
Tx2上运行rplidar A2
首先,有一个比较坑的地方,Tx2默认情况下是没有rplidar A2的这个驱动的,需要我们自己进行内核编译安装。具体安装方法可以看我的Tx2 通过内核编译来获取ttyUSB* 以及ttyACM*的设备名 的这一片文章。但是要注意的一点是:
1、输入 lsusb 命令进行查看串口信息
Bus 001 Device 027: ID 10c4:ea60 Cygnal Integrated Products, Inc. CP210x UART Bridge / myAVR mySmartUSB light
我们将会看到上述的一个信息。这个CP210x就是对应的usb驱动。
我们在内核编译的时候需要将文章中的 ACM 和 ttyUSB 改为 CP210。
具体详情请看Tx2 通过内核编译来获取ttyUSB* 以及ttyACM*的设备名
编译rplidar_ros
$ cd ~/your_ws/src
$ git clone https://github.com/robopeak/rplidar_ros.git
$ cd ~/your_ws && catkin_make这里的your_ws自然就是对应着你的工作空间。
运行rplidar
roslaunch rplidar_ros rplidar.launch这里的launch文件是不会打开rivz可视窗口的
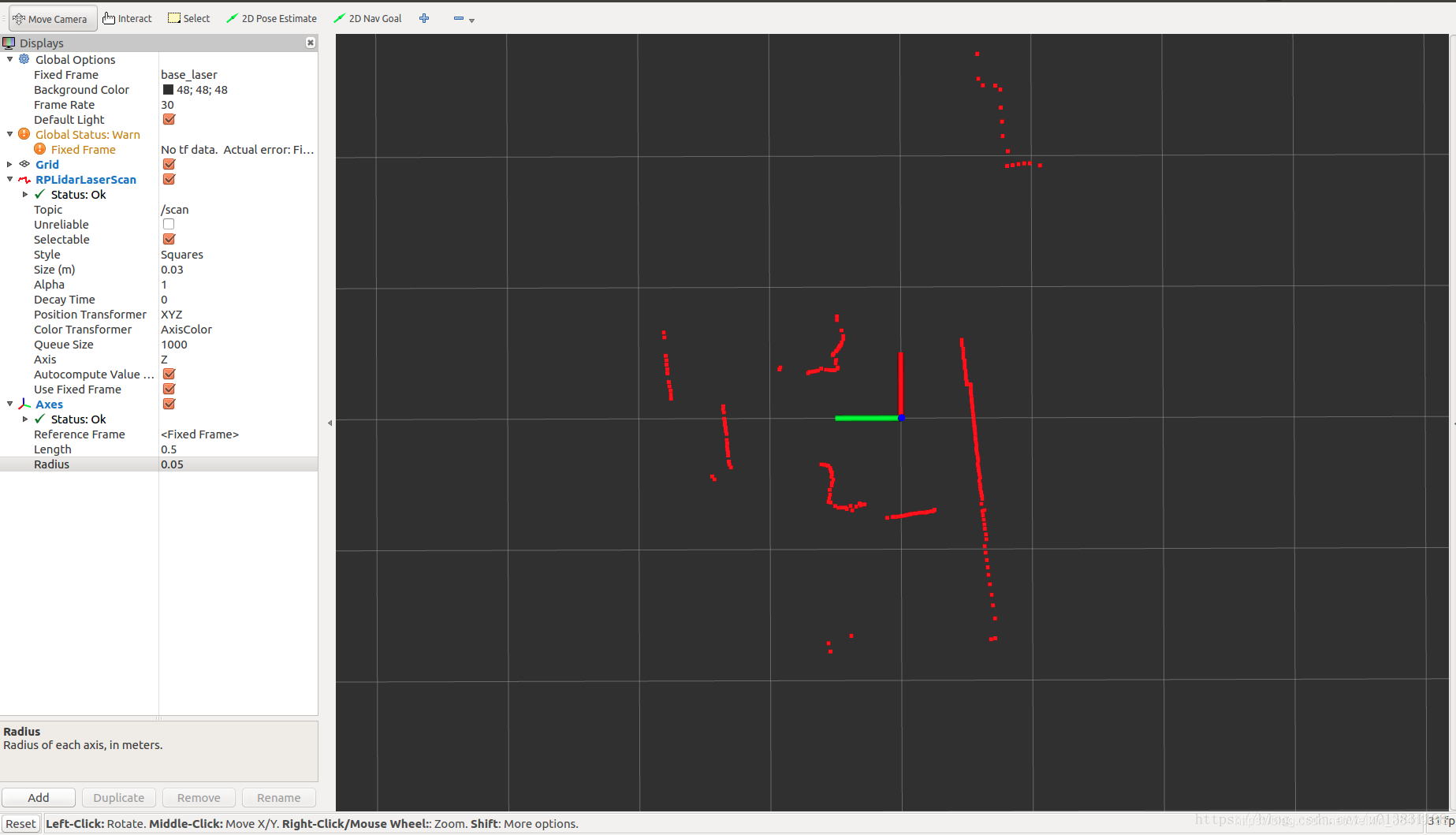
假如想在rviz中查看,可以使用如下命令
roslaunch rplidar_ros view_rplidar.launch到这里我们就可以看到rviz中,rplidar的运行界面了,如下:
posted on 2022-08-13 16:15 DylanYeung 阅读(54) 评论(0) 收藏 举报

 浙公网安备 33010602011771号
浙公网安备 33010602011771号