
numpy-record
本篇只是学习NumPy时的一本记录本,仅用于本人记录不熟点和未知点,后续回顾使用。
编辑器:Jupyter Notebook
ipykernel:Python3
使用linspace/logspace生成
np.linspace(开头,结尾,数量)
linspace更适用于生成一个线性数据局(元素是等差关系)
而logspace(开头,结尾,数量,base=底数)
logspace更适用于生成一个指数函数数据(元素是等比关系)
#导入matlab的python库
import matplotlib.pyplot as plt
import numpy as np
#准备数据
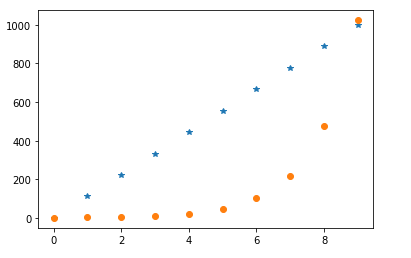
N = 10
x = np.arange(N)#x轴数据
y1 = np.linspace(0,10,N)* 100#y轴数据
y2 = np.logspace(0,10,N,base=2)#y轴数据
#创建画布
plt.figure()
#将数据画入画布
plt.plot(x, y1, '*')
plt.plot(x, y2, 'o')
#显示画布
plt.show()
矩阵元素判断
构建矩阵并进行元素判断
#创建矩阵
a = ((2,3),(3,4))
b = np.array(a,dtype=np.float32)
#创建元素判断结果矩阵,注意,矩阵在条件筛选的时候,是对矩阵中的所有元素依次比较,并将结果以布尔矩阵进行返回
r = b>3
print(r)
'''
>>
result: array([[False, False],
[False, True]])'''
将返回的布尔矩阵进行判断
#承接上述代码,我们将返回的布尔矩阵进行判断
#此处使用的是逻辑运算,any()/all() 注意:不能使用if进行判断,因为它是矩阵!!!
#any()为只要有true,就返回true
print(r.any())
>>False
#all()需要所有元素都为true,才返回true
print(r.all())
>>True
创建全0或全1矩阵
#np.zeros(维数)
#np.ones(维数)
#np.zeros/ones_like(矩阵)
print(np.ones((2,3,5)))
print('\n\n')
print(np.zeros((2,3,5)))
print(np.ones_like(np.zeros((2,3,5))))
random生成
#生成范围为0~1的连续均匀分布的随机数
np.random.rand(2,3)
#生成指定上下界的连续分布
np.random.uniform(-1,1,(2,3))
#规范点是创建一个随机数生成器,后续创建随机数时使用rng为前缀
rng = np.random.default_rng(1)
rng.uniform(low=-1,high=1,size=(3,4))
#使用生成器创建正态分布和均匀分布
#正态分布,loc分布的均值,scale分布的标准差,size输出值维度
rng.normal(loc=0.0,scale=1.0,size=(2,3))
#均匀分布,low\high为下\上界
#离散型
rng.integers(low=0,high=10,size=(2,3))
#连续性
rng.uniform(low=-1,high=10,size=(2,3))
numpy.random.shuffle(a):将数组a中的元素随机排列。numpy.random.permutation(a):将数组a中的元素随机排列,但不保持原有顺序。
将array保存为文件
# 直接将给定矩阵存为 a.npy
np.save('./data/a', np.array([[1, 2, 3], [4, 5, 6]]))
# 可以将多个矩阵存在一起,名为 `b.npz`
np.savez("./data/b", a=np.arange(12).reshape(3, 4), b=np.arange(12.).reshape(4, 3))
# 加载单个 array
np.load("data/a.npy")
# 加载多个,可以像字典那样取出对应的 array
arr = np.load("data/b.npz")
arr["a"]
arr['b']
元素统计和矩阵属性
矩阵属性
矩阵尺度
#查看矩阵维度
arr["b"].ndim
>>2
#查看矩阵每个维度的实际大小
arr['b'].shape
>>(4,3)
#矩阵元素个数
arr['b'].size
>>12
元素统计
#axis指定按行1还是列0查找符合元素
#最大数
arr['b'].max(axis = 1)
#最小数
arr['b'].min(axis = 1)
#注意:在深度学习中的很多情况下,是需要数据保持原有维度方便后续计算
#使用参数:keepdims=True来保持,不适用这个参数时,一般返回一维数据
arr['b'].min(axis = 1,keepdims=True)#保持了行维度
#或者使用amax()/amin(),来根据输入矩阵,按指定的行或列进行返回结果,但仍为一维
np.amin(arr['b'],axis=0,keepdims=True)
#中位数
np.median(arr['b'])
#分位数
#分位数是将数据分成相等部分的值,通常用于描述数据的分布情况和比较不同数据集之间的差异。
# 分位数,按行取 3/4,同时保持维度
np.quantile(arr['b'], q=0.75, axis=1, keepdims=True)
分位数解释:
分位数(Quartile)是将一组数据分成四个部分的统计量,也称为四分位数。它表示了数据的中间50%的范围,即第25个百分位数和第75个百分位数之间的值。
例如,如果一个样本有100个数据点,那么可以将它们分成四组,每组包含25个数据点。
第一组包含最小值和第二小值,第二组包含第二小值和第三小值,第三组包含中位数和第四小值,第四组包含最大值和中位数。
这四个部分分别对应着第一四分位数、第二四分位数、中位数和第三四分位数。
元素计算
#需要注意的是,以下函数都可以指定按行或列进行计算
#平均值
np.average(arr['b'],axis=1)
#求和
np.sum(arr['b'])
#累计求和
np.cumsum(arr['b'],axis=1)
#标准差
np.std(arr['b'])
#方差
np.var(arr['b'],axis=1)
形状转换
转置
#二维常用
arr.T
#三维以上
np.transpose(arr)
#当transpose指定列数交换顺序时
#如:交换2、3列元素
np.transpose(arr.reshape(4,1,3,1),axes=(0,2,1,3))
改变形状*
b = np.copy(a)
#将数据转换为一维
b.ravel()
#扩充维度
#np.expand_dims(arr,axis=(扩充列索引))
np.expand_dims(a,axis=(1,3,4))
#降低维度,注意:只能去除维度为1的
#np.squeeze(arr,axis=(降低维度索引))
#arr.reshape()
#arr.resize((),refcheck=False/True),原地变换形状,且不能使用-1.
#使用参数refcheck=False/True,用于当矩阵改变形状时
#若多于原矩阵形状,是否使用户0填充;否则会截断
分解和组合**
切片和索引
切片和索引是通过对已有 array 进行操作而得到想要的「部分」元素的行为过程。其核心动作可以概括为:按维度根据 start:stop:step 操作 array。
不进行处理的维度统一使用:或...代替,如:arr[::,-1]==arr[...,-1]
#有几行就有几个:
#比如二维的矩阵,为arr[:,:] == arr[::] == arr[:]
#:表示取连续的数据
arr[:,1]
#[,]表示取离散型的数据
arr[:,[1,2]]
拼接
np.concatenate 和 np.stack,前者是拼接,后者是堆叠(会增加一个维度),都可以指定维度。
#拼接
np.concatenate((a,b),axis=1)
>>
array([[ 0. , 111.11111111, 222.22222222, 333.33333333,
444.44444444, 0. , 111.11111111, 222.22222222,
333.33333333, 444.44444444],
[ 555.55555556, 666.66666667, 777.77777778, 888.88888889,
1000. , 555.55555556, 666.66666667, 777.77777778,
888.88888889, 1000. ]])
#堆叠
np.stack((a,b))
>>
array([[[ 0. , 111.11111111, 222.22222222, 333.33333333,
444.44444444],
[ 555.55555556, 666.66666667, 777.77777778, 888.88888889,
1000. ]],
[[ 0. , 111.11111111, 222.22222222, 333.33333333,
444.44444444],
[ 555.55555556, 666.66666667, 777.77777778, 888.88888889,
1000. ]]])
重复
也就是指定某个维度重复(或者说某个维度增加)
np.repeate(arr,dim_num,axis=)
分拆
即将矩阵的某个(axis)维度拆成dim_num份
np.split(arr, dim_num, axis=)
# (axis=1)切分行
np.split(arr, 2, axis=1)
筛选和提取**
筛选
#利用条件筛选,返回布尔矩阵
arr > 50 #返回满足条件的布尔矩阵
#将不满足条件的元素进行修改
np.where(条件, arr , 修改值)
提取
#将矩阵的元素进行提取出来
#提取符合条件的值
np.extract(条件,arr)
#提取唯一值
np.unique(arr)
抽样
rng = np.random.default_rng(42)
# 第一个参数是要抽样的集合,如果是一个整数,则表示从 0 到该值
# 第二个参数是样本大小
# 第三个参数表示结果是否可以重复
# 第四个参数表示出现的概率,长度和第一个参数一样
rng,choice(1 ,2 , 3, 4)
# 由于(0 1 2 3)中 2 和 3 的概率比较高,自然就选择了 2 和 3
rng.choice(4, 2, replace=False, p=[0.1, 0.2, 0.3, 0.4])
#旧API
data_size=
np.random.choice(data_size,50,replace=False)
最值的索引
#可选择是否按行或列排序,默认按行排序且从小到大
np.argmax/argmin(arr,axis=)
np.argsort()
算术
常见运算
#利用生成器生成测试矩阵
b_rng = np.random.default_rng(2)
b = b_rng.integers(2,20,(3,6))
#开方再平方再乘2
np.sqrt(a) ** 2 * 2
a[0,0] = 1
#对数化
np.log(a)
#超过num元素的都换成num
#np.minimum(arr,num)
np.minimum(b,7)
#小于num元素的都换成num
#np.maximum(arr,num)
np.maximum(b,7)
#四舍五入
np.round(a)
#向上取整ceil,向下取整floor
np.ceil(arr)
np.floor(arr)
#对元素进行取余
#np.mod(arr,num),num可以以动态数
广播机制
其作用于,将不同形状的矩阵按不同的形式,适配对方。
需要注意的是:广播机制要求小矩阵至少有一部分时符合大矩阵的维数。
例如,假设我们有一个形状为(3, 4)的大矩阵A和一个形状为(3, 1)的小矩阵B:
A = np.array([[1, 2, 3, 4], [5, 6, 7, 8], [9, 10, 11, 12]])
B = np.array([[2], [3], [4]])
此时NumPy会对矩阵B进行扩展:
B=[[2,2,2,2],[3,3,3,3],[4,4,4,4]]
A+B
>>
array([[ 3, 4, 5, 6],
[ 8, 9, 10, 11],
[13, 14, 15, 16]])
点积和乘积**
需要注意的是,两者都需要其符合矩阵相乘的充要条件。
#dot,向量点积
#np.dot(arr1,arr2)
np.dot(a,a.T)
#matmul,矩阵乘积
#np.matmul(arr1,arr2)
np.matmul(a,a.T)
数学角度
在高维矩阵的理解是,假设有n维矩阵,那么其元素为n-1维矩阵。
而高维矩阵相乘的理解是,将其拆分到2维矩阵,因为矩阵乘法的本质是从2维矩阵来看的,那么我们需要高维矩阵拆分为2维的矩阵进行判断是否可相乘。
#例如:a的形状为(5,2,3,4)
#b的形状为(5,4,4,2)
#其结果的矩阵形状为(5,2,3,2)
#理解:因为高维矩阵相乘需要将其拆分为2维矩阵,而2维矩阵其实就是高维矩阵形状的最后两位数,是要看它们是否满足矩阵乘法的充要条件即可。
dot和matmul函数的区别
dot函数对于高维数组时,会将其展平为一维数组,并在内部使用一维数组的运算规则来计算。因此,在使用dot时需要注意数组形状的匹配,以避免出现不符合预期的结果。
matmul函数则能够处理高维数组,并且使用矩阵乘法的规则来计算。当两个参数都是二维矩阵时,matmul函数与dot函数的行为是一致的,但是当参数是高维数组时,matmul函数会将最后两维视为矩阵,对它们进行矩阵乘法计算,并沿着其他维度进行广播。
注意:
我们需要知道的是在numpy的高维矩阵相乘中,使用matmul函数,还需要其参数两者的最外层维数需要相同,因为其维度不能改变。
dot函数常用于高维矩阵的升维。
请结合以下两个例子理解区别:
#高维矩阵中,点积将前者的一维行向量与后者的一维列向量相乘
#如下例子中:前者的每个1x3行向量与后者的列向量(3x1)相乘,得到的后者形状变为(4,6)
#并将后者作为前者的列向量的元素(5,2,x(4,6))
in:np.dot( np.ones((5, 2, 3)), np.ones((4, 3, 6)) ).shape
out:(5, 2, 4, 6)
#在高维矩阵中,使用矩阵乘法,会分解到2维向量相乘。
in:np.matmul( np.ones((4, 2, 3)), np.ones((4, 3, 6)) ).shape
out:(4, 2, 6)
其他运算
A = np.array(((1,2),(1,1)))
#内积
np.inner(A,A)
A.dot(A.T)
#点积
np.vdot(A,A)
np.sum(A*A)
#行列式
np.linalg.det(A)
#逆矩阵(方阵)
np.linalg.inv(A)
我们需要知道的是逆矩阵需要参数方阵不为奇异矩阵。
本文作者:duuuuu17
本文链接:https://www.cnblogs.com/duuuuu17/p/17366772.html
版权声明:本作品采用知识共享署名-非商业性使用-禁止演绎 2.5 中国大陆许可协议进行许可。



【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步