码垛的运用
码垛的运用
1、导出事先保存在库文件里的东西

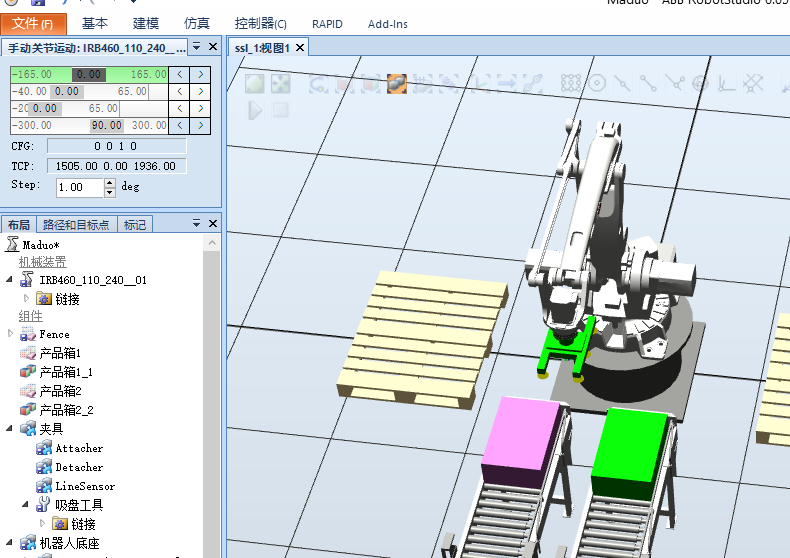
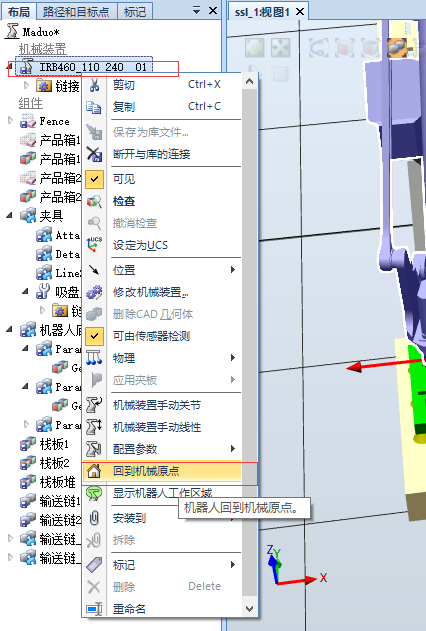
1、2机器人的选择
机器人这里我选择IRB460
在ABB模型库里
2、1编辑组件

输送链右
各组件属性的修改
Souece组件

LinearMover组件

PlaneSensor组件

逻辑运算组件

添加输入信号

输送链右组件的设计部分

输送链左
输送链左可以参考输送链右的具体方法
组件组成

Source

LinearMover

PlaneSensor

2、1、1夹具的组件
在建模里面点击Smart组件,为了后面的方便编写,可以将弄好的组件自定义一个名字,例如==夹具。

2、1、2夹具的设计

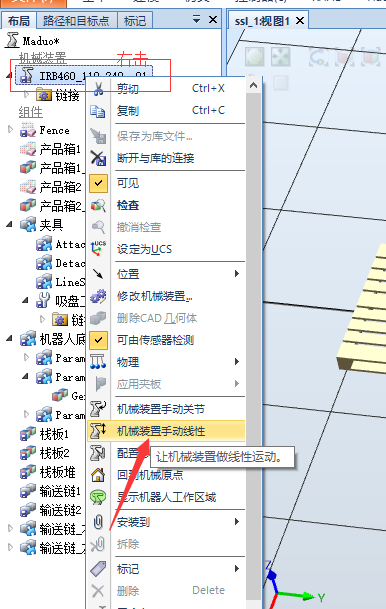
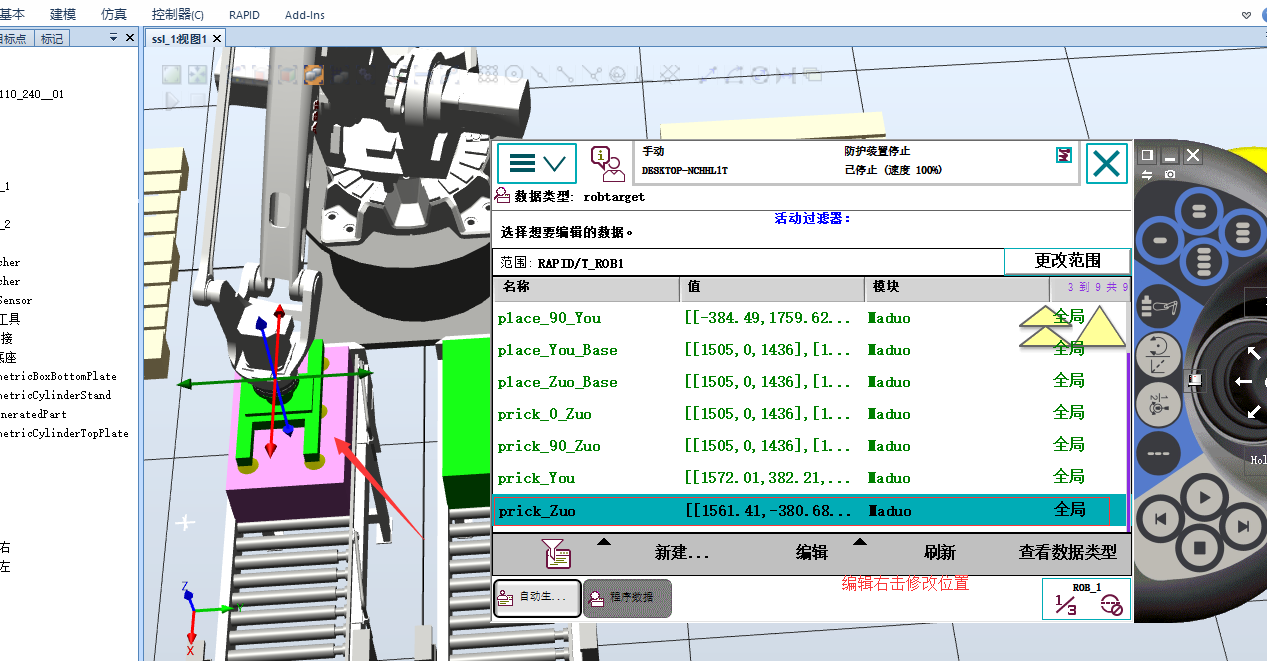
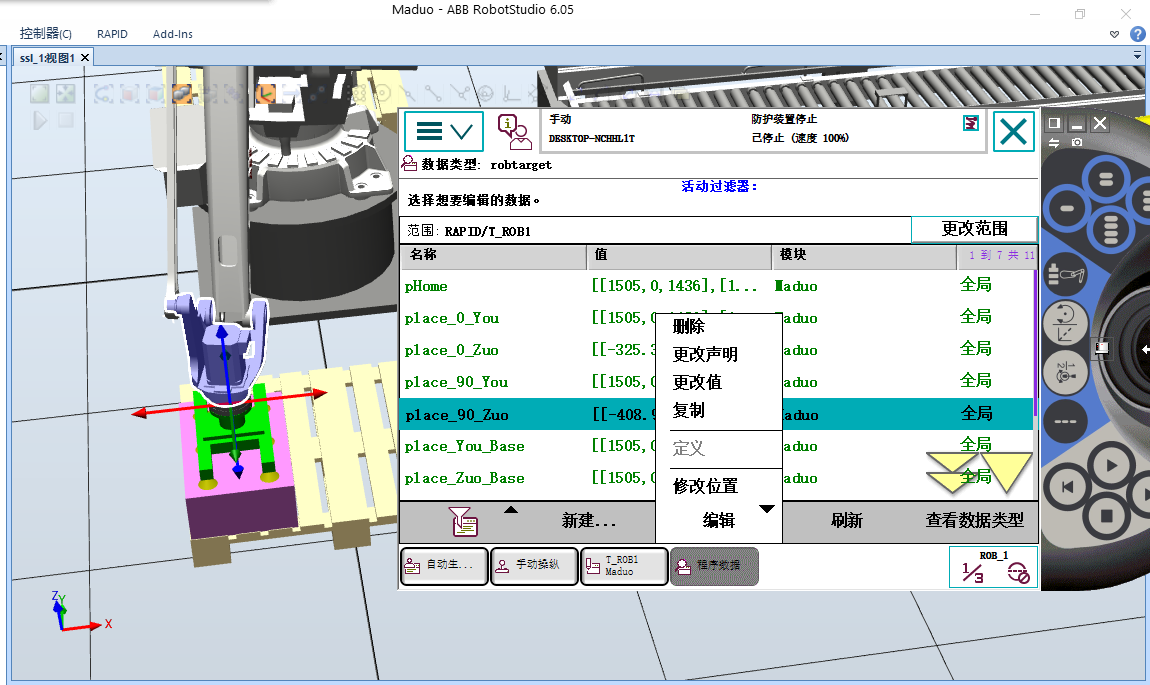
2、2示教器
组件弄好后,打开示教器
新建以下内容
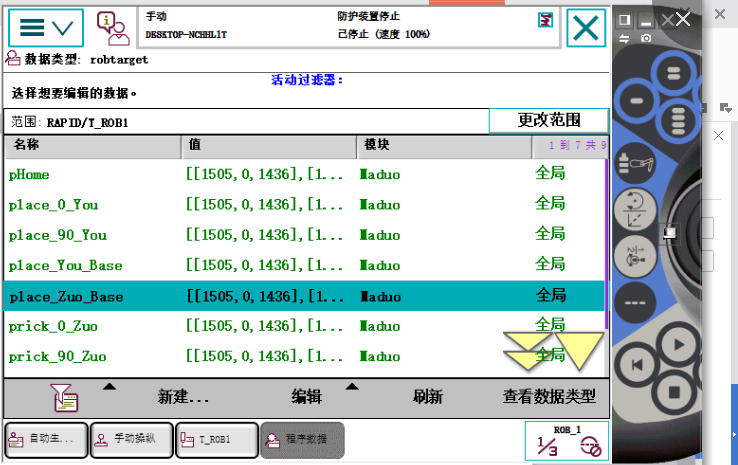
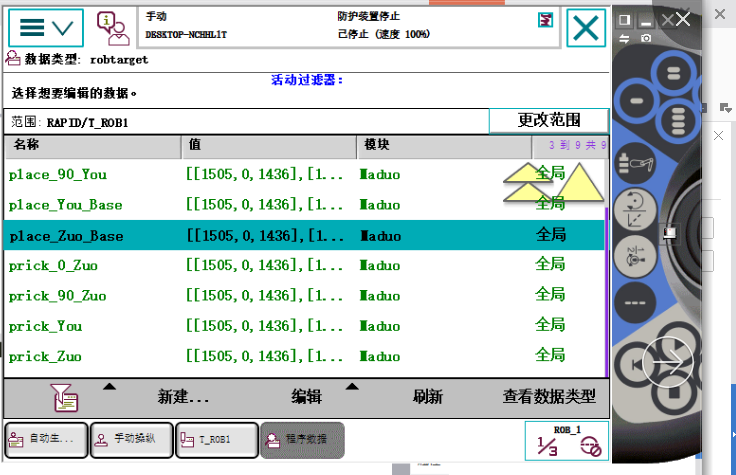
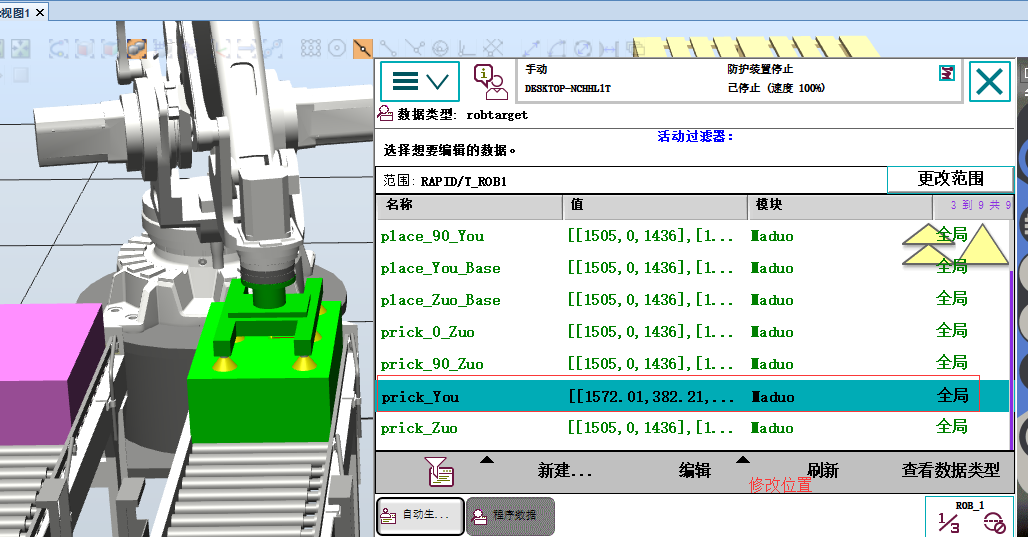
2、2、1输送链位置点
输送链右边位置
1、建立home点
2、
3、
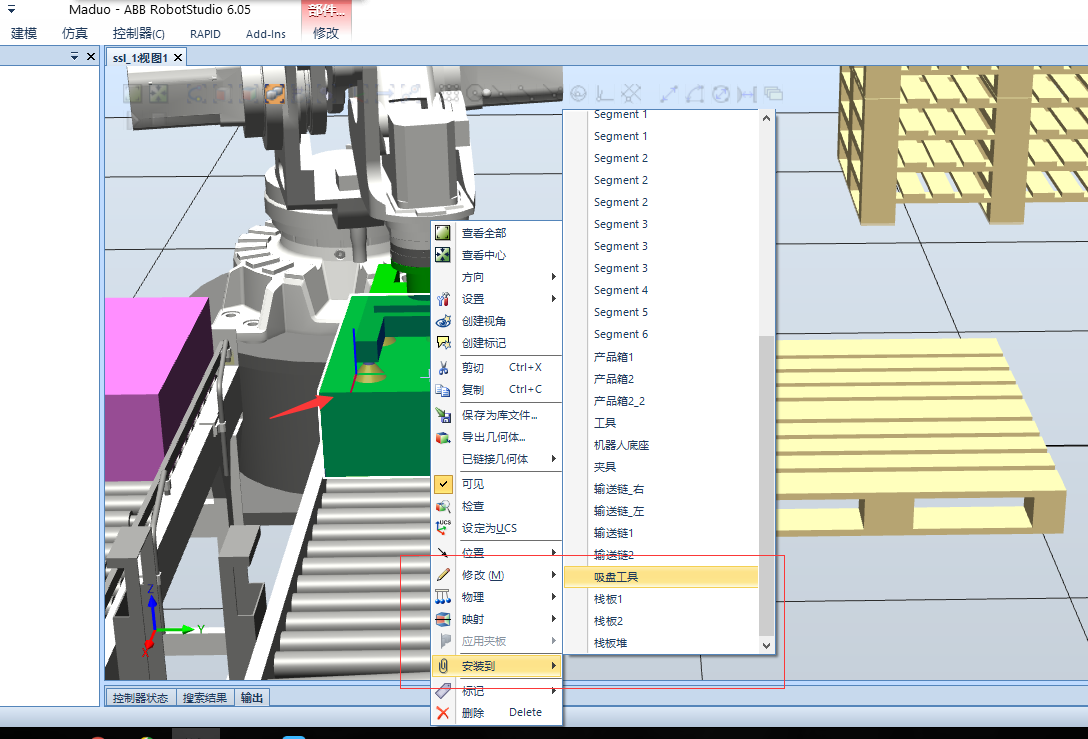
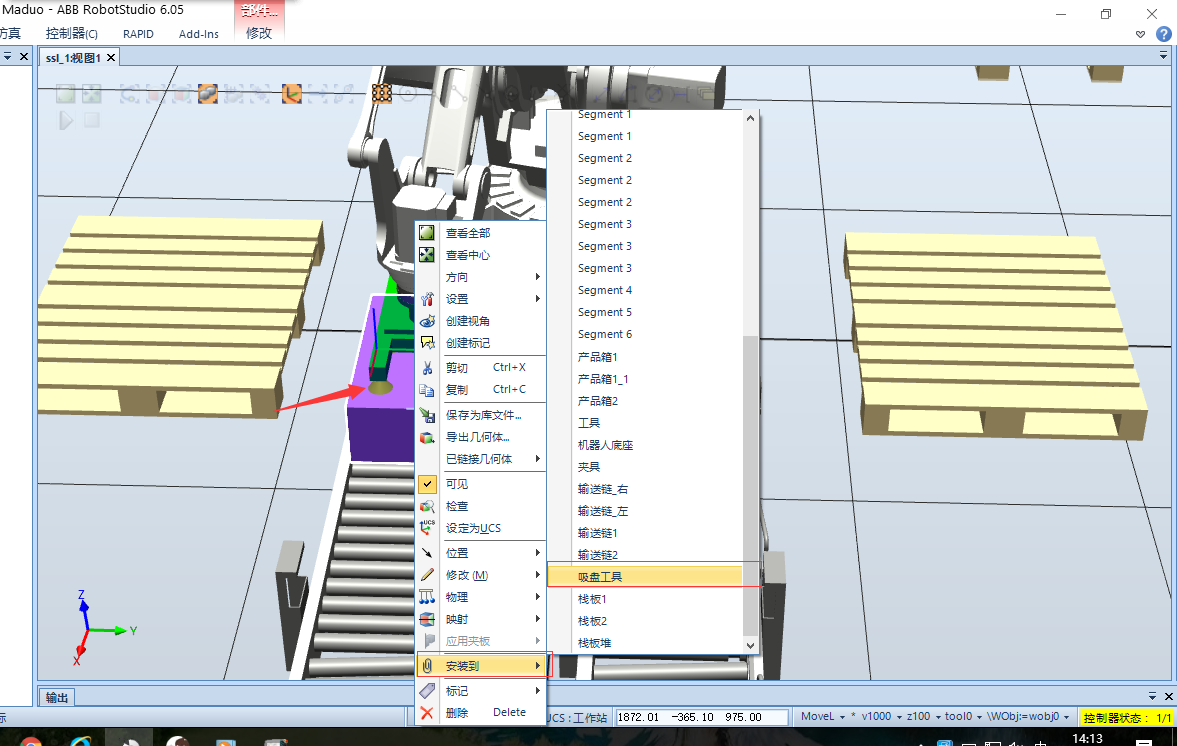
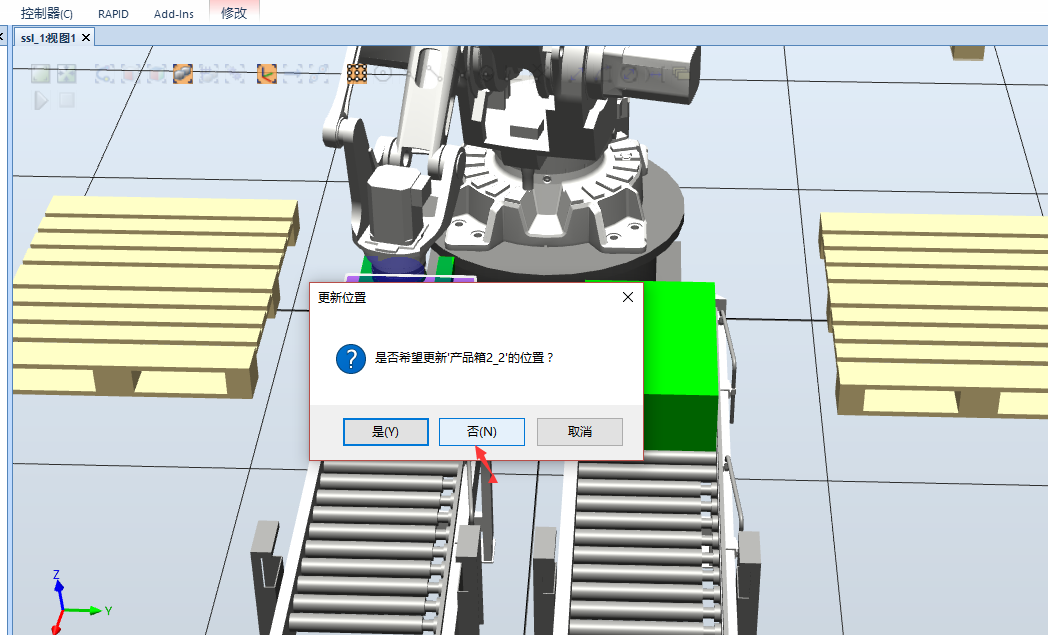
将产品箱安装到吸盘工具(不要更新位置)
4、

5、

6、将产品箱从吸盘工具拆除
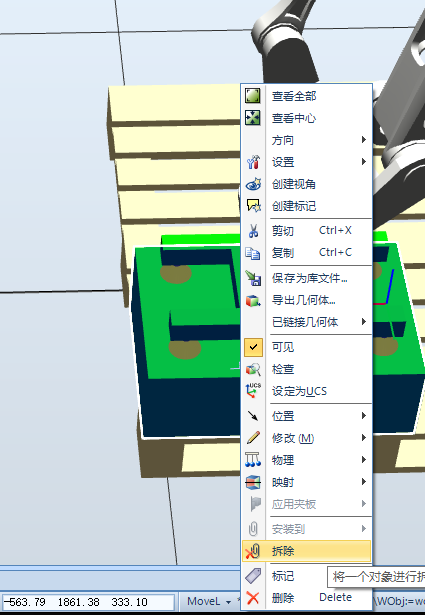
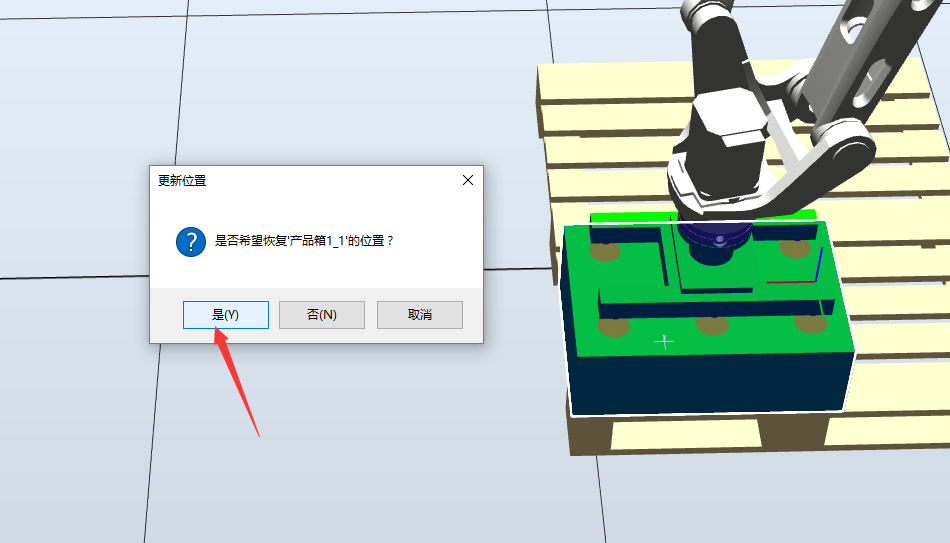
点击拆除会出现以下提示,选择是就可以了
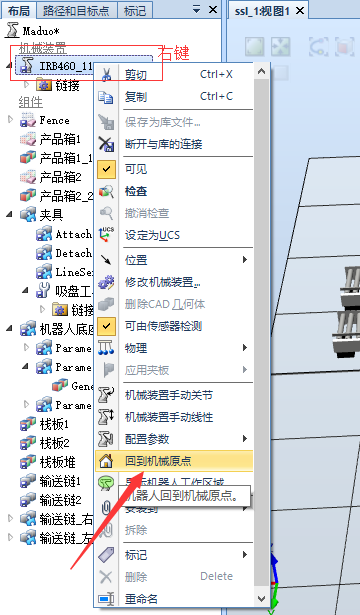
8、将机器人回到机械原点
9、
调整吸盘位置(选手动关节)
输送链左边位置
1、
2、
3、
4、

5、
6、拆除产品箱
恢复产品箱的位置,在弹出的提示中选择是
7、让机器人回到机械原点
8、隐藏产品箱

9、
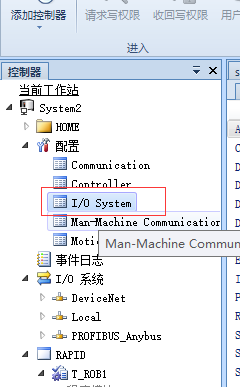
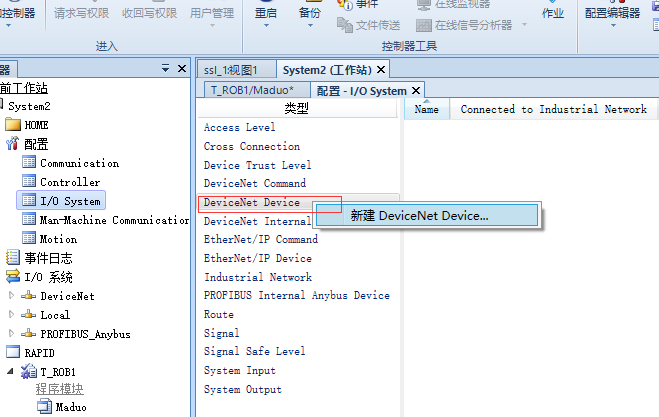
设置I/O
1、从这里双击进去
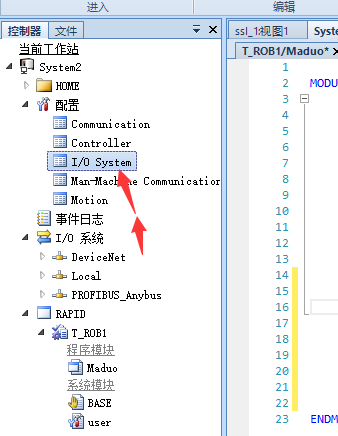
2、
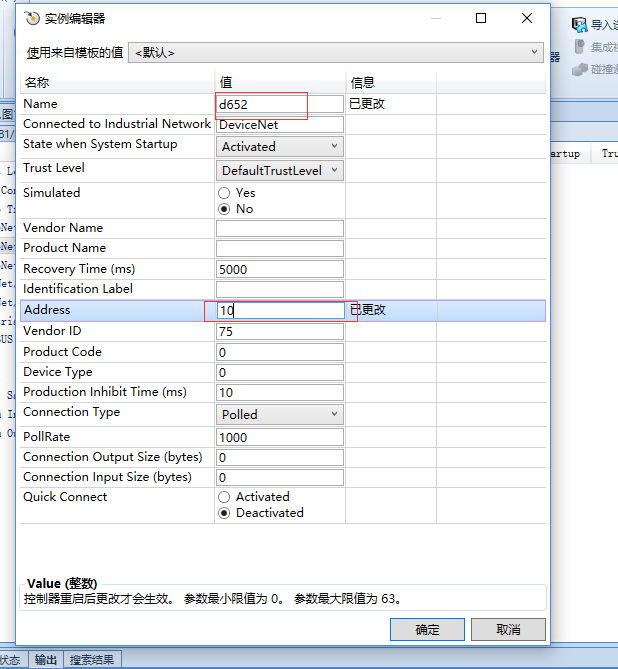
设置好的样子

Sinal(信号的设置)

全部信号设置好的样子

全部IO设置好后重启系统

程序








 浙公网安备 33010602011771号
浙公网安备 33010602011771号