2020-2021-1 20209320 《Linux内核原理与分析》第三周作业
1.实验部分
cd LinuxKernel/linux-3.9.4
make allnoconfig
make
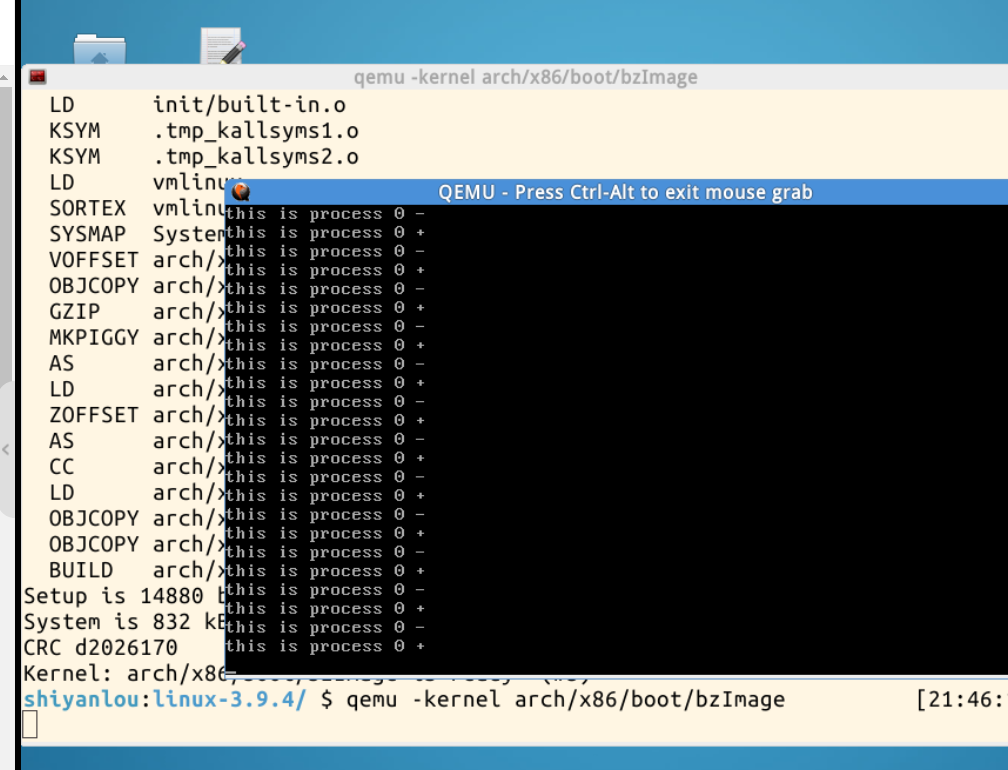
qemu -kernel arch/x86/boot/bzImage
运行结果是:
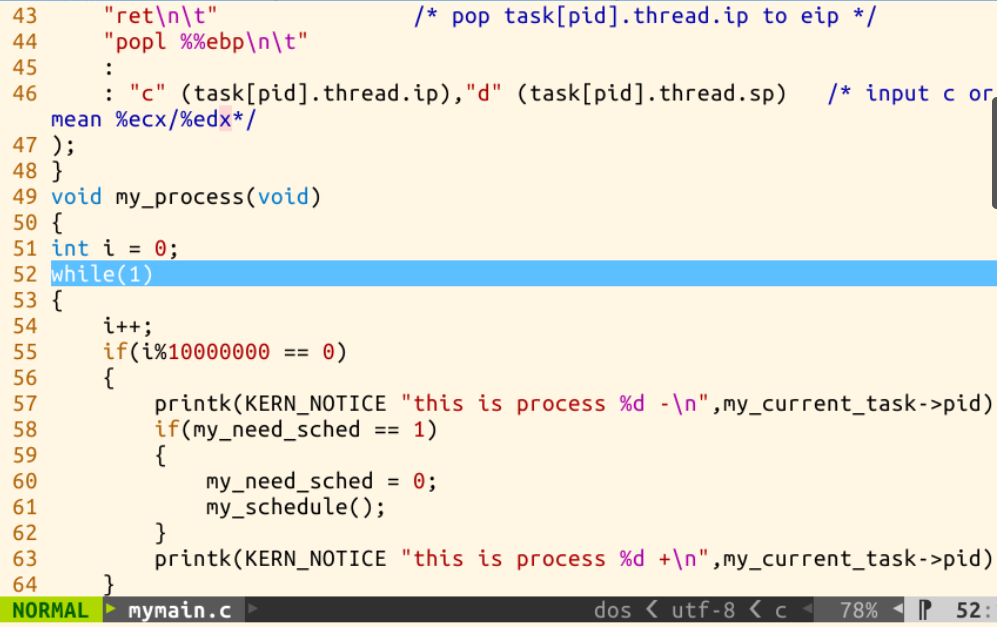
修改mymain.c
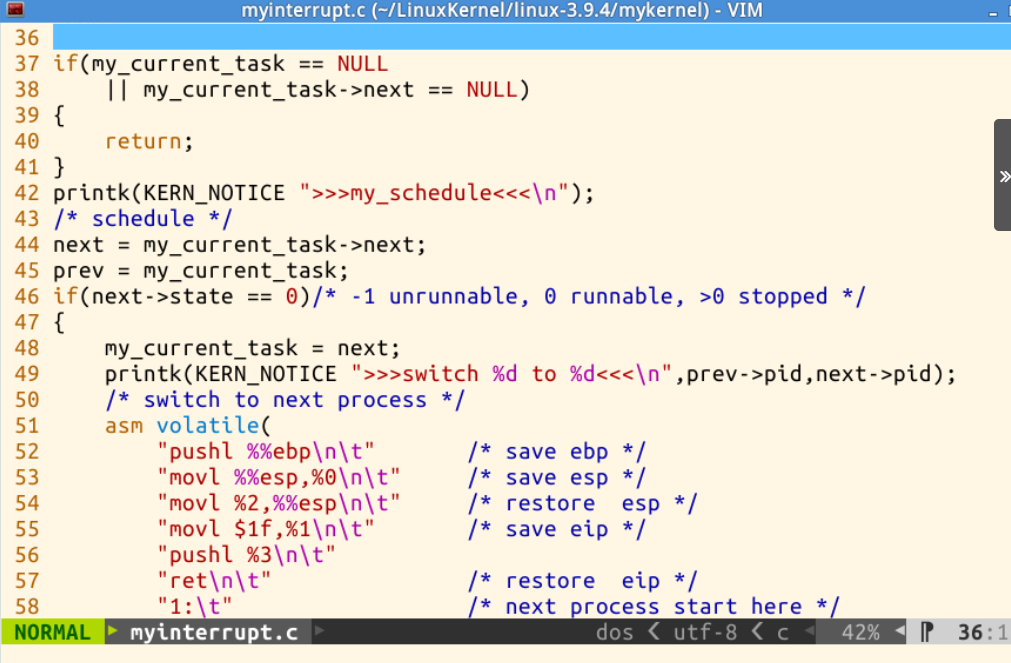
myinterrupt.c

运行结果:
main 堆栈变化:

实验分析
当mykernel自制操作系统启动后,即qemu命令执行后,系统会首先调用mymain产生一个进程,该进程内while循环条件恒为1所以永远执行输出“my_start_kernel here”+累计循环次数,没有结束的时候。此时由系统时钟中断触发调用myinterrupt产生一个新进程,并输出“my_timer_handler here”,结束后返回mymain产生的进程继续执行,等待下一次系统时钟中断触发调用myinterrupt产生一个新进程,myinterrupt产生的新进程和上一次的属于不同的进程,而mymain由于循环没有终止的时候,所以永远是原来的那个进程。
通过观察可以发现,当执行myinterrupt后返回mymain时,终端输出的累计循环次数是连续的,并没有中断或重置,说明CPU和内核代码共同实现了保存现场和恢复现场的功能,会将一些重要的寄存器,比如eip、ebp、esp等保存下来,等待切换回来的时候继续执行。
中断发生时用户堆栈和内核堆栈的切换
如果一个中断产生时任务正在用户代码中执行,那么该中断会引起CPU特权级从3到0的变化,此时CPU就会运行用户态堆栈到内核态堆栈的切换操作。CPU会从当前任务的任务状态段TSS中取得新堆栈的段选择符和偏移量。因为中断服务程序在内核中,属于0级特权级代码,所以48位的内核态堆栈指针会从TSS的ss0和esp0字段中获得。在定位了新堆栈(内核态堆栈)之后,CPU就会首先把原用户态堆栈指针ss和esp压入内核态堆栈,随后把标志积存器eflags的内容和返回位置cs,eip压入内核态堆栈。
内核的系统调用是一个软件中断,因此任务调用系统调用时就会进入内核并执行内核中的中断服务代码。此时内核代码就会使用该任务的内核态堆栈进行操作。同样,当进入内核程序时,由于特权级别发生了改变,用户态堆栈的堆栈段和堆栈指针以及eflags会被保存在任务的内核态堆栈中。而在执行iret退出内核程序返回到用户程序时,将恢复用户态的堆栈和eflags。
如果一个任务正在内核态中运行,那么若CPU响应中断就不再需要进行堆栈切换操作。因为此时该任务运行的内核代码已经在使用内核态堆栈,并且不涉及到优先级别的变化,所以CPU仅把eflags和中断返回指针cs,eip压入当前内核态堆栈,然后执行中断服务过程。
实验代码:
mymain.c
#include <linux/types.h>
#include <linux/string.h>
#include <linux/ctype.h>
#include <linux/tty.h>
#include <linux/vmalloc.h>
#include "mypcb.h"
tPCB task[MAX_TASK_NUM];
tPCB * my_current_task = NULL;
volatile int my_need_sched = 0;
void my_process(void);
void __init my_start_kernel(void)
{
int pid = 0;
int i;
/* Initialize process 0*/
task[pid].pid = pid;
task[pid].state = 0;/* -1 unrunnable, 0 runnable, >0 stopped */
task[pid].task_entry = task[pid].thread.ip = (unsigned long)my_process;
task[pid].thread.sp = (unsigned long)&task[pid].stack[KERNEL_STACK_SIZE-1];
task[pid].next = &task[pid];
/*fork more process */
for(i=1;i<MAX_TASK_NUM;i++)
{
memcpy(&task[i],&task[0],sizeof(tPCB));
task[i].pid = i;
task[i].state = -1;
task[i].thread.sp = (unsigned long)&task[i].stack[KERNEL_STACK_SIZE-1];
task[i].next = task[i-1].next;
task[i-1].next = &task[i];
}
/* start process 0 by task[0] */
pid = 0;
my_current_task = &task[pid];
asm volatile(
"movl %1,%%esp\n\t" /* set task[pid].thread.sp to esp */
"pushl %1\n\t" /* push ebp */
"pushl %0\n\t" /* push task[pid].thread.ip */
"ret\n\t" /* pop task[pid].thread.ip to eip */
"popl %%ebp\n\t"
:
: "c" (task[pid].thread.ip),"d" (task[pid].thread.sp) /* input c or d mean %ecx/%edx*/
);
}
void my_process(void)
{
int i = 0;
while(1)
{
i++;
if(i%10000000 == 0)
{
printk(KERN_NOTICE "this is process %d -\n",my_current_task->pid);
if(my_need_sched == 1)
{
my_need_sched = 0;
my_schedule();
}
printk(KERN_NOTICE "this is process %d +\n",my_current_task->pid);
}
}
}
myinterrupt.c
#include <linux/string.h>
#include <linux/ctype.h>
#include <linux/tty.h>
#include <linux/vmalloc.h>
#include "mypcb.h"
extern tPCB task[MAX_TASK_NUM];
extern tPCB * my_current_task;
extern volatile int my_need_sched;
volatile int time_count = 0;
/*
* Called by timer interrupt.
* it runs in the name of current running process,
* so it use kernel stack of current running process
*/
void my_timer_handler(void)
{
#if 1
if(time_count%1000 == 0 && my_need_sched != 1)
{
printk(KERN_NOTICE ">>>my_timer_handler here<<<\n");
my_need_sched = 1;
}
time_count ++ ;
#endif
return;
}
void my_schedule(void)
{
tPCB * next;
tPCB * prev;
if(my_current_task == NULL
|| my_current_task->next == NULL)
{
return;
}
printk(KERN_NOTICE ">>>my_schedule<<<\n");
/* schedule */
next = my_current_task->next;
prev = my_current_task;
if(next->state == 0)/* -1 unrunnable, 0 runnable, >0 stopped */
{
my_current_task = next;
printk(KERN_NOTICE ">>>switch %d to %d<<<\n",prev->pid,next->pid);
/* switch to next process */
asm volatile(
"pushl %%ebp\n\t" /* save ebp */
"movl %%esp,%0\n\t" /* save esp */
"movl %2,%%esp\n\t" /* restore esp */
"movl $1f,%1\n\t" /* save eip */
"pushl %3\n\t"
"ret\n\t" /* restore eip */
"1:\t" /* next process start here */
"popl %%ebp\n\t"
: "=m" (prev->thread.sp),"=m" (prev->thread.ip)
: "m" (next->thread.sp),"m" (next->thread.ip)
);
}
else
{
next->state = 0;
my_current_task = next;
printk(KERN_NOTICE ">>>switch %d to %d<<<\n",prev->pid,next->pid);
/* switch to new process */
asm volatile(
"pushl %%ebp\n\t" /* save ebp */
"movl %%esp,%0\n\t" /* save esp */
"movl %2,%%esp\n\t" /* restore esp */
"movl %2,%%ebp\n\t" /* restore ebp */
"movl $1f,%1\n\t" /* save eip */
"pushl %3\n\t"
"ret\n\t" /* restore eip */
: "=m" (prev->thread.sp),"=m" (prev->thread.ip)
: "m" (next->thread.sp),"m" (next->thread.ip)
);
}
return;
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号