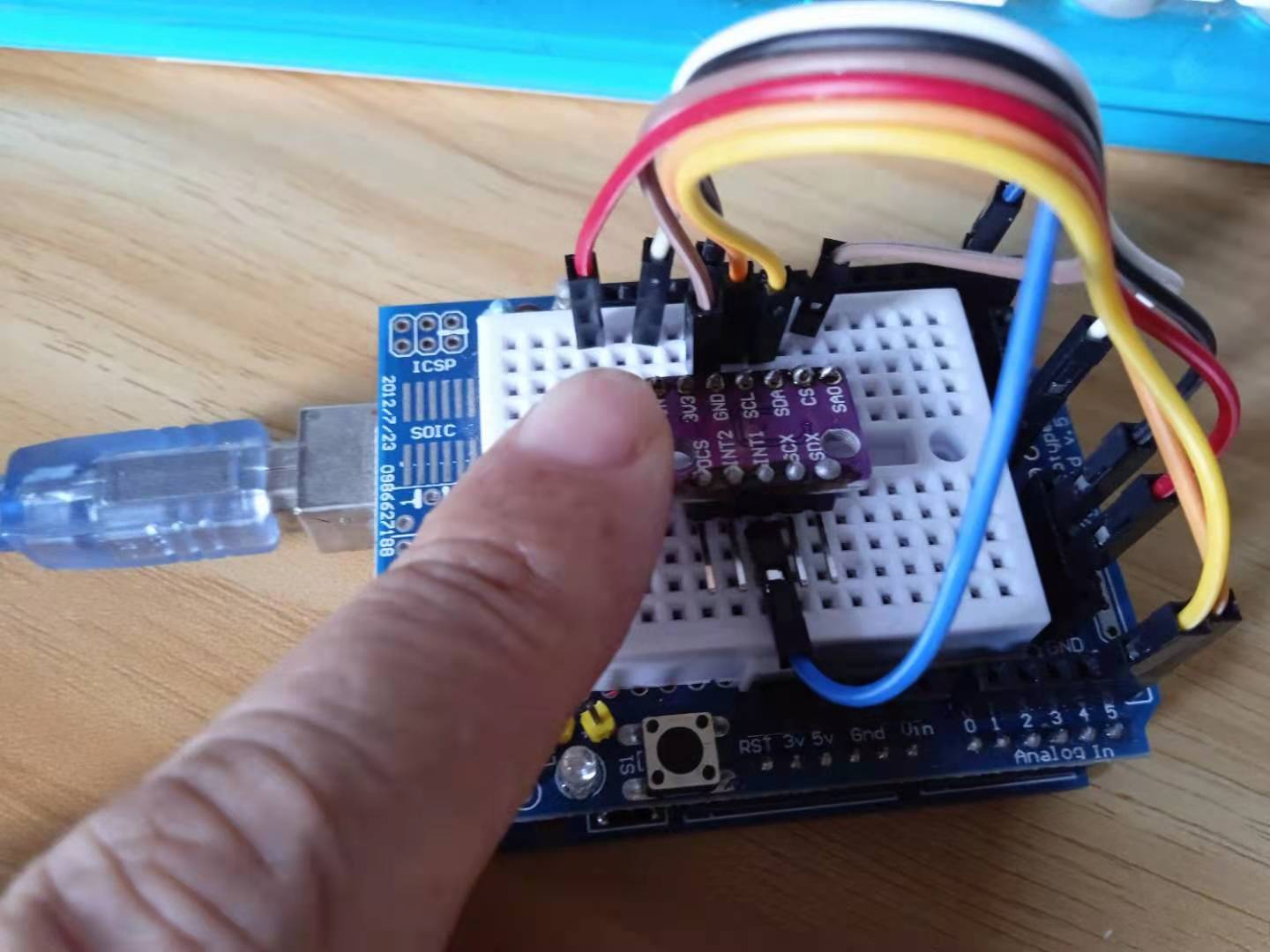
实验场景图
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验一百五十二:BMI160 6轴惯性运动传感器 16位3轴加速度+超低功耗3轴陀螺仪 I2C/SPI 14LGA
项目之六:简易计步器
实验开源图形编程(Mind+、编玩边学)

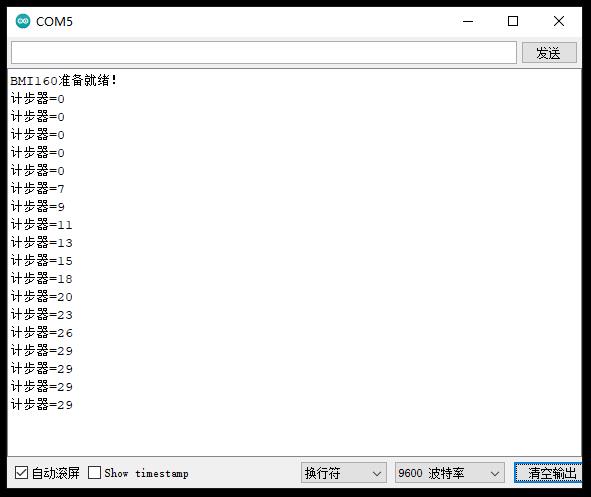
实验串口返回情况
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验一百五十二:BMI160 6轴惯性运动传感器 16位3轴加速度+超低功耗3轴陀螺仪 I2C/SPI 14LGA
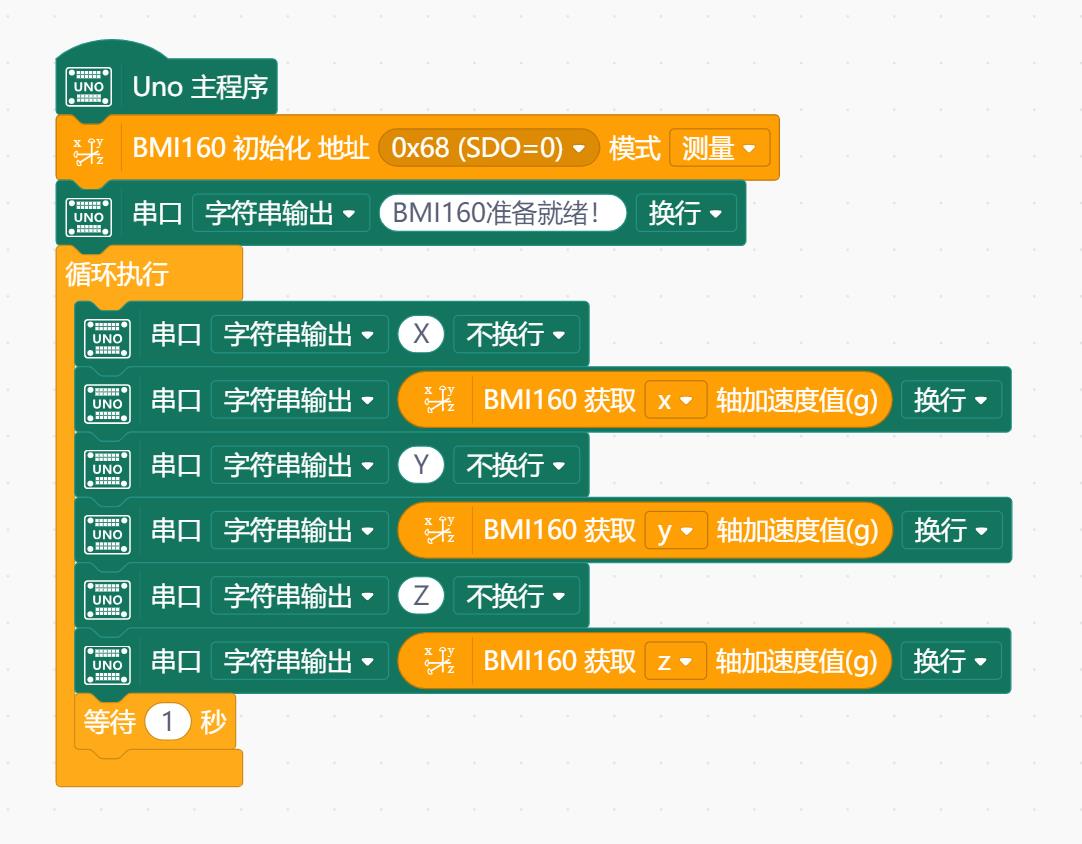
项目之七:简易测量三轴数据
实验开源图形编程(Mind+、编玩边学)
实验串口返回情况

【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验一百五十二:BMI160 6轴惯性运动传感器 16位3轴加速度+超低功耗3轴陀螺仪 I2C/SPI 14LGA
项目之八:简易测量X轴的动态波形
实验开源图形编程(Mind+、编玩边学)

实验串口绘图器返回情况

 浙公网安备 33010602011771号
浙公网安备 33010602011771号