相位误差测量的问题
在3D测量中,光栅投影条纹是常用的技术,但是投影的条纹会有误差。
看了一些论文,相机的误差测量基本上假设相移上没有误差(也就是说投影的一个点不会跑到另一个点),但是投影该点的亮度可能受一些因素的影响,比如物体反射系数、投影仪的伽马畸变等等。例如在 Song Zhang 2007年的 Generic nonsinusoidal phase error correction for three-dimensional shape measurement using a digital video projector 中提到的在某一个条纹周期0到2\(\pi\)里的相位做统计,假设理想的相位随x方向增加为线性关系,通过逐点做差得到的相位-误差关系图如下图所示
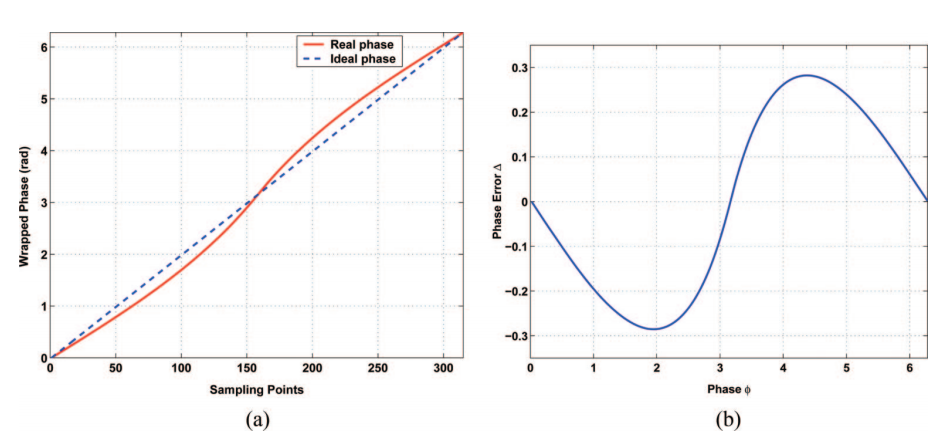
可以看到,图中误差为周期性,当然他也假设所有周期的条纹都有相同的误差,利用这个误差建立相位-误差的表LUT,在根据这个误差取补偿,补偿前后的相位误差如下图所示
但在我自己的实验里,得到的相位并不成周期性,不同条纹的误差也不相同,并且误差量级为其补偿后的量级。考虑的方向是,Zhang的实验设备是Optoma EP739投影仪和Dalsa CA-D6-0512相机,其中投影仪实际上是商用级别的投影仪,我用的是TI DLP4500和Basler acA2500-14gm相机,都是工业级设备。我认为设备的误差是绝对存在的。至于工业级和商用级设备的区别,其实是取决于实际应用场景和是何种设备的,例如投影仪,商用投影仪往往有更高的分辨率(比如Optoma EP739,10几年前的产品,分辨率达到了),但可能就存在一些误差,但工业级投影仪(例如我用的这台)分辨率可能不是很高,但误差较小。最后附我的实验结果:
拍摄的光栅图像,中间有些污点是因为感光器件被污染了,不过不影响,我按照Zhang的实验中,求的是中间10行的平均灰度
{{5.bmp(uploading...)}}
{{6.bmp(uploading...)}}
{{7.bmp(uploading...)}}
实验误差结果,数量级基本上是Zhang误差补偿以后的数量级
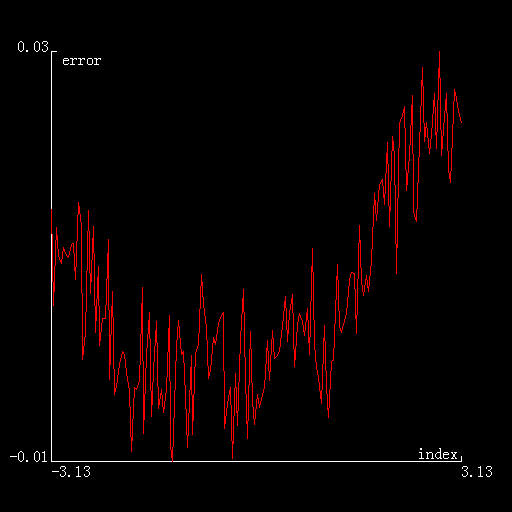
。。。图片上传失败,不知道是不是bmp和tiff的图像不能上传,改(jiang)天(cuo)修(jiu)改(cuo)一(le)下(ba)。。。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号