Coursera Deep Learning笔记 卷积神经网络基础
1. 计算机视觉
使用传统神经网络处理机器视觉的一个主要问题是输入层维度很大。例如一张64x64x3的图片,神经网络输入层的维度为12288。
如果图片尺寸较大,例如一张1000x1000x3的图片,神经网络输入层的维度将达到3百万,使得网络权重W非常庞大。
这样会造成两个后果:
-
一是神经网络结构复杂,数据量相对不够,容易出现过拟合;
-
二是所需内存、计算量较大。解决这一问题的方法就是使用卷积神经网络(CNN)。
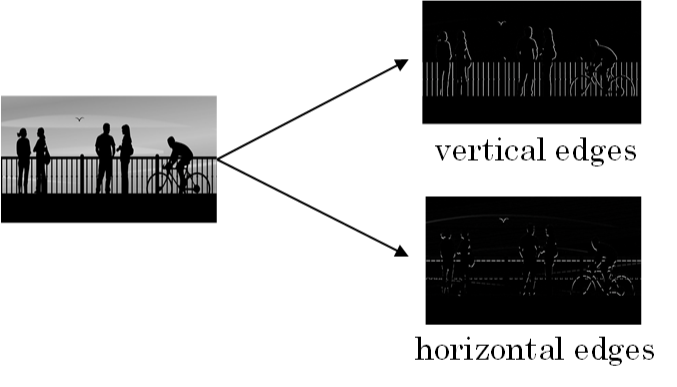
2. 边缘检测示例
神经网络由浅层到深层,分别可以检测出图片的边缘特征 、局部特征(例如眼睛、鼻子等)、整体面部轮廓。

如何检测图片的边缘:
-
垂直边缘(vertical edges)
-
水平边缘(horizontal edges)
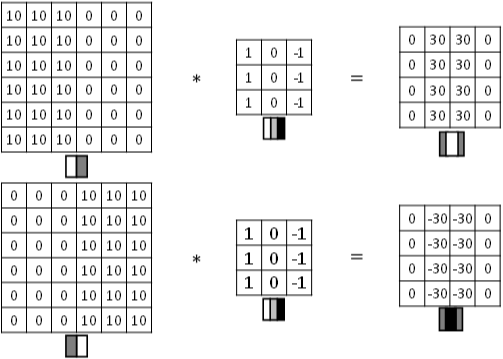
图片的边缘检测可以通过与相应滤波器进行卷积来实现。以垂直边缘检测为例,原始图片尺寸为6x6,滤波器filter尺寸为3x3,卷积后的图片尺寸为4x4,得到结果如下:
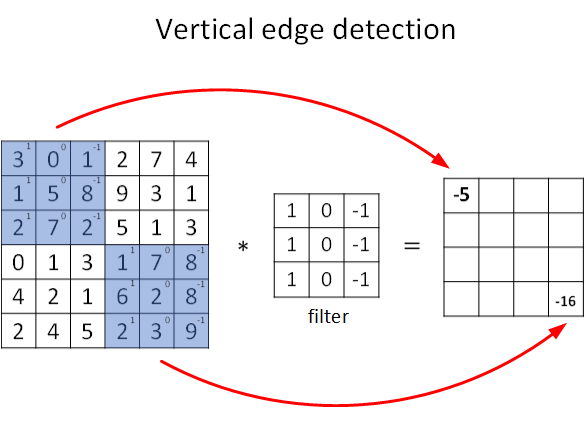
∗表示卷积操作。python中,卷积用conv_forward()表示;tensorflow中,卷积用tf.nn.conv2d()表示;keras中,卷积用Conv2D()表示。
3. 更多边缘检测内容
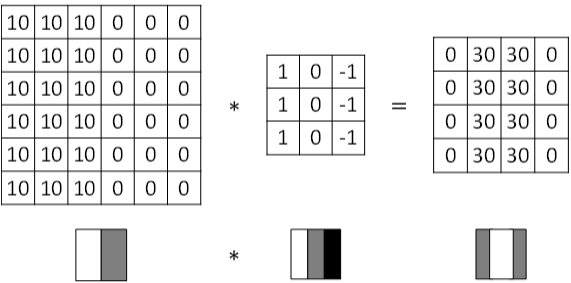
图片边缘有两种渐变方式,一种是由明变暗,另一种是由暗变明。
以垂直边缘检测为例,下图展示了两种方式的区别。实际应用中,这两种渐变方式并不影响边缘检测结果,可以对输出图片取绝对值操作,得到同样的结果。
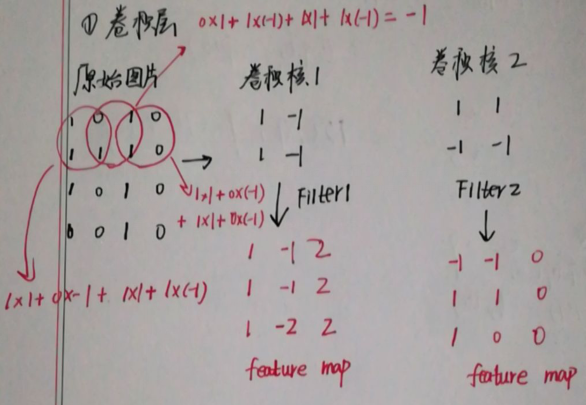
垂直边缘检测和水平边缘检测的滤波器算子如下所示:
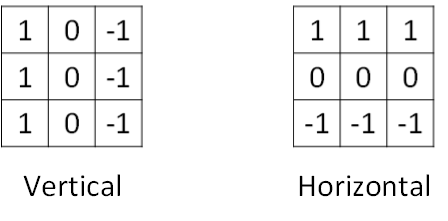
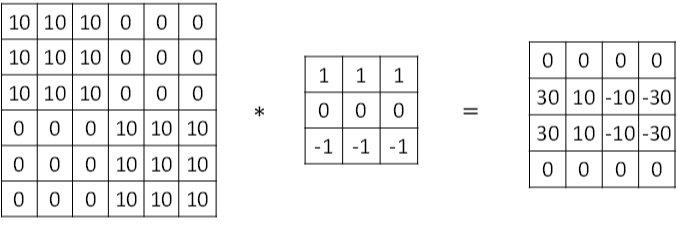
水平边缘检测:
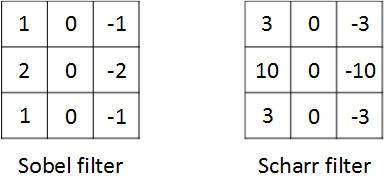
其他常用的filters,例如Sobel filter和Scharr filter。这两种滤波器的特点是:增加图片中心区域的权重。
在深度学习中,如果想检测图片的各种边缘特征,而不仅限于垂直边缘和水平边缘,那么filter的数值一般需要通过模型训练得到,类似于标准神经网络中的权重W一样由梯度下降算法反复迭代求得。
CNN的主要目的:就是计算出这些filter的数值。确定得到了这些filter后,CNN浅层网络也就实现了对图片所有边缘特征的检测。
4. Padding
如果原始图片尺寸为n x n,filter尺寸为f x f,则卷积后的图片尺寸为(n-f+1) x (n-f+1),注意f一般为奇数。出现两个问题:
-
卷积运算后,输出图片尺寸缩小
-
原始图片边缘信息对输出贡献得少,输出图片丢失边缘信息
为了解决图片缩小的问题,可以使用padding方法,即把原始图片尺寸进行扩展,扩展区域补零,用p来表示每个方向扩展的宽度。
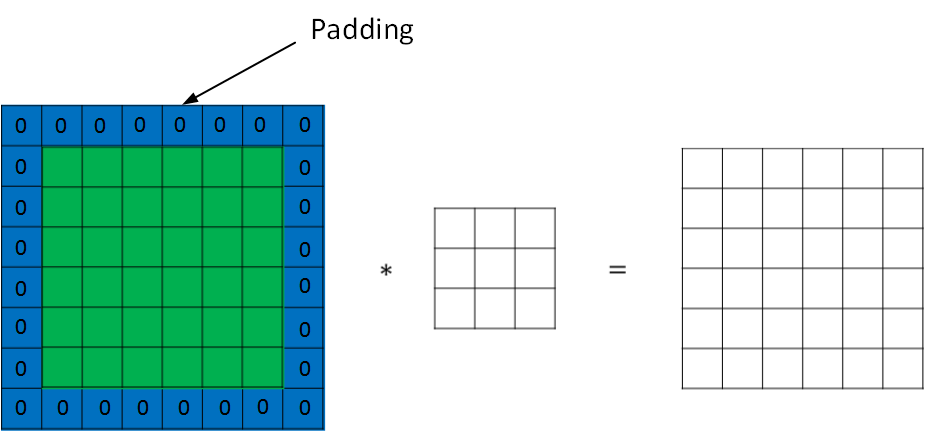
经过padding之后,原始图片尺寸为(n+2p) x (n+2p),filter尺寸为f x f,则卷积后的图片尺寸为(n+2p-f+1) x (n+2p-f+1)。
若要保证卷积前后图片尺寸不变,则p应满足:
-
没有padding操作,\(p = 0\),称之为“Valid convolutions”;
-
有padding操作,\(p = \frac{f - 1}{2}\), 称之为 "Same convolutions"
- 如果有stride为s,原尺寸为n,则推出 \(p = \frac {s \times n - n - s + f}{2}\)
5. 卷积步长(Strided Convolutions)
Stride表示filter在原图片中水平方向和垂直方向每次的步进长度。之前默认stride=1。
若stride=2,则表示filter每次步进长度为2,即隔一点移动一次。
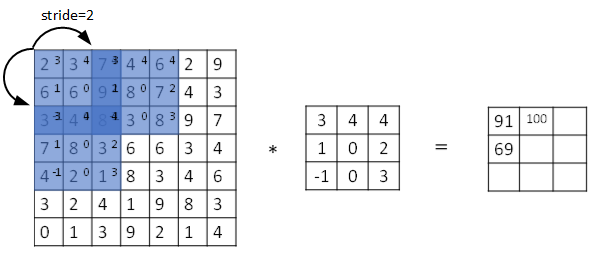
我们用s表示stride长度,p表示padding长度,如果原始图片尺寸为n x n,filter尺寸为f x f,则卷积后的图片尺寸为:
\(\lfloor ... \rfloor\) 表示向下取整.
互相关(cross-correlations)与卷积(convolutions)之间区别:
- 真正的卷积运算会先将filter绕其中心旋转180度,然后再将旋转后的filter在原始图片上进行滑动计算。filter旋转如下所示:
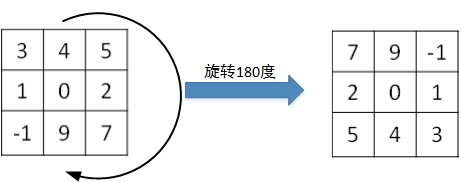
- 互相关的计算 过程则不会对filter进行旋转,而是直接在原始图片上进行滑动计算。
注意:
- 目前为止我们介绍的CNN卷积实际上计算的是互相关,而不是数学意义上的卷积。
- 为了简化计算,一般把CNN中的这种“互相关”就称作卷积运算。因为 滤波器算子 一般是水平或垂直对称的,180度旋转影响不大
- 而且最终 滤波器算子 需要通过CNN网络梯度下降算法计算得到,旋转部分可以看作是包含在CNN模型算法中。
- 总的来说,忽略旋转运算可以大大提高CNN网络运算速度,而且不影响模型性能。
- 卷积运算遵从结合律:
\[(A * B) * C = A * (B * C) \]
6. 卷积为何有效(Convolutions Over Volume)
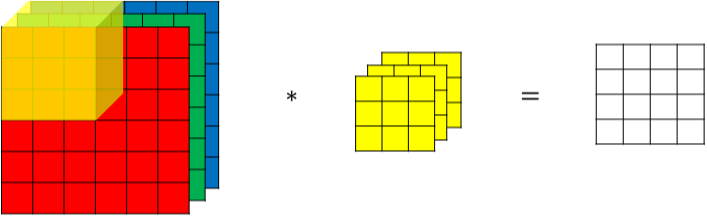
对于3通道的RGB图片,其对应的滤波器算子同样也是3通道的。例如一个图片是6 x 6 x 3,分别表示图片的高度(height)、宽度(weight)和通道(#channel)。
3通道图片的卷积运算与单通道图片的卷积运算基本一致。
- 过程是将每个单通道(R,G,B)与对应的filter进行卷积运算求和,然后再将3通道的和相加,得到输出图片的一个像素值。
不同通道的滤波算子可以不相同
- 例如R通道filter实现垂直边缘检测,G和B通道不进行边缘检测,全部置零,或者将R,G,B三通道filter全部设置为水平边缘检测。
为了进行多个卷积运算,实现更多边缘检测,可以增加更多的滤波器组。
- 例如设置第一个滤波器组实现垂直边缘检测,第二个滤波器组实现水平边缘检测。这样,不同滤波器组卷积得到不同的输出,个数由滤波器组决定。
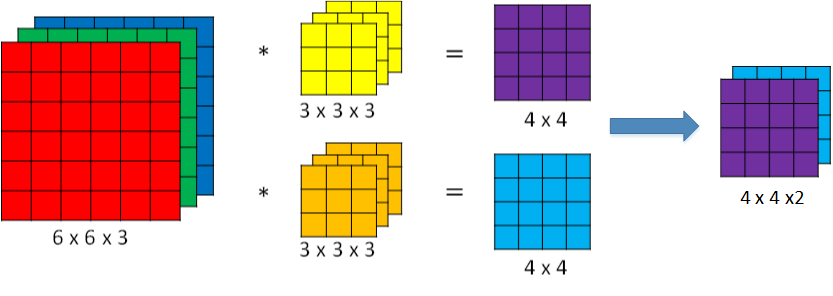
若输入图片的尺寸为 \(n \times n \times n_c\),filter尺寸为 \(f \times f \times n_c\),则卷积后图片尺寸为 \((n-f+1) \times (n-f+1) \times n_c{'}\)。其中:
-
\(n_c\):图片通道数目
-
\(n_c{'}\):为滤波器组个数
7. 单层卷积网络(One Layer of a Convolutional Network)
卷积神经网络的单层结构:
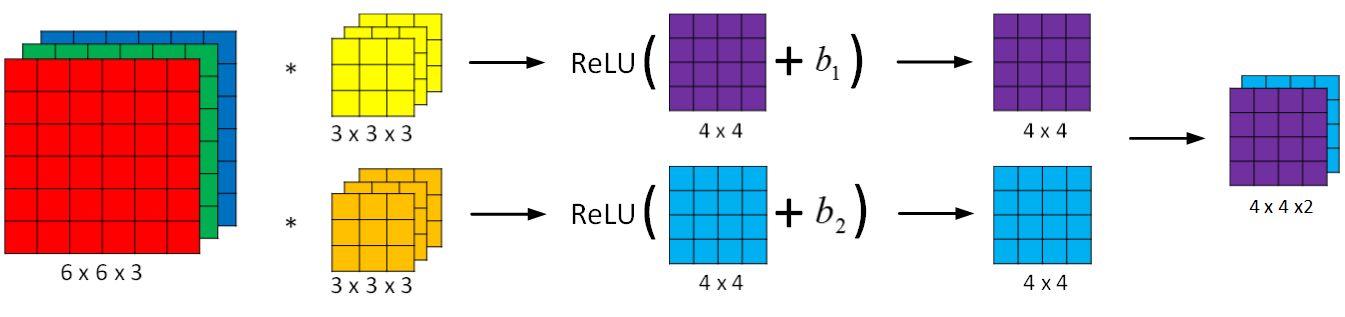
相比之前的卷积过程,CNN的单层结构多了激活函数ReLU和偏移量b。整个过程与标准的神经网络单层结构非常类似:
卷积运算对应着上式中的乘积运算,滤波器组数值对应着权重\(W^{[l]}\),激活函数为ReLU。
计算上图中参数的数目:
-
每个滤波器组有 \(3 \times 3 \times 3 = 27\) 个参数,还有 1个偏移量b,则每个滤波器组有 27 + 1 = 28个参数,两个滤波器总共 28*2 = 56个参数
-
选定滤波器后,参数数目与输入图片尺寸无关。 例如一张1000x1000x3的图片,标准神经网络输入层的维度将达到3百万,而在CNN中,参数数目只由滤波器组决定,数目相对来说要少得多,这是CNN的优势之一。
总结,CNN单层结构的所有标记符号,设层数为 \(l\):
-
\(f^{[l]} = filter size\)
-
\(p^{[l]} = padding\)
-
\(s^{[l]} = stride\)
-
\(n_c^{[l]} = number of filters\)
-
\(输入维度为: n_H^{[l-1]} \times n_W^{[l-1]} \times n_c^{[l-1]}\)
-
\(每个滤波器组维度: f^{[l]} \times f^{[l]} \times n_c^{[l-1]}\)
-
\(权重维度: f^{[l]} \times f^{[l]} \times n_c^{[l-1]} \times n_c^{[l]}\)
-
\(偏置维度: 1 \times 1 \times 1 \times n_c^{[l]}\)
-
\(输出维度: n_H^{[l]} \times n_H^{[l]} \times n_c^{[l]}\)
其中,
如果有 m 个样本,进行向量化运算,相应的输出维度为:\(m \times n_H^{[l]} \times n_W^{[l]} \times n_c^{[l]}\)
8. 简单卷积层网络示例
一个简单的CNN模型:
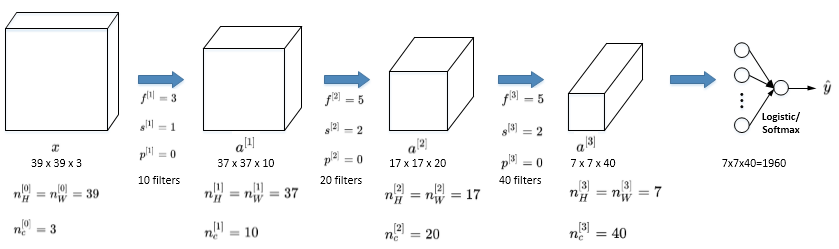
注:\(a^{[3]}\) 的维度是 7x7x40,将 \(a^{[3]}\) 排列成1列,维度1960x1,然后连接最后一级输出层。
CNN有三种类型的layer:
-
Convolution层(CONV)(卷积层)
-
Pooling层(POOL)(池化层)
-
Fully connected层(FC)(flatten层)
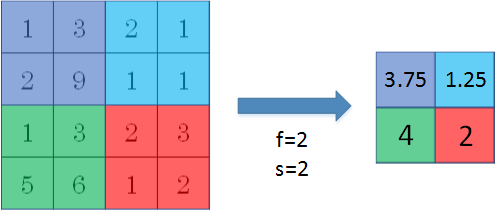
9. 池化层(Pooling Layers)
Pooling layers是CNN中用来减小尺寸,提高运算速度的,同样能减小noise影响,让各特征更具有健壮性。
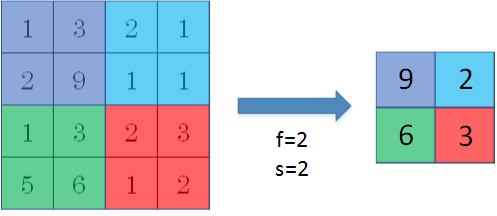
Max pooling的好处是只保留区域内的最大值(特征),忽略其它值,降低noise影响
-
max pooling需要的超参数仅为 滤波器尺寸f 和 滤波器步进长度s
-
没有其他参数需要模型训练得到,计算量很小
MaxPooling:取滑动窗口里最大的值
AveragePooling:取滑动窗口内所有值的平均值
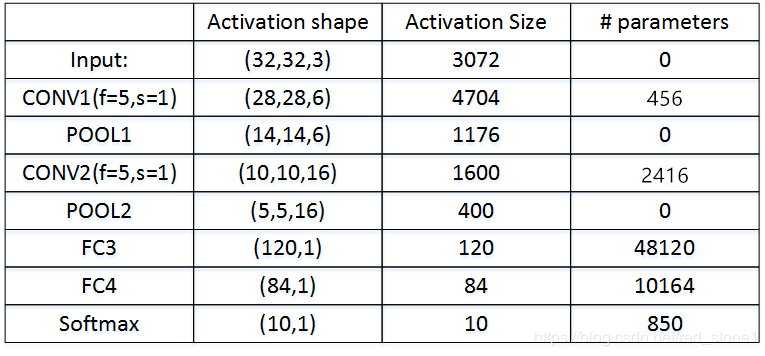
10. 卷积神经网络示例
CNN实例:

-
如图,CONV层后面紧接一个POOL层,CONV1和POOL1构成第一层,CONV2和POOL2构成第二层。
-
特别注意的是FC3和FC4为 全连接层FC,它跟标准的神经网络结构一致。
-
最后的输出层(softmax)由10个神经元构成。
整个网络各层尺寸和参数:
11. 为什么使用卷积
-
参数共享:
-
一个特征检测器(例如垂直边缘检测)对图片某块区域有用,同时也可能作用在图片其它区域。
-
连接的稀疏性:因为滤波器算子尺寸限制,每一层的每个输出只与输入部分区域内有关。
-
-
CNN参数数目较小,所需的训练样本就相对较少,从而一定程度上不容易发生过拟合现象。
-
CNN比较擅长捕捉区域位置偏移。也就是说CNN进行物体检测时,不太受物体所处图片位置的影响,增加检测的准确性和系统的健壮性。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号