

Bresenham算法
1 算法原理
基本原理从某处摘得:设直线方程为yi+1=yi+k(xi+1-xi)+k。假设列坐标象素已经确定为xi,其行坐标为yi。那么下一个象素的列坐标为xi+1,而行坐标要么为yi,要么递增1为yi+1。是否增1取决于误差项d的值。误差项d的初值d0=0,x坐标每增加1,d的值相应递增直线的斜率值k,即d=d+k。一旦d≥1,就把它减去1,这样保证d在0、1之间。当d≥0.5时,直线与垂线x=xi+1交点最接近于当前象素(xi,yi)的右上方象素(xi+1,yi+1);而当d<0.5时,更接近于右方象素(xi+1,yi)。为方便计算,令e=d-0.5,e的初值为-0.5,增量为k。当e≥0时,取当前象素(xi,yi)的右上方象素(xi+1,yi+1);而当e<0时,取(xi,yi)右方象素(xi+1,yi)。
由于显示直线的像素点只能取整数值坐标,可以假设直线上第i个像素点的坐标为(Xi,Yi),它是直线上点(Xi,Yi)最佳近似,并且Xi=Xi(假设m<1),如下图所示.那么直线上下一个像素点的可能位置是(Xi+1,Yi)或者(Xi+1,Yi+1).
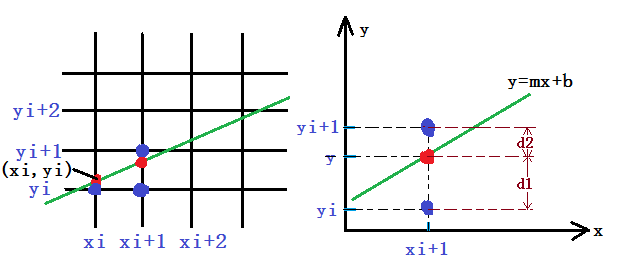
由图可知:在x=Xi+1处,直线上的点y的值是:y=m(Xi+1)+b,该点离像素点(Xi+1,Yi)和像素点(Xi+1,Yi+1)的距离分别为d1和d2。
d1 = Y - Yi = m(Xi+1)+b - Yi; (1)
d2 = (Yi+1) - Y = (Yi+1) - m(Xi+1) - b; (2)
两个距离的差是:
d1-d2 = 2m(Xi+1) - 2Yi + 2b -1; (3)
对于公式(3):
a:当此值为正时,d1>d2,说明直线上理论点离(Xi+1,Yi+1)像素较近,下一个像素点应取(Xi+1,Yi+1);
b:当此值为负时,d1<d2,说明直线上理论点离(Xi+1,Yi)像素较近,下一个像素点赢取(Xi+1,Yi);
c:当此值为零时,d1=d2,说明直线上理论点离上、下两个像素点的距离相等,取那个点都行,假设算法规定这种情况下取(Xi+1,Yi+1)作为下一个像素点。
因此只要利用(d1-d2)的符号就可以决定下一个像素点的选择。需进一步定义一个判别式:
Pi = △X × (d1-d2) = 2△Y·Xi - 2△X·Yi + c (4)
其中△X=(X2-X1)>0,因此Pi与(d1-d2)有相同的符号;
△Y=Y2-Y1;m=△Y/△X;c=2△Y+△X(2b-1)
对(4)进一步处理得出误差判别递推公式并消除常数c;
将(4)中的下标i改为i+1,得到:
Pi+1 = △X × (d1-d2) = 2△Y·Xi+1 - 2△X·Yi+1 + c (5)
假设直线的初始端点恰好是其像素点的坐标,即满足:
Y1 = mX1 + b ; (6)
由公式(4)和(6)得到p1的初始值:
P1 = 2△Y - △X; (7)
/*推导过程*/ Pi = △X × (d1-d2) = 2△Y·Xi - 2△X·Yi + c (4) Y1 = mX1 + b (6) P1 = 2△Y·X1 - 2△X·Y1 + c = 2△Y·X1 - 2△X·(△Y/△X·X1+b) + c = 2△Y·X1 - 2△Y·X1 - 2△X·b + c = c - 2△X·b = 2△Y+△X(2b-1) - 2△X·b = 2△Y - △X
所以可以用误差判别变量,得到如下算法表示:
初始:P1 = 2△Y - △X (8)
当Pi>=0时:Yi+1 = Yi + 1,Xi+1 = Xi + 1,Pi+1 = Pi + 2(△Y-△X)[根据公式(4)和(5)得出];
/*推导过程*/ Pi = △X × (d1-d2) = 2△Y·Xi - 2△X·Yi + c (4) Pi+1 = △X × (d1-d2) = 2△Y·Xi+1 - 2△X·Yi+1 + c (5) (4)-(5)得: Pi+1 = Pi + (2△Y·Xi+1)-2△Y·Xi - (2△X·Yi+1)+2△X·Yi ∵ Pi>0 时 Yi+1 = Yi + 1,Xi+1 = Xi + 1 ∴ Pi+1 = Pi + (2△Y·(Xi + 1))-2△Y·Xi - (2△X·(Yi + 1))+2△X·Yi = Pi + 2(△Y-△X)
否则:Yi+1 = Yi,Xi+1=Xi + 1,Pi+1=Pi+2△y[根据公式(4)和(5)得出]
/*推导过程*/ Pi = △X × (d1-d2) = 2△Y·Xi - 2△X·Yi + c (4) Pi+1 = △X × (d1-d2) = 2△Y·Xi+1 - 2△X·Y(i+1) + c (5) (4)-(5)得: Pi+1 = Pi + (2△Y·Xi+1)-2△Y·Xi - (2△X·Yi+1)+2△X·Yi ∵ Pi>0 时 Yi+1 = Yi,Xi+1 = Xi + 1 ∴ Pi+1 = Pi + (2△Y·(Xi + 1))-2△Y·Xi - (2△X·(Yi))+2△X·Yi = Pi + 2△Y
从(8)式可以看出,第i+1步的判别变量Pi+1仅与第i步的判别变量Pi、直线的两个端点坐标分量差△X和△Y有关,运算中只含有整数相加和乘2运算,而乘2可利用算术左移一位来完成,因此这个算法速度快并易于硬件实现。
