
esp32读写QAM7981加速度芯片驱动
QMA I2C驱动
基本配置
esp-idf 是最新的分支
开发板型号为esp32c3
代码链接
doincli/QMA_I2C: esp32读写QAM7981加速度芯片驱动 (github.com)
重要参数
I2C_MASTER_SCL_IO //i2c时钟引脚
I2C_MASTER_SDA_IO //i2c数据引脚
QMA7981_ADDR //QMA7981地址
QMA7981_DXM_ADDR //X轴寄存器地址
QMA7981_MODE_ADDR //模式地址 设置成活动状态 以及两种相关的通信速率
QMA7981_RANGE_ADDR //量程地址 设置不同的量程 可以有5种不同的情况
QMA7981_MODE_100K_cmd //模式命令 设置成活动状态 速率100k
QMA7981_RAG_2g_cmd //量程命令 设置成2g的量程
重要函数
esp_err_t i2c_master_init(void); //I2c初始化函数
esp_err_t QMA7981_setMode(uint8_t cmd) //模式设置函数 里面是模式命令
esp_err_t QMA7981_setAcc(uint8_t cmd) //量程设置函数 里面是量程命令
float QMA7981_read_DXM(); //读取X轴加速度
float QMA7981_read_DYM(); //读取Y轴加速度
float QMA7981_read_DZM(); //读取Z轴加速度
esp_err_t QMA7981_register_write_byte(uint8_t reg_addr, uint8_t cmd); //I2C写入命令函数
esp_err_t QMA7981_register_read(uint8_t reg_addr, uint8_t *data, size_t len);//i2c从特定寄存器读取数据函数
测试流程
首先初始化i2c ,然后设置相关模型以及量程
ESP_ERROR_CHECK(i2c_master_init());
ESP_ERROR_CHECK(QMA7981_setMode(QMA7981_MODE_100K_cmd));//设置为active模式
ESP_ERROR_CHECK(QMA7981_setAcc(QMA7981_RAG_2g_cmd));
然后读取 X,Y,Z三个轴的加速度
float X_AXIS_A;
float Y_AXIS_A;
float Z_AXIS_A;
X_AXIS_A = QMA7981_read_DXM() ;
Y_AXIS_A = QMA7981_read_DYM() ;
Z_AXIS_A = QMA7981_read_DZM() ;
测试代码如下
void app_main(void)
{
float X_AXIS_A;
float Y_AXIS_A;
float Z_AXIS_A;
ESP_ERROR_CHECK(i2c_master_init());
ESP_ERROR_CHECK(QMA7981_setMode(QMA7981_MODE_100K_cmd)); //设置为active模式
ESP_ERROR_CHECK(QMA7981_setAcc(QMA7981_RAG_2g_cmd));
while(1)
{
X_AXIS_A = QMA7981_read_DXM() ;
Y_AXIS_A = QMA7981_read_DYM() ;
Z_AXIS_A = QMA7981_read_DZM() ;
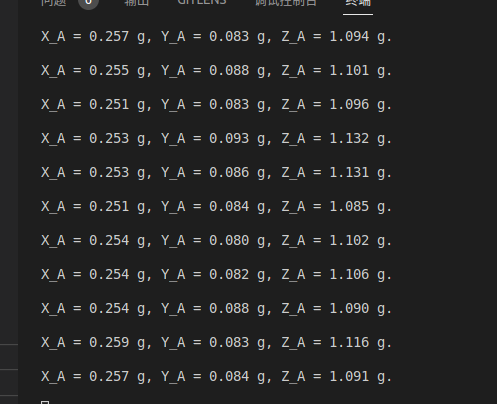
printf("X_A = %.3f g, Y_A = %.3f g, Z_A = %.3f g. \n", X_AXIS_A, Y_AXIS_A, Z_AXIS_A);
printf("\n");
vTaskDelay(1000 / portTICK_PERIOD_MS);
}
}
测试结果

 浙公网安备 33010602011771号
浙公网安备 33010602011771号