专家PID控制仿真学习
专家控制
学习笔记,用于记录学习
资料:《智能控制》(第四版)——刘金琨
专家系统
一、专家系统的定义
专家系统是一类包含知识和推理的智能计算机程序,其内部包含某领域专家水平的只是和经验,具有解决专门问题的能力
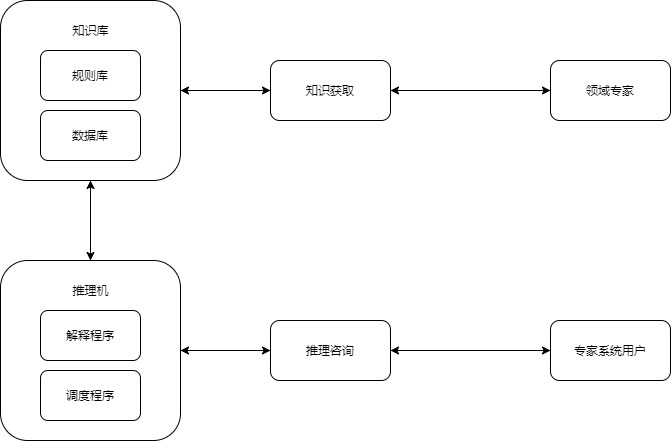
二、专家系统的构成
三、专家系统的建立
知识库包含三类知识:
- 基于专家经验的判断性规则
- 用于推理、问题求解的控制性规则
- 用于说明问题的状态、事实和概念及当前的条件和常识等的数据
推理机包括三种推理方式:
- 正向推理:从原始数据和已知条件得出结论
- 反向推理:现提出假设的理论,然后寻找支持的证据,若证据存在,则假设成立
- 双向推理:运用正向推理提出假设的结论,运用反向推理来证实假设
产生式规则的表达方式为
IF E THEN H WITH CF(E,H)
E 为规则前提条件,即证据,H 为规则的结论部分,即假设,CF为规则的强度,即可信度
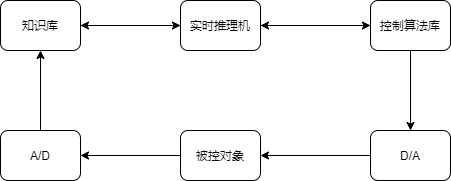
四、专家控制的基本原理
专家控制的基本结构:
与专家系统的区别
- 专家系统能完成专门领域的功能,辅助用户决策,专家控制能进行独立的、实时的自动决策。专家控制比专家系统对可靠性和抗干扰性有着更高的要求
- 专家系统处于离线工作方式,而专家控制要求在线获取反馈信息,即要求在线工作方式
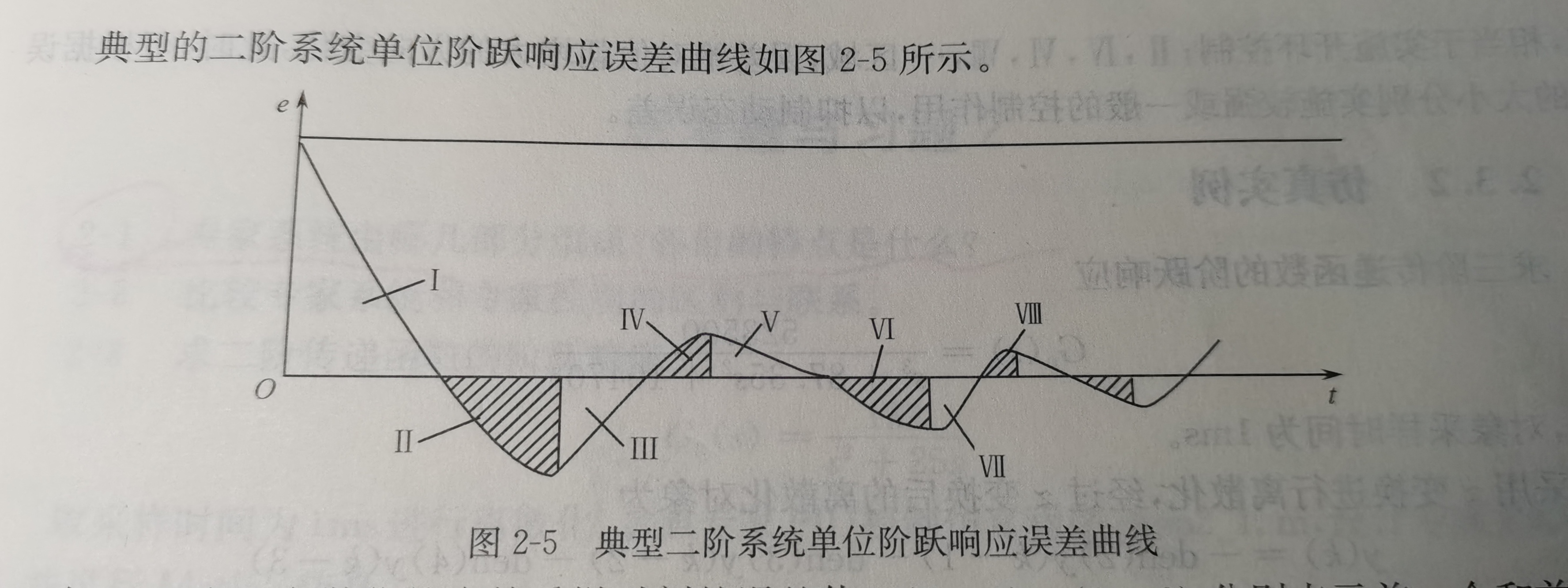
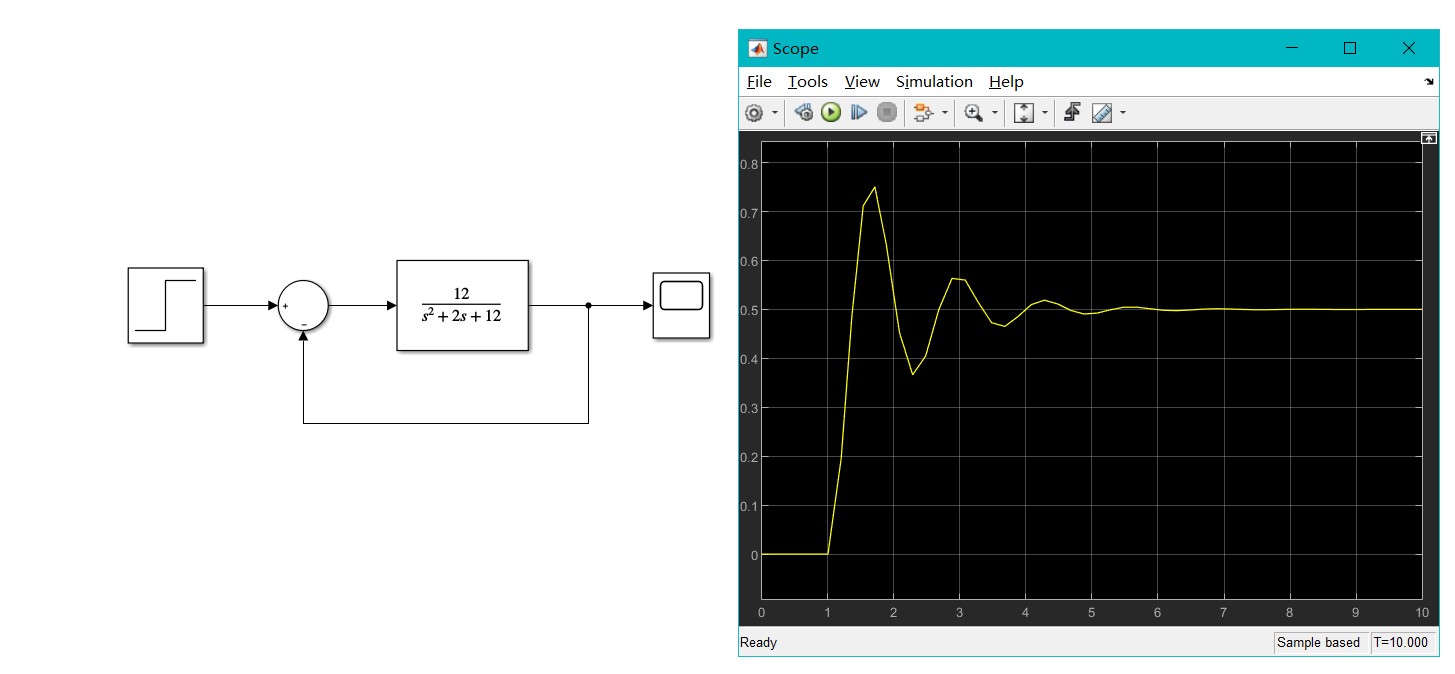
五、 分析典型二阶系统
使用simulink做一个典型二阶系统的图
书上有五个分析,分别对应例子中的规则
- |e(k)|>M1时,误差绝对值很大,应无视误差变化趋势,定值输出,是误差绝对值快速减小,同时避免超调,相当开环控制
- e(k)Δe(k)>0 或 Δe(k) = 0时,误差绝对值正在增大,或误差为定值。
a. |e(k)| ≥ M2时,误差较大,控制器输出为:

b. |e(k)| < M2 时,误差绝对值不大,但正在增大,此时控制器输出为:

- e(k)Δe(k) < 0,e(k)Δe(k-1) > 0或e(k) = 0时,误差绝对值正在减少,或达到平衡
- e(k)Δe(k) < 0,Δe(k)Δ(k-1) < 0时,误差处于极值,此时看误差绝对值,绝对值大(|e(k)| ≥ M2),就实施强控制,绝对值小(|e(k)| ≤ M2),就实施弱控制
- |e(k)| ≤ ε(精度)时,误差绝对值很小,应加入积分环节,减小稳态误差
六、仿真实例
求三阶传递函数的阶跃响应:

仿真程序:(chap2_1.m)
%专家PID控制仿真程序
clear all;
close all;
ts=0.001; %采样时间
sys=tf(5.235e005,[1,87.35,1.047e004,0]); %传递函数
dsys=c2d(sys,ts,'z'); %转化为离散系统
[num,den]=tfdata(dsys,'v'); %获取系数
u_1=0;u_2=0;u_3=0;
y_1=0;y_2=0;y_3=0;
x=[0,0,0]';
x2_1=0;
kp=0.6;
ki=0.03;
kd=0.01;
error_1=0;
for k=1:1:500
time(k)=k*ts;
r(k)=1.0;
u(k)=kp * x(1) + kd * x(2) + ki * x(3);
%规则1,当绝对值过大时定值输出小数值(强控制)
if abs(x(1))> 0.8
u(k)=0.45;
elseif abs(x(1))> 0.40
u(k)=0.40;
elseif abs(x(1))> 0.20
u(k)=0.12;
elseif abs(x(1))> 0.01
u(k)=0.10;
end
%误差绝对值正在增大,或误差为定值
if x(1) * x(2)> 0| (x(2) ==0)
if abs(x(1))>=0.05
u(k)=u_1 + 2*kp*x(1);
else
u(k)=u_1+ 0.4*kp*x(1);
end
end
%误差绝对值正在减小,货已经平衡
if (x(1)* x(2)<0&x(2)* x2_1>0)|(x(1)==0)
u(k) = u(k);
end
%误差处于极值
if x(1)*x(2)< 0&x(2)*x2_1< 0
if abs(x(1))>=0.05
u(k)=u_1 +2* kp* error_1;
else
u(k)=u_1 +0.6* kp* error_1;
end
end
%误差绝对值很小
if abs(x(1))<=0.001
u(k)=0.5* x(1)+ 0.010* x(3);
end
if u(k) >= 10
u(k) = 10;
end
if u(k) <= -10
u(k) = -10;
end
y(k) = -den(2)* y_1- den(3)* y_2- den(4)* y_3+ num(1)* u(k)+ num(2)* u_1+ num(3)* u_2+ num(4)* u_3;
error(k) = r(k)- y(k);
u_3 = u_2;u_2 = u_1;u_1 = u(k);
y_3 = y_2;y_2 = y_1;y_1 = y(k);
x(1) = error(k); %P
x2_1 = x(2);
x(2) = (error(k)- error_1)/ts; %D
x(3) = x(3)+ error(k)* ts; %I
error_1 = error(k);
end
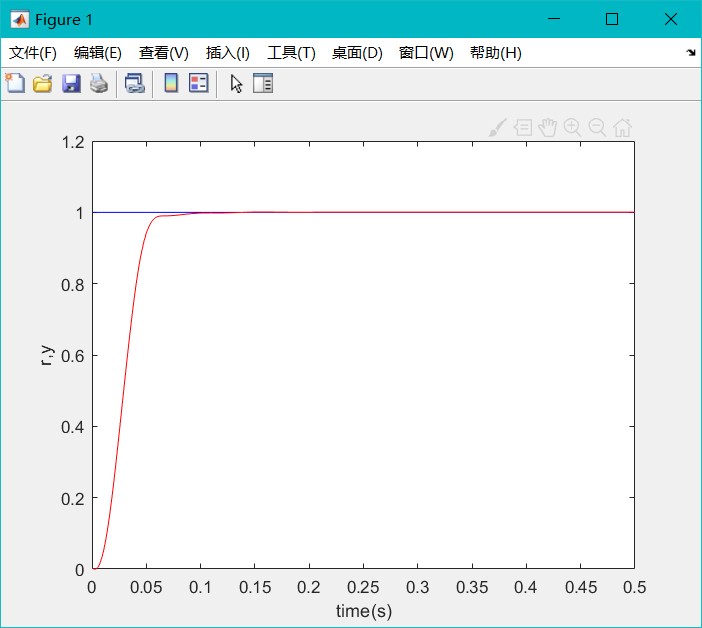
figure(1);
plot(time,r,'b',time,y,'r');
xlabel('time(s)'); ylabel('r,y');
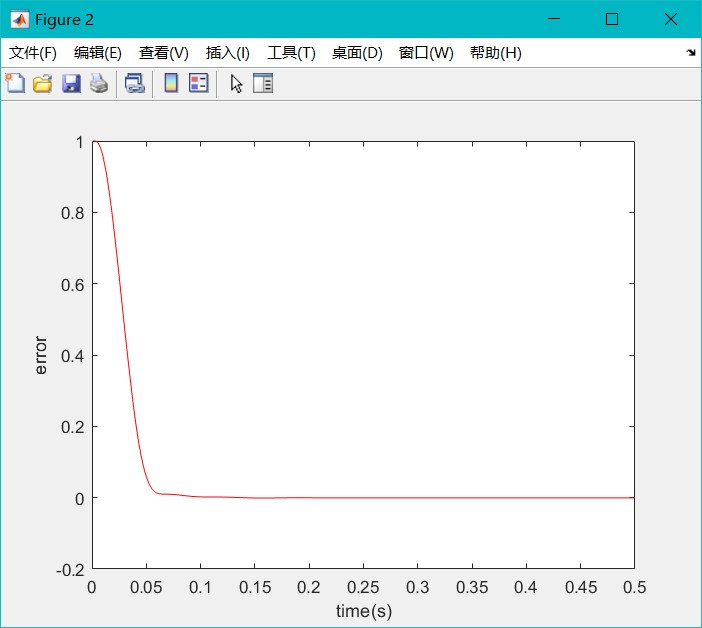
figure(2);
plot(time,r- y,'r');
xlabel('time(s)');ylabel('error');
输出结果:
作者:Dragonet-Z
出处:https://www.cnblogs.com/dragonet-Z/p/14788861.html
版权声明:本博客所有文章除特殊声明外,均遵循BY-NC-SA许可协议,转载请注明出处!

 浙公网安备 33010602011771号
浙公网安备 33010602011771号