【驱动】以太网扫盲(三)PHY的控制器驱动框架分析
1. 概述
PHY芯片为OSI的最底层-物理层(Physical Layer),通过MII/GMII/RMII/SGMII/XGMII等多种媒体独立接口(介质无关接口)与数据链路层的MAC芯片相连,并通过MDIO接口实现对PHY状态的监控、配置和管理。
PHY与MAC整体的大致连接框架如下(图片来源于网络):
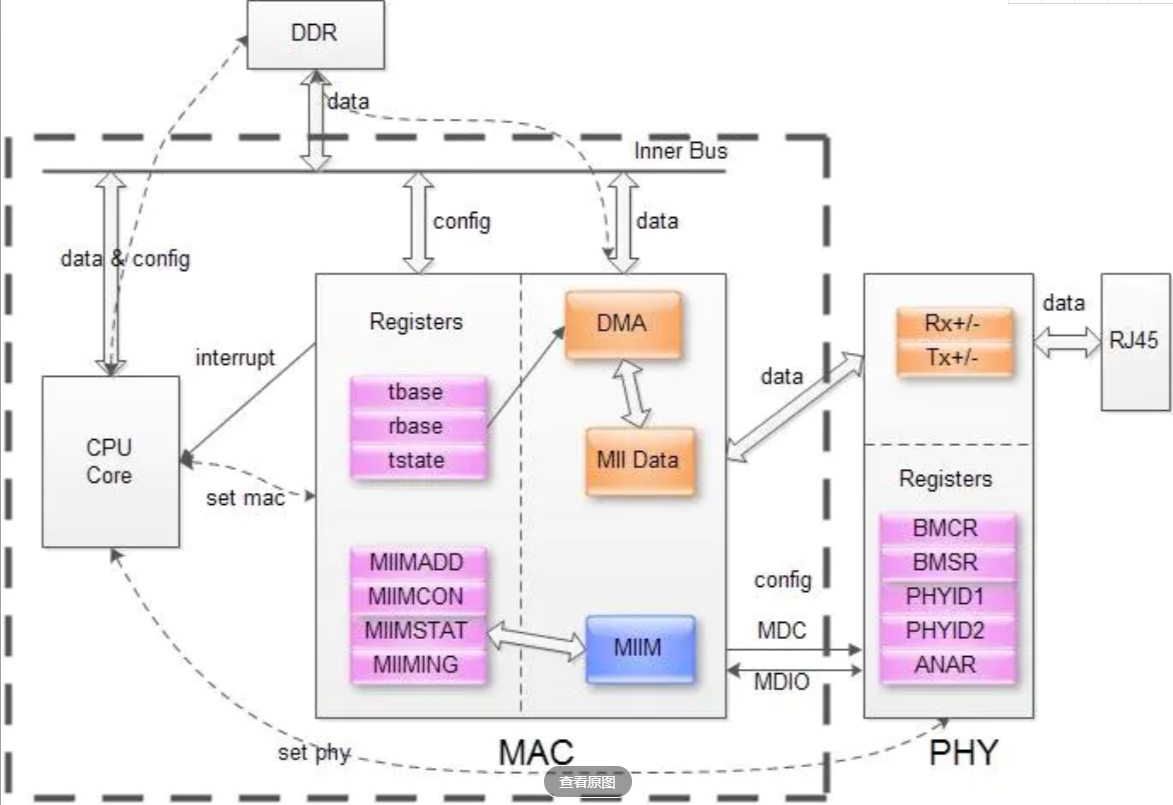
PHY的整个硬件系统组成比较复杂,PHY与MAC相连(也可以通过一个中间设备相连),MAC与CPU相连(有集成在内部的,也有外接的方式)。
PHY与MAC通过MII和MDIO/MDC相连,MII是走网络数据的,MDIO/MDC是用来与PHY的寄存器通讯的,对PHY进行配置。
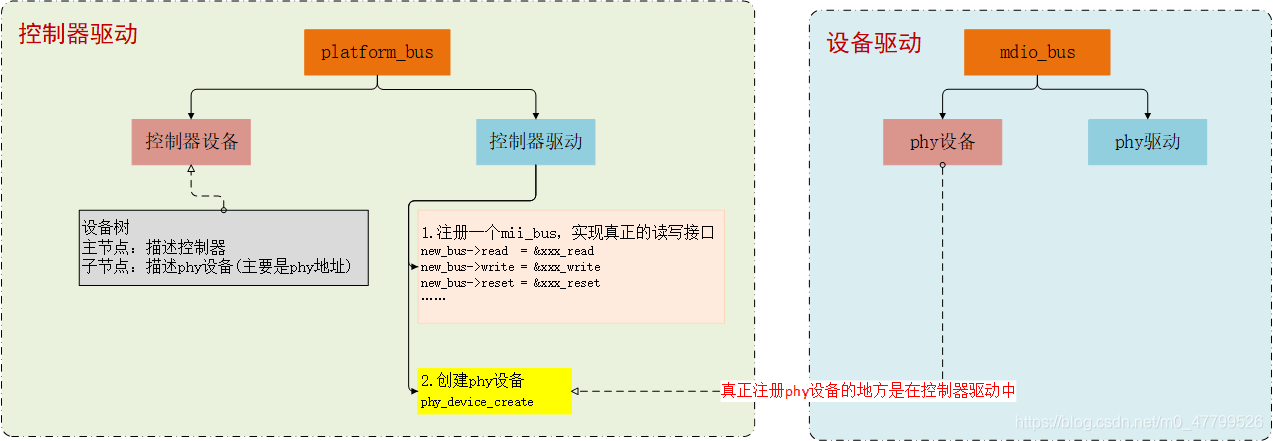
PHY的驱动与I2C/SPI的驱动一样,分为控制器驱动和设备器驱动。本节先讲控制器驱动。
2. PHY的控制器驱动总述
PHY的控制器驱动和SPI/I2C非常类似,控制器的核心功能是实现具体的读写功能。区别在于PHY的控制器读写功能的实现大致可以分为两种方式():
- 直接调用CPU的MDIO控制器(直接调用cpu对应的寄存器)的方式;
- 通过GPIO/外围soc模拟MDIO时序的方式;
PHY的控制器一般被描述为mdio_bus平台设备(注意:这是一个设备,等同于SPI/I2C中的master设备;和总线、驱动、设备中的bus不是一个概念)。
既然是平台设备,那么设备树中必定要有可以被解析为平台设备的节点,也要有对应的平台设备驱动。与SPI驱动类似,PHY设备模型也是在控制器驱动的probe函数中注册的。
3. 通过GPIO/外围soc模拟MDIO时序的方式
3.1 控制器平台设备在设备树中的大致描述方式(不完全准确,主要描述匹配的规则)
# linux-4.9.225\Documentation\devicetree\bindings\soc\fsl\cpm_qe\network.txt
* MDIO
Currently defined compatibles: fsl,pq1-fec-mdio (reg is same as first resource of FEC device) fsl,cpm2-mdio-bitbang (reg is port C registers)
Properties for fsl,cpm2-mdio-bitbang:
fsl,mdio-pin : pin of port C controlling mdio data
fsl,mdc-pin : pin of port C controlling mdio clock
Example: mdio@10d40 {
compatible = "fsl,mpc8272ads-mdio-bitbang",
"fsl,mpc8272-mdio-bitbang",
"fsl,cpm2-mdio-bitbang";
reg = <10d40 14>;
#address-cells = <1>;
#size-cells = <0>;
fsl,mdio-pin = <12>;
fsl,mdc-pin = <13>;
# linux-4.9.225\Documentation\devicetree\bindings\phy
xxx_phy: xxx-phy@xxx { //描述控制器下挂PHY设备的节点
reg = <0x0>; //PHY的地址
};
};
3.2 控制器平台驱动代码走读
3.2.1 控制器平台驱动的注册
static const struct of_device_id fs_enet_mdio_bb_match[] = {
{
.compatible = "fsl,cpm2-mdio-bitbang", //匹配平台设备的名称
},
{},
};
MODULE_DEVICE_TABLE(of, fs_enet_mdio_bb_match);
static struct platform_driver fs_enet_bb_mdio_driver = {
.driver = {
.name = "fsl-bb-mdio",
.of_match_table = fs_enet_mdio_bb_match,
},
.probe = fs_enet_mdio_probe,
.remove = fs_enet_mdio_remove,
};
module_platform_driver(fs_enet_bb_mdio_driver); //注册控制器平台设备驱动
3.2.2 控制器平台驱动的probe函数走读
/**********************************************************************************************
通过GPIO/外围soc模拟MDIO时序方式的MDIO驱动(probe函数中完成PHY设备的创建和注册)
***********************************************************************************************/
# linux-4.9.225\drivers\net\ethernet\freescale\fs_enet\mii-bitbang.c
fs_enet_mdio_probe(struct platform_device *ofdev)
|--- bitbang = kzalloc(sizeof(struct bb_info), GFP_KERNEL)
|
|--- bitbang->ctrl.ops = &bb_ops ----------------------------------------------->| static struct mdiobb_ops bb_ops = {
| | .owner = THIS_MODULE,
| | .set_mdc = mdc,
| | .set_mdio_dir = mdio_dir,
| | .set_mdio_data = mdio, |-->实现为GPIO的读写
| | .get_mdio_data = mdio_read,
| | };
| \<---------------------------------------------------------|
|--- new_bus = alloc_mdio_bitbang(&bitbang->ctrl) |
| |--- bus = mdiobus_alloc() -----------| | struct mdiobb_ctrl *ctrl = bus->priv| |
| |--- bus->read = mdiobb_read -----------| | ctrl->ops->set_mdc | |
| |--- bus->write = mdiobb_write -----------|--mdiobb_read/mdiobb_write/mdiobb_reset函数的实现 -| ctrl->ops->set_mdio_dir |--|
| |--- bus->reset = mdiobb_reset -----------| / | ctrl->ops->set_mdio_data |
| |--- bus->priv = ctrl <---------------------------- | ctrl->ops->get_mdio_data |
|
|--- fs_mii_bitbang_init //设置用来模拟mdc和mdio的管脚资源
| |--- of_address_to_resource(np, 0, &res) //转换设备树地址并作为资源返回,设备树中指定
| |
| |--- snprintf(bus->id, MII_BUS_ID_SIZE, "%x", res.start) //把资源的起始地址设置为bus->id
| |
| |--- data = of_get_property(np, "fsl,mdio-pin", &len)
| |--- mdio_pin = *data //决定控制mdio数据的端口的引脚
| |
| |--- data = of_get_property(np, "fsl,mdc-pin", &len)
| |--- mdc_pin = *data //控制mdio时钟的端口引脚
| |
| |--- bitbang->dir = ioremap(res.start, resource_size(&res))
| |
| |--- bitbang->dat = bitbang->dir + 4
| |--- bitbang->mdio_msk = 1 << (31 - mdio_pin)
| |--- bitbang->mdc_msk = 1 << (31 - mdc_pin)
|
|--- of_mdiobus_register(new_bus, ofdev->dev.of_node) //注册mii_bus设备,并通过设备树子节点创建PHY设备 <===of_mdiobus_register(struct mii_bus *mdio, struct device_node *np)
| |--- mdio->phy_mask = ~0 //屏蔽所有PHY,防止自动探测。相反,设备树中列出的phy将在总线注册后填充
| |--- mdio->dev.of_node = np
| |--- mdiobus_register(mdio) //@注意@ 注册MDIO总线设备(注意是总线设备不是总线,因为总线也是一种设备。mdio_bus是在其他地方注册的,后面会讲到)
| | |--- __mdiobus_register(bus, THIS_MODULE)
| | | |--- bus->owner = owner
| | | |--- bus->dev.parent = bus->parent
| | | |--- bus->dev.class = &mdio_bus_class
| | | |--- bus->dev.groups = NULL
| | | |--- dev_set_name(&bus->dev, "%s", bus->id) //设置总线设备的名称
| | | |--- device_register(&bus->dev) //注册总线设备
| |
| |--- for_each_available_child_of_node(np, child) //遍历这个平台设备的子节点并为每个phy注册一个phy_device
| |--- addr = of_mdio_parse_addr(&mdio->dev, child) //从子节点的"reg"属性中获得PHY设备的地址
| | |--- of_property_read_u32(np, "reg", &addr)
| |--- if (addr < 0) //如果未获得子节点的"reg"属性,则在后面再启用扫描可能存在的PHY的,然后注册
| | |--- scanphys = true
| | |--- continue
| |
| |--- of_mdiobus_register_phy(mdio, child, addr) //创建并注册PHY设备
| | |--- is_c45 = of_device_is_compatible(child,"ethernet-phy-ieee802.3-c45") //判断设备树中的PHY的属性是否指定45号条款
| | |
| | |--- if (!is_c45 && !of_get_phy_id(child, &phy_id)) //如果设备树中的PHY的属性未指定45号条款 且未通过"ethernet-phy-id%4x.%4x"属性指定PHY的ID
| | | |---phy_device_create(mdio, addr, phy_id, 0, NULL)
| | |---else //我这里采用的是else分支
| | | |---phy = get_phy_device(mdio, addr, is_c45) //在@bus上的@addr处读取PHY的ID寄存器,然后分配并返回表示它的phy_device
| | | |--- get_phy_id(bus, addr, &phy_id, is_c45, &c45_ids) //通过mdio得到PHY的ID
| | | |--- phy_device_create(bus, addr, phy_id, is_c45, &c45_ids) //创建PHY设备
| | | |--- struct phy_device *dev
| | | |--- struct mdio_device *mdiodev
| | | |--- dev = kzalloc(sizeof(*dev), GFP_KERNEL)
| | | |--- mdiodev = &dev->mdio //mdiodev是最新的内核引入,较老的版本没有这个结构
| | | |--- mdiodev->dev.release = phy_device_release
| | | |--- mdiodev->dev.parent = &bus->dev
| | | |--- mdiodev->dev.bus = &mdio_bus_type //PHY设备和驱动都会挂在mdio_bus下,匹配时会调用对应的match函数 ---|
| | | |--- mdiodev->bus = bus |
| | | |--- mdiodev->pm_ops = MDIO_BUS_PHY_PM_OPS |
| | | |--- mdiodev->bus_match = phy_bus_match //真正实现PHY设备和驱动匹配的函数<--------------------------------|
| | | |--- mdiodev->addr = addr
| | | |--- mdiodev->flags = MDIO_DEVICE_FLAG_PHY
| | | |--- mdiodev->device_free = phy_mdio_device_free
| | | |--- diodev->device_remove = phy_mdio_device_remove
| | | |--- dev->speed = SPEED_UNKNOWN
| | | |--- dev->duplex = DUPLEX_UNKNOWN
| | | |--- dev->pause = 0
| | | |--- dev->asym_pause = 0
| | | |--- dev->link = 1
| | | |--- dev->interface = PHY_INTERFACE_MODE_GMII
| | | |--- dev->autoneg = AUTONEG_ENABLE //默认支持自协商
| | | |--- dev->is_c45 = is_c45
| | | |--- dev->phy_id = phy_id
| | | |--- if (c45_ids)
| | | | |--- dev->c45_ids = *c45_ids
| | | |--- dev->irq = bus->irq[addr]
| | | |--- dev_set_name(&mdiodev->dev, PHY_ID_FMT, bus->id, addr)
| | | |--- dev->state = PHY_DOWN //指示PHY设备和驱动程序尚未准备就绪,在PHY驱动的probe函数中会更改为READY
| | | |--- INIT_DELAYED_WORK(&dev->state_queue, phy_state_machine) //PHY的状态机(核心WORK)
| | | |--- INIT_WORK(&dev->phy_queue, phy_change) //由phy_interrupt / timer调度以处理PHY状态的更改
| | | |--- request_module(MDIO_MODULE_PREFIX MDIO_ID_FMT, MDIO_ID_ARGS(phy_id))//加载内核模块(这里没有细致研究过)
| | | |--- device_initialize(&mdiodev->dev) //设备模型中的一些设备,主要是kset、kobject、ktype的设置
| | |
| | |--- irq_of_parse_and_map(child, 0) //将中断解析并映射到linux virq空间(未深入研究)
| | |--- if (of_property_read_bool(child, "broken-turn-around"))//MDIO总线中的TA(Turnaround time)
| | | |--- mdio->phy_ignore_ta_mask |= 1 << addr
| | |
| | |--- of_node_get(child)//将OF节点与设备结构相关联,以便以后查找
| | |--- phy->mdio.dev.of_node = child
| | |
| | |--- phy_device_register(phy)//注册PHY设备
| | | |--- mdiobus_register_device(&phydev->mdio) //注册到mdiodev->bus,其实笔者认为这是一个虚拟的注册,仅仅是根据PHY的地址在mdiodev->bus->mdio_map数组对应位置填充这个mdiodev
| | | | |--- mdiodev->bus->mdio_map[mdiodev->addr] = mdiodev // 方便通过mdiodev->bus统一管理和查找,以及关联bus的读写函数,方便PHY的功能配置
| | | |
| | | |--- device_add(&phydev->mdio.dev)//注册到linux设备模型框架中
| |
| |--- if (!scanphys) //如果从子节点的"reg"属性中获得PHY设备的地址,scanphys=false,这里就直接返回了,因为不需要再扫描了
| | |--- return 0
| |
/******************************************************************************************************************
一般来说只要设备树种指定了PHY设备的"reg"属性,后面的流程可以自动忽略
******************************************************************************************************************
| |--- for_each_available_child_of_node(np, child) //自动扫描具有空"reg"属性的PHY
| |--- if (of_find_property(child, "reg", NULL)) //跳过具有reg属性集的PHY
| | |--- continue
| |
| |--- for (addr = 0; addr < PHY_MAX_ADDR; addr++) //循环遍历扫描
| |--- if (mdiobus_is_registered_device(mdio, addr)) //跳过已注册的PHY
| | |--- continue
| |
| |--- dev_info(&mdio->dev, "scan phy %s at address %i\n", child->name, addr) //打印扫描的PHY,建议开发人员设置"reg"属性
| |
| |--- if (of_mdiobus_child_is_phy(child))
| |--- of_mdiobus_register_phy(mdio, child, addr) //注册PHY设备
|
******************************************************************************************************************/
4. 直接调用CPU的MDIO控制器的方式
4.1 控制器平台设备在设备树中的大致描述方式(不完全准确,主要描述匹配的规则)
# linux4.9.225\Documentation\devicetree\bindings\powerpc\fsl\fman.txt
Example for FMan v3 internal MDIO:
mdio@e3120 { //描述MDIO控制器驱动节点
compatible = "fsl,fman-mdio";
reg = <0xe3120 0xee0>;
fsl,fman-internal-mdio;
tbi1: tbi-phy@8 { //描述控制器下挂PHY设备的节点
reg = <0x8>;
device_type = "tbi-phy";
};
};
4.2 控制器平台驱动代码走读
4.2.1 控制器平台驱动的注册
# linux-4.9.225\drivers\net\ethernet\freescale\fsl_pq_mdio.c
static const struct of_device_id fsl_pq_mdio_match[] = {
......
/* No Kconfig option for Fman support yet */
{
.compatible = "fsl,fman-mdio", //匹配平台设备的名称
.data = &(struct fsl_pq_mdio_data) {
.mii_offset = 0,
/* Fman TBI operations are handled elsewhere */
},
},
......
{},
};
static struct platform_driver fsl_pq_mdio_driver = {
.driver = {
.name = "fsl-pq_mdio",
.of_match_table = fsl_pq_mdio_match,
},
.probe = fsl_pq_mdio_probe,
.remove = fsl_pq_mdio_remove,
};
module_platform_driver(fsl_pq_mdio_driver); //注册控制器平台设备驱动
4.2.2 控制器平台驱动的probe函数走读
/****************************************************************************************
直接调用CPU的MDIO控制器的方式的MDIO控制器驱动(probe函数中涉及PHY设备的创建和注册)
****************************************************************************************/
# linux-4.9.225\drivers\net\ethernet\freescale\fsl_pq_mdio.c
fsl_pq_mdio_probe(struct platform_device *pdev
|--- struct fsl_pq_mdio_priv *priv
|--- struct mii_bus *new_bus
|
|--- new_bus = mdiobus_alloc_size(sizeof(*priv)) //分配结构体
|--- priv = new_bus->priv
|--- new_bus->name = "Freescale PowerQUICC MII Bus"
|--- new_bus->read = &fsl_pq_mdio_read //总线的读接口
|--- new_bus->write = &fsl_pq_mdio_write //总线的写接口
|--- new_bus->reset = &fsl_pq_mdio_reset //总线的复位接口
|
|--- of_address_to_resource(np, 0, &res) //获取控制器地址资源
|--- snprintf(bus->id, MII_BUS_ID_SIZE, "%x", res.start) //把资源的起始地址设置为bus->id
|
|--- of_mdiobus_register(new_bus, np)//注册mii_bus设备,并通过设备树中控制器的子节点创建PHY设备,这一点与模拟方式流程相同
of_mdiobus_register的流程与第四小节一致,这里就不再列出。
5. 控制器的读写会在哪里得到调用?
在PHY设备的注册中(读PHY ID)、PHY的初始化、自协商、中断、状态、能力获取等流程中经常可以看到phy_read和phy_write两个函数(下一节要讲的PHY驱动),这两个函数的实现就依赖于控制器设备mii_bus的读写。
phy_read和phy_write定义在linux-4.9.225\include\linux\phy.h中,如下:
static inline int phy_read(struct phy_device *phydev, u32 regnum)
{
return mdiobus_read(phydev->mdio.bus, phydev->mdio.addr, regnum);
}
static inline int phy_write(struct phy_device *phydev, u32 regnum, u16 val)
{
return mdiobus_write(phydev->mdio.bus, phydev->mdio.addr, regnum, val);
}
其中mdiobus_read和mdiobus_write定义在linux-4.9.225\drivers\net\phy\mdio_bus.c中,如下:
/**
* mdiobus_read - Convenience function for reading a given MII mgmt register
* @bus: the mii_bus struct
* @addr: the phy address
* @regnum: register number to read
*
* NOTE: MUST NOT be called from interrupt context,
* because the bus read/write functions may wait for an interrupt
* to conclude the operation.
*/
int mdiobus_read(struct mii_bus *bus, int addr, u32 regnum)
{
int retval;
BUG_ON(in_interrupt());
mutex_lock(&bus->mdio_lock);
retval = bus->read(bus, addr, regnum);
mutex_unlock(&bus->mdio_lock);
return retval;
}
/**
* mdiobus_write - Convenience function for writing a given MII mgmt register
* @bus: the mii_bus struct
* @addr: the phy address
* @regnum: register number to write
* @val: value to write to @regnum
*
* NOTE: MUST NOT be called from interrupt context,
* because the bus read/write functions may wait for an interrupt
* to conclude the operation.
*/
int mdiobus_write(struct mii_bus *bus, int addr, u32 regnum, u16 val)
{
int err;
BUG_ON(in_interrupt());
mutex_lock(&bus->mdio_lock);
err = bus->write(bus, addr, regnum, val);
mutex_unlock(&bus->mdio_lock);
return err;
}
可以清楚的看到bus->read和bus->write读写接口在这里得到调用。
6. mdio_bus总线
接下来要讲的PHY设备驱动是基于device、driver、bus的连接方式。其驱动涉及如下几个重要部分:
- 总线 - sturct mii_bus (mii stand for media independent interface)
- 设备 - struct phy_device
- 驱动 - struct phy_driver
关于PHY设备的创建和注册已经在第5节的probe函数中有过详细的描述(需要注意的是:phy设备不像i2c/spi有一个board_info函数进行设备的添加,而是直接读取phy中的寄存器<根据IEEE的规定,PHY芯片的前16个寄存器的内容必须是固定的>),本节就不再描述;
6.1 总线注册的入口函数
# linux-4.9.225\drivers\net\phy\phy_device.c
static int __init phy_init(void)
{
int rc;
rc = mdio_bus_init(); //mdio_bus总线的注册
if (rc)
return rc;
rc = phy_drivers_register(genphy_driver,ARRAY_SIZE(genphy_driver), THIS_MODULE); //通用PHY驱动
if (rc)
mdio_bus_exit();
return rc;
}
subsys_initcall(phy_init);
subsys_initcall(phy_init) 这行的作用非常重要,这一行就决定了内核在启动的时候会调用该函数,注册完了之后紧接着又注册一个通用的PHY驱动。
6.2 总线注册函数--- mdio_bus_init解析
# linux-4.9.225\drivers\net\phy\mdio_bus.c
static struct class mdio_bus_class = {
.name = "mdio_bus",
.dev_release = mdiobus_release,
};
static int mdio_bus_match(struct device *dev, struct device_driver *drv)
{
struct mdio_device *mdio = to_mdio_device(dev);
if (of_driver_match_device(dev, drv))
return 1;
if (mdio->bus_match)
return mdio->bus_match(dev, drv);
return 0;
}
struct bus_type mdio_bus_type = {
.name = "mdio_bus", //总线名称
.match = mdio_bus_match, //用来匹配总线上设备和驱动的函数
.pm = MDIO_BUS_PM_OPS,
};
EXPORT_SYMBOL(mdio_bus_type);
int __init mdio_bus_init(void)
{
int ret;
ret = class_register(&mdio_bus_class); //注册设备类 (在linux设备模型中,我再仔细讲这个类的概念)
if (!ret) {
ret = bus_register(&mdio_bus_type);//总线注册
if (ret)
class_unregister(&mdio_bus_class);
}
return ret;
}
其中
(1) class_register(&mdio_bus_class)执行后会有以下设备类:
- /sys/class/mdio_bus
(2)bus_register(&mdio_bus_type)执行后会有以下总线类型:
- /sys/bus/mdio_bus
6.3 总线中的match函数解析
/**
* mdio_bus_match - determine if given MDIO driver supports the given
* MDIO device
* @dev: target MDIO device
* @drv: given MDIO driver
*
* Description: Given a MDIO device, and a MDIO driver, return 1 if
* the driver supports the device. Otherwise, return 0. This may
* require calling the devices own match function, since different classes
* of MDIO devices have different match criteria.
*/
static int mdio_bus_match(struct device *dev, struct device_driver *drv)
{
struct mdio_device *mdio = to_mdio_device(dev);
if (of_driver_match_device(dev, drv))
return 1;
if (mdio->bus_match) //实现匹配的函数
return mdio->bus_match(dev, drv);
return 0;
}
7. 设备驱动的注册
在phy_init函数中不仅注册了mdio_bus总线,还注册了一个通用的PHY驱动作为缺省的内核PHY驱动,但是如果PHY芯片的内部寄存器和802.3定义的并不一样或者需要特殊的功能配置以实现更强的功能,这就需要专有的驱动。
关于通用PHY驱动的知识,网上有一大堆讲解,本节就不再重复的去描述。
对于市场上存在的主流PHY品牌,一般在内核源码 drivers\net\phy目录下都有对应的驱动。本节主要以realtek RTL8211F为例,讲述PHY的驱动,代码如下:
# linux-4.9.225\drivers\net\phy\realtek.c
static struct phy_driver realtek_drvs[] = {
......
, {
.phy_id = 0x001cc916,
.name = "RTL8211F Gigabit Ethernet",
.phy_id_mask = 0x001fffff,
.features = PHY_GBIT_FEATURES,
.flags = PHY_HAS_INTERRUPT,
.config_aneg = &genphy_config_aneg,
.config_init = &rtl8211f_config_init,
.read_status = &genphy_read_status,
.ack_interrupt = &rtl8211f_ack_interrupt,
.config_intr = &rtl8211f_config_intr,
.suspend = genphy_suspend,
.resume = genphy_resume,
},
};
module_phy_driver(realtek_drvs); //注册PHY驱动
static struct mdio_device_id __maybe_unused realtek_tbl[] = {
{ 0x001cc912, 0x001fffff },
{ 0x001cc914, 0x001fffff },
{ 0x001cc915, 0x001fffff },
{ 0x001cc916, 0x001fffff },
{ }
};
MODULE_DEVICE_TABLE(mdio, realtek_tbl);
7.1 phy驱动的注册
(1)同一品牌的PHY设备有多种不同的型号,内核为了支持一次可以注册多个型号的PHY的驱动,在include\linux\phy.h中提供了用于注册PHY驱动的宏module_phy_driver。该宏的定义如下:
# linux-4.9.225\include\linux\phy.h
#define phy_module_driver(__phy_drivers, __count) \
static int __init phy_module_init(void) \
{ \
return phy_drivers_register(__phy_drivers, __count, THIS_MODULE); \
}
#define module_phy_driver(__phy_drivers) \
phy_module_driver(__phy_drivers, ARRAY_SIZE(__phy_drivers))
(2)其中phy_driver_register定义如下(注意这里与老版本内核有一定的改动)
/**
* phy_driver_register - register a phy_driver with the PHY layer
* @new_driver: new phy_driver to register
* @owner: module owning this PHY
*/
int phy_driver_register(struct phy_driver *new_driver, struct module *owner)
{
int retval;
new_driver->mdiodrv.flags |= MDIO_DEVICE_IS_PHY;
new_driver->mdiodrv.driver.name = new_driver->name;//驱动名称
new_driver->mdiodrv.driver.bus = &mdio_bus_type; //驱动挂载的总线
new_driver->mdiodrv.driver.probe = phy_probe; //PHY设备和驱动匹配后调用的probe函数
new_driver->mdiodrv.driver.remove = phy_remove;
new_driver->mdiodrv.driver.owner = owner;
retval = driver_register(&new_driver->mdiodrv.driver); //向linux设备模型框架中注册device_driver驱动
if (retval) {
pr_err("%s: Error %d in registering driver\n",
new_driver->name, retval);
return retval;
}
pr_debug("%s: Registered new driver\n", new_driver->name);
return 0;
}
int phy_drivers_register(struct phy_driver *new_driver, int n,
struct module *owner)
{
int i, ret = 0;
for (i = 0; i < n; i++) {
ret = phy_driver_register(new_driver + i, owner);//注册数组中所有的phy驱动
if (ret) {
while (i-- > 0)
phy_driver_unregister(new_driver + i);
break;
}
}
return ret;
}
7.2 MODULE_DEVICE_TABLE宏的作用
7.2.1 C语言宏定义##连接符和#符的使用
1 . ## 连接符号
"##" 连接符号其功能是在带参数的宏定义中将两个子串(token)联接起来,从而形成一个新的子串。但它不可以是第一个或者最后一个子串。所谓的子串(token)就是指编译器能够识别的最小语法单元。
简单的说,“##”是一种分隔连接方式,它的作用是先分隔,然后进行强制连接。其中,分隔的作用类似于空格。
我们知道在普通的宏定义中,预处理器一般把空格解释成分段标志,并把分隔后的每一段和前面的定义比较,相同的就被替换。
如果采用空格来分隔,被替换后段与段之间存在一些空格。如果我们不希望出现这些空格,就可以通过添加一些 “##”来替代空格。例如:
#define example(name, type) name_##type##_type
"name"和第一个 *之间,以及第2个*和第二个 "type" 之间没有被分隔,所以预处理器会把name_##type##*type解释成3段:"name*"、"type"、以及"_type",其中只有"type"是在宏前面出现过的,所以它可以被宏替换。
2 . # 符号
单独的一个 "#" 则表示: 替换这个变量后,再加双引号引起来。例如,宏定义 __stringify_1(x) :
# linux-4.9.225\include\linux\stringify.h
#define __stringify_1(x) #x
那么 __stringify_1(realtek_tbl) <=等价于=> ”realtek_tbl"
7.2.2 alias函数
alias定义的函数将作为另一个函数的别名。
gcc官方的说明部分内容如下:5.24 Declaring Attributes of Functions:
alias (“target”)
The alias attribute causes the declaration to be emitted as an alias for another symbol, which must be specified. For instance,
void __f () { /* Do something. */; }
void f () __attribute__ ((weak, alias ("__f")));
declares f' to be a weak alias for__f'. In C++, the mangled name for the target must be used. It is an error if `__f' is not defined in the same translation unit.
7.2.3 指定变量的属性 - - - unused的用法
unused 表示该函数或变量可能不使用,这个属性可以避免编译器产生警告信息。在gcc官方的说明部分内容如下:
5.31 Specifying Attributes of Variables:
unused
This attribute, attached to a variable, means that the variable is meant to be possibly unused. GCC will not produce a warning for this variable.
7.2.4 MODULE_DEVICE_TABLE解析
MODULE_DEVICE_TABLE宏定义在 /include/linux/module.h中,如下:
/* Creates an alias so file2alias.c can find device table. */
#define MODULE_DEVICE_TABLE(type, name) \
extern const typeof(name) __mod_##type##__##name##_device_table \
__attribute__ ((unused, alias(__stringify(name))))
根据代码把这个宏展开之后会发现:
生成了一个 _mod_type__name_device_table 的符号表,其中type为类型,name是这个驱动的名称。在内核编译的时候将这部分符号单独放置在一个区域。
当内核运行的时,用户可以通过类型(tpye)和类型对应的设备表中名称(name)中动态的加载驱动,在表中查找到了这个符号之后可以迅速的加载驱动。
MODULE_DEVICE_TABLE的第一个参数是设备的类型,如果是PHY设备,那自然是MDIO(如果是PCI设备,那将是pci)。后面一个参数是设备表,这个设备表的最后一个元素是空的,用于标识结束。
7.2.5 MODULE_DEVICE_TABLE(mdio, realtek_tbl)解析(待验证,后续再来修改)
1. 定义
/**
* struct mdio_device_id - identifies PHY devices on an MDIO/MII bus
* @phy_id: The result of
* (mdio_read(&MII_PHYSID1) << 16 | mdio_read(&PHYSID2)) & @phy_id_mask
* for this PHY type
* @phy_id_mask: Defines the significant bits of @phy_id. A value of 0
* is used to terminate an array of struct mdio_device_id.
*/
struct mdio_device_id {
__u32 phy_id;
__u32 phy_id_mask;
};
static struct mdio_device_id __maybe_unused realtek_tbl[] = {
{ 0x001cc912, 0x001fffff },
{ 0x001cc914, 0x001fffff },
{ 0x001cc915, 0x001fffff },
{ 0x001cc916, 0x001fffff },
{ }
};
MODULE_DEVICE_TABLE(mdio, realtek_tbl);
2 . 展开:
#define MODULE_DEVICE_TABLE(mdio, realtek_tbl) \
extern const struct mdio_device_id __mod_mdio__realtek_tbl_device_table \
__attribute__ ((unused, "realtek_tbl")))
生成一个名为__mod_mdio__realtek_tbl_device_table,内核构建时,depmod程序会在所有模块中搜索符号__mod_mdio__realtek_tbl_device_table,把数据(设备列表)从模块中抽出,添加到映射文件 /lib/modules/KERNEL_VERSION/modules.mdiomap 中,当depmod结束之后,所有的MDIO设备连同他们的模块名字都被该文件列出。在需要驱动的时候,由modules.mdiomap 文件来找寻恰当的驱动程序。
8. 设备驱动与控制器驱动之间的关系图
原文链接:https://www.cnblogs.com/jianhua1992/category/2242540.html ;本文仅作交流分享,版权归原作者所有,如有侵权,请联系作者删除。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号