
Camera CMOS Sensor成像原理
时至今日,手机相机已经是我们几乎无法离开的最重要工具之一。
而且每次手机发布,手机的相机也是我们除了处理器之外最为关键的卖点之一。但是你真的知道它是怎么运转的吗?
看到这里,就有人要问了,大哥,我用相机,我还需要知道它的原理吗?我不知道怎么造汽车,这影响我单手开法拉利?
呃,你说的没错,确实没啥必要知道。但是我就是要写,因为我这周摸鱼就干了这个的总结。☺
首先,都是大家很熟悉的相机类型啦。喜欢摄影的大兄弟一定都懂,就分两种嘛:
1、CCD Sensor
2、CMOS Sensor
而使用CMOS Sensor的相机,是我们现在日常使用最为广泛的相机。也是使得当今手机能够高度集成众多相机的基础。
但是,我们在对CMOS Sensor先按下不表。
先讲讲CCD sensor。你问为啥?因为世界上第一台相机毕竟是CCD Sensor的嘛。
CCD Sensor
全名:Charge Couple Device 电荷耦合器件。好了,对于CCD的介绍到此结束了。毕竟搞手机Camera HAL和ISP算法的人,不需要了解CCD这么多。毕竟我学了,这辈子也用不上呀~
开玩笑,后面会将它和CMOS的区别~
CMOS Sensor
全名:Complementary Metal Oxide Semiconductor 互补金属氧化物半导体
介绍完名字,接下来我们康康他们的区别:
1、内部结构的区别:
① CCD的成像点为X-Y纵横矩阵排列,每个成像点有一个光电二极管和其控制的一个邻近电荷存储区组成。整个结构复杂,增大了耗电量,也增加了成本。简单来说,就是在同步时钟的控制下,一行行地输出信息。
②CMOS的成像是一次性的。Sensor上所有的感光点会一次性接受光子,转换为电信号。这样一来,成像的速度大大提升。
当然,这还不是CCD被淘汰的主要原因。CCD之所以会被淘汰,是CMOS的集成度远大于CCD,我们都知道,手机的内部空间,寸土寸金,只要有空间,就能有别的黑科技,别的卖点,不然就只能落后。所以,当手机厂商在绞尽脑汁挤压空间的时候,CMOS自然也成为了主流。
2、外部结构区别(传感器在产品的应用结构)
① CCD输出的电信号还需要经过后续地址译码器、数模转化器、图像信号处理器处理,并且还需要提供三组不同电压的电源和同步时钟控制电路,集成度非常低。
②CMOS光电传感器可以将所有部件集成到一块芯片上,如光敏原件、图像信号放大器、信号读取电路、数模转换器、图像信号处理器及控制器等,都可以集成到一块芯片上,还具有附加DRAM的优点。
简单来说,就是CMOS的集成度更高,能够集成更多器件,适用于图像的后续处理,包括去噪、提亮等一系列算法。
这样说来,那我CCD就没有任何优点了吗?
那也不是这样说的,我们都知道,当今手机拍照对成像最大的影响就是噪声,尽管ISP中做了很多去噪工作,但是有时候对于一些低级、造价偏低的CMOS Sensor camera来说,噪声还是不可避免的。特别是在亮度过低的情况下。而CCD传感器在弱光条件下表现良好,不会像CMOS传感器那样遭受到数字噪声的影响。
手机Camera样例
那么讲了一堆,还没讲到Camera是如何成像的。。
下面我们来讲一下Camera是如何将现实世界的光转换为数字世界的信息的吧~
在这个过程中,起到最大作用的器件,有两个。
1、彩色滤光片阵列 (Color Filter Array)简称 CFA
2、感光点(Photosite)
Sensor为了捕获彩色的图像,需要一种彩色滤光片阵列(CFA)
最为常见的是拜尔滤色镜(Bayer Filter),由BGR三种原色的滤光片交替排列组成。
通常一半滤光片为绿色,而红色和蓝色各占四分之一。这是因为人眼对绿光更为敏感。
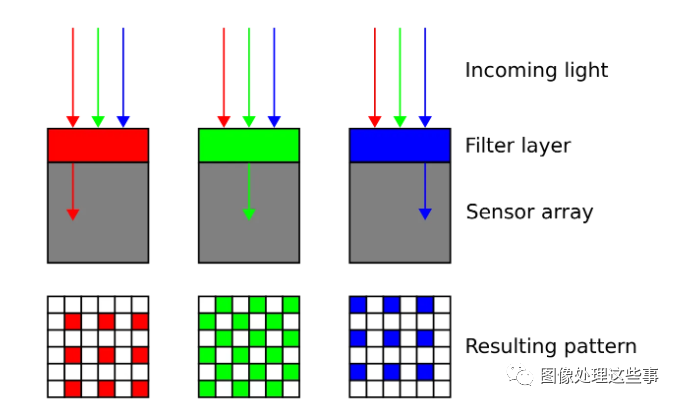
这也就是俗称的RGGB相机。
当然也能有别的滤色镜类型,就例如华为P30系列的RYYB相机。就是将绿色滤光片替换为黄色的滤光片。从而达到一个更高的进光量,提升在暗场景的拍照效果。也就是华为宣传的夜景模式。
诚然,现在很多的夜景AI算法(以后会说)。但是RYYB带来的原始亮度提升,显然是巨大的。
但是亮度提升也带来了坏处,毕竟这个世界是等价交换的,如果你还记得我前面说的,CMOS会受到数字噪声的影响,那么进光量的提升,就会带来更多的噪点,对图像的处理带来困难。
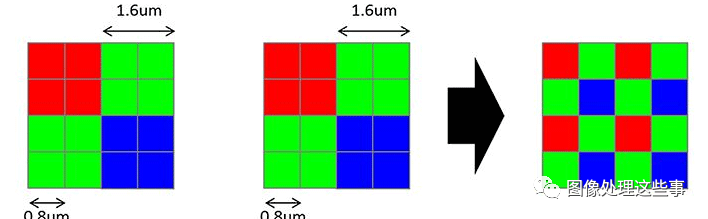
还有QCFA(Quad Bayer Filter) 。即当前的64MP Camera,由四个Bayer Filter组合而成。就是将原来的一个像素切分成四份,加上不同的滤镜。
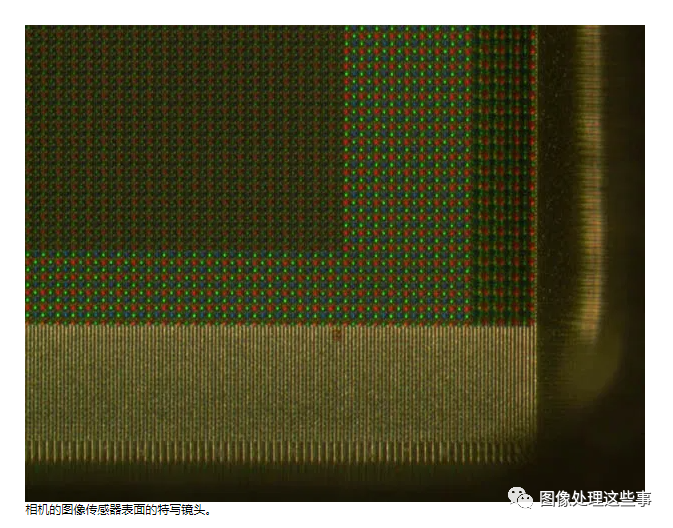
然后我们来讲一下感光点的工作:
每个传感器会有数百万甚至上千万个感光点。(当然这个感光点可以在广义上等同于像素,但是这个说法不太准确,但先按下不表)。当快门打开,传感器处在光线的照射下时,这些感光点就会尽可能地捕捉光线。而后每一个感光点捕捉的光子会被转换为电信号。而电信号的强度则与感光点所捕获的光子数量有关系。
理解这一点的最佳方式是将每个photosite/像素想象成一个桶,以收集雨水。雨水代表进入相机的光,被感光点捕获。如果将水桶一直装满到顶部,则相机的处理器会确定它是白色像素。如果存储桶为空,则为黑色像素。介于两者之间的其他任何东西都将是变化的灰色强度。
那么到这里就会有人问了,黑白灰?不是彩色的吗?对的,恭喜盲生你发现了华点。
对的,通过感光点,只会得到黑白灰的信息。
只有通过对黑白灰的像素点,进行了插值算法,也就是Demosaic(去马赛克)之后,我们才能获得彩色的图形
到这里,可能你们就会说,我们终于得到图像啦!
其实还没有,因为这正是算法的输入。
我们的Camera必须对其进行更多的处理。
接下来,sensor捕捉到的初步图像将移交至图像信号处理器(ISP)进行处理。ISP的工作,第一步就是去马赛克(demosaic)。即根据上面的RGGB信息,进行像素插值算法,获取每一个像素的像素值。
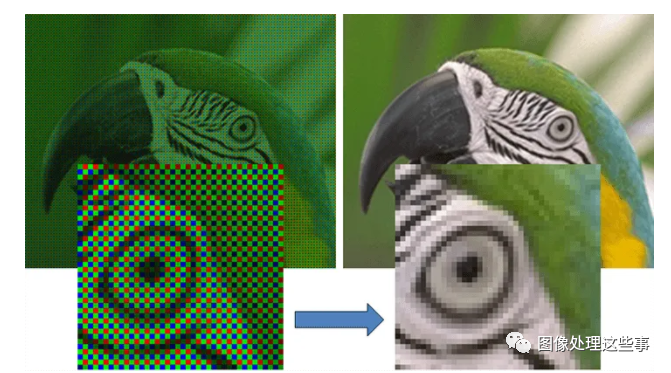
demosaic算法处理
是的,到这里,我们可以说,我们得到了图像。但并不是raw图像。
正如我说过的,ISP做了很多算法处理,图像才最终得以呈现在我们眼前。其中包括了:
降噪(denoise)、镜头阴影校正(lens shade correction)、缺陷像素校正(defect pixel correction)等一系列。
当然上述的这些都只是初步的校正工作。完成这些之后,ISP会输出“未经处理”的raw数据。而ISP还负责诸如3A算法(自动白平衡、自动对焦、自动曝光)等参数设置。并且HDR、夜景模式、EIS(电子防抖)、图像压缩等算法都是在ISP中完成的。这些以后有空再聊。
欢迎关注我的个人公众号,这里有更多好康的喔~

posted on 2022-08-13 16:15 DylanYeung 阅读(665) 评论(0) 收藏 举报

 浙公网安备 33010602011771号
浙公网安备 33010602011771号