
Dynamic Diffuse Global Illumination
介绍
https://morgan3d.github.io/articles/2019-04-01-ddgi/
![]()
![]()
![]()
![]()
![]()
![]()
![]()
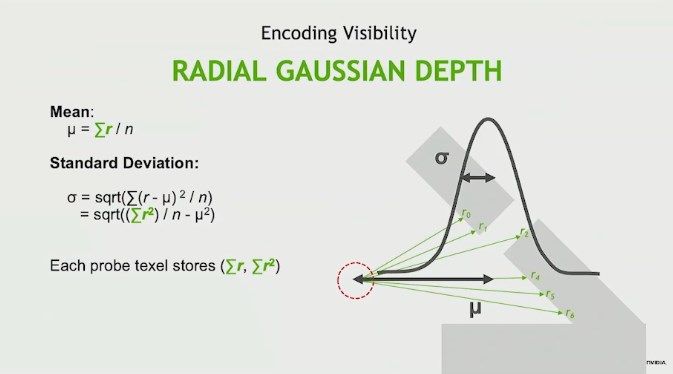
这个算法是基于irradiance probe的方法的一个改进,在原有的基础上增加了深度信息,从而避免了漏光的情况。
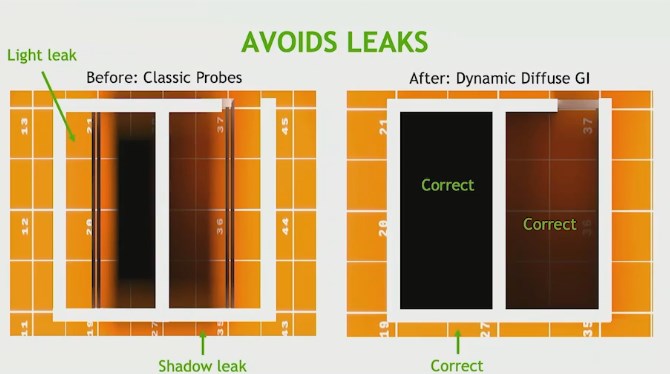
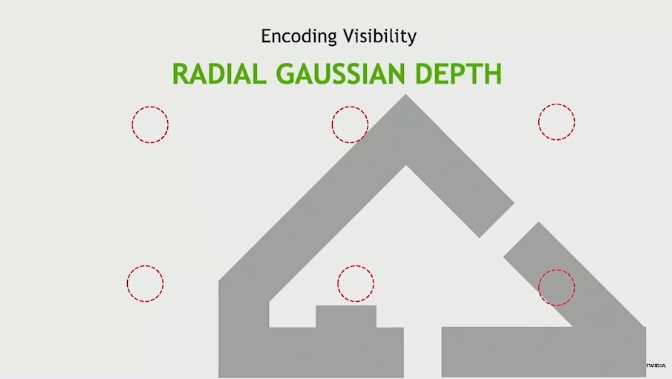
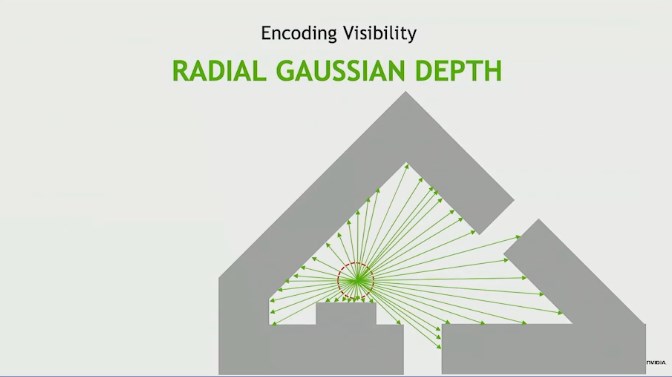
每个probe不仅保存了各个方向的光照,还存了深度。最终渲染通过查找深度图,可以用类似方差阴影图的方法得到每个probe对着色点的可见性。
步骤
算法的详细解释在这个视频里面:
算法分3步,如图:
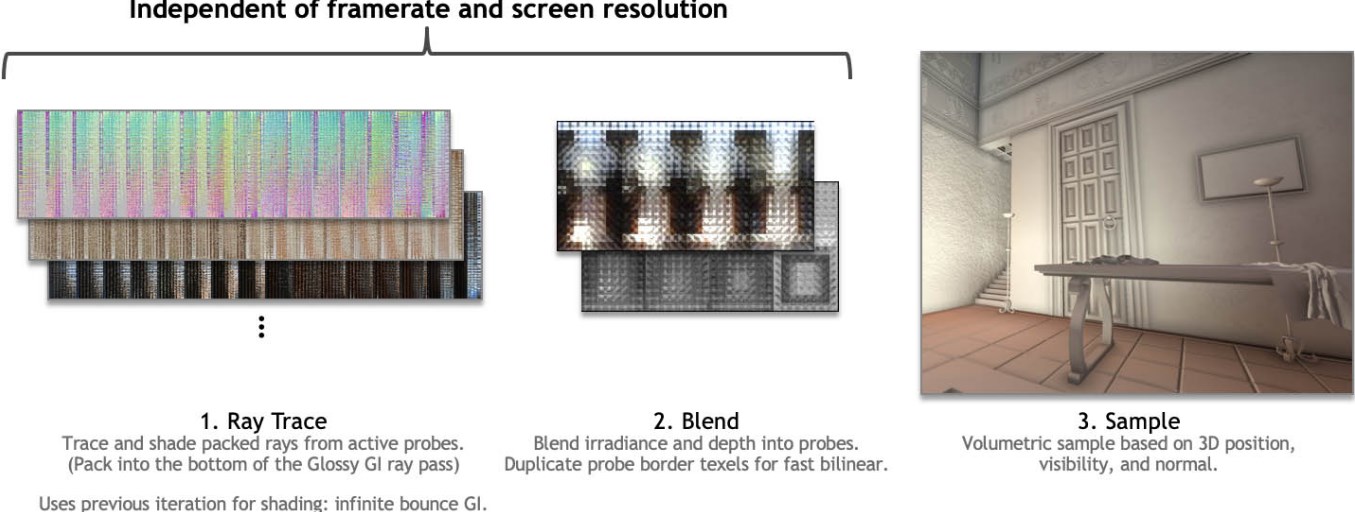
1. 用光线跟踪方法得到每个probe周围的采样信息
2. 将1的结果混合到每个probe中,更新probe的数据
这一步需要把深度的均值和方差算出来存到probe的对应像素
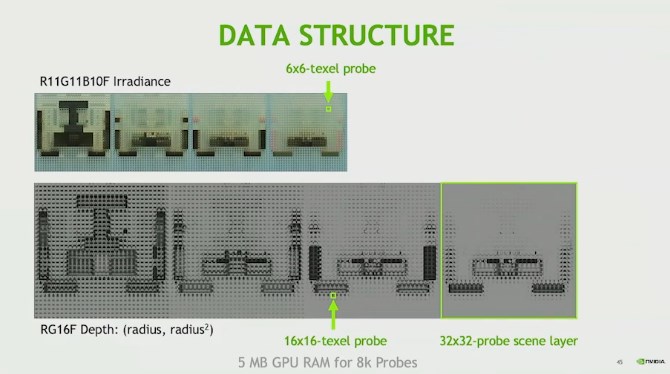
这是生成的probe数据,把每个probe的八面体贴图打包成一个大纹理。
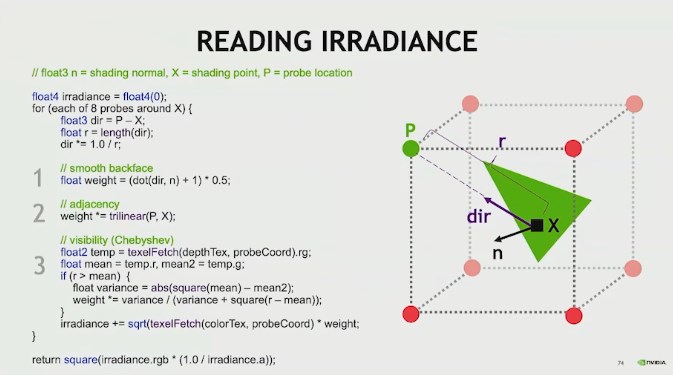
3. 对每个着色点,去查最近的8个probe,根据可见性信息得到采样权重
体会
probe存深度的方法不难想到,但是传统基于光栅化的方法生成大量低分辨率的probe效率太低。现在用光线跟踪硬件做,就可以大大提高效率,作者声称可以降到1ms以内。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号