
GTX_check 模块代码学习
GTX CHECK学习
全部的例程
check模块的全部代码如下:
///////////////////////////////////////////////////////////////////////////////
// ____ ____
// / /\/ /
// /___/ \ / Vendor: Xilinx
// \ \ \/ Version : 3.6
// \ \ Application : 7 Series FPGAs Transceivers Wizard
// / / Filename : ber_gt_frame_check.v
// /___/ /\
// \ \ / \
// \___\/\___\
//
//
// Module BER_GT_FRAME_CHECK
// Generated by Xilinx 7 Series FPGAs Transceivers Wizard
//
//
// (c) Copyright 2010-2012 Xilinx, Inc. All rights reserved.
//
// This file contains confidential and proprietary information
// of Xilinx, Inc. and is protected under U.S. and
// international copyright and other intellectual property
// laws.
//
// DISCLAIMER
// This disclaimer is not a license and does not grant any
// rights to the materials distributed herewith. Except as
// otherwise provided in a valid license issued to you by
// Xilinx, and to the maximum extent permitted by applicable
// law: (1) THESE MATERIALS ARE MADE AVAILABLE "AS IS" AND
// WITH ALL FAULTS, AND XILINX HEREBY DISCLAIMS ALL WARRANTIES
// AND CONDITIONS, EXPRESS, IMPLIED, OR STATUTORY, INCLUDING
// BUT NOT LIMITED TO WARRANTIES OF MERCHANTABILITY, NON-
// INFRINGEMENT, OR FITNESS FOR ANY PARTICULAR PURPOSE; and
// (2) Xilinx shall not be liable (whether in contract or tort,
// including negligence, or under any other theory of
// liability) for any loss or damage of any kind or nature
// related to, arising under or in connection with these
// materials, including for any direct, or any indirect,
// special, incidental, or consequential loss or damage
// (including loss of data, profits, goodwill, or any type of
// loss or damage suffered as a result of any action brought
// by a third party) even if such damage or loss was
// reasonably foreseeable or Xilinx had been advised of the
// possibility of the same.
//
// CRITICAL APPLICATIONS
// Xilinx products are not designed or intended to be fail-
// safe, or for use in any application requiring fail-safe
// performance, such as life-support or safety devices or
// systems, Class III medical devices, nuclear facilities,
// applications related to the deployment of airbags, or any
// other applications that could lead to death, personal
// injury, or severe property or environmental damage
// (individually and collectively, "Critical
// Applications"). Customer assumes the sole risk and
// liability of any use of Xilinx products in Critical
// Applications, subject only to applicable laws and
// regulations governing limitations on product liability.
//
// THIS COPYRIGHT NOTICE AND DISCLAIMER MUST BE RETAINED AS
// PART OF THIS FILE AT ALL TIMES.
`timescale 1ns / 1ps
`define DLY #1
//***********************************Entity Declaration************************
(* DowngradeIPIdentifiedWarnings="yes" *)
module BER_GT_FRAME_CHECK #
(
// parameter to set the number of words in the BRAM
parameter RX_DATA_WIDTH = 64,
parameter RXCTRL_WIDTH = 2,
parameter WORDS_IN_BRAM = 512,
parameter CHANBOND_SEQ_LEN = 1,
parameter COMMA_DOUBLE = 16'hf628,
parameter START_OF_PACKET_CHAR = 64'h00000000000000fb
)
(
// User Interface
input wire [(RX_DATA_WIDTH-1):0] RX_DATA_IN,
input wire [(RXCTRL_WIDTH-1):0] RXCTRL_IN,
output reg RXENPCOMMADET_OUT,
output reg RXENMCOMMADET_OUT,
output reg RX_ENCHAN_SYNC_OUT,
input wire RX_CHANBOND_SEQ_IN,
// Control Interface
input wire INC_IN,
output wire INC_OUT,
output wire PATTERN_MATCHB_OUT,
input wire RESET_ON_ERROR_IN,
// Error Monitoring
output wire [7:0] ERROR_COUNT_OUT,
// Track Data
output wire TRACK_DATA_OUT,
// System Interface
input wire USER_CLK,
input wire SYSTEM_RESET
);
//***************************Internal Register Declarations********************
reg reset_on_error_in_r;
reg reset_on_error_in_r2;
(* ASYNC_REG = "TRUE" *) (* keep = "true" *)reg system_reset_r;
(* ASYNC_REG = "TRUE" *) (* keep = "true" *)reg system_reset_r2;
reg begin_r;
reg data_error_detected_r;
reg [8:0] error_count_r;
reg error_detected_r;
reg [9:0] read_counter_i;
reg [79:0] rom [0:511];
reg [(RX_DATA_WIDTH-1):0] rx_data_r;
reg [(RX_DATA_WIDTH-1):0] rx_data_r_track;
reg start_of_packet_detected_r;
reg track_data_r;
reg track_data_r2;
reg track_data_r3;
reg [79:0] rx_data_ram_r;
reg [(RX_DATA_WIDTH-1):0] rx_data_r2;
reg [(RX_DATA_WIDTH-1):0] rx_data_r3;
reg [(RX_DATA_WIDTH-1):0] rx_data_r4;
reg [(RX_DATA_WIDTH-1):0] rx_data_r5;
reg [(RX_DATA_WIDTH-1):0] rx_data_r6;
reg [(RXCTRL_WIDTH-1):0] rxctrl_r;
reg [(RXCTRL_WIDTH-1):0] rxctrl_r2;
reg [(RXCTRL_WIDTH-1):0] rxctrl_r3;
reg rx_chanbond_seq_r;
reg rx_chanbond_seq_r2;
reg rx_chanbond_seq_r3;
reg [1:0] sel;
//*********************************Wire Declarations***************************
wire [(RX_DATA_WIDTH-1):0] bram_data_r;
wire error_detected_c;
wire next_begin_c;
wire next_data_error_detected_c;
wire next_track_data_c;
wire start_of_packet_detected_c;
wire chanbondseq_in_data;
wire input_to_chanbond_data_i;
wire input_to_chanbond_reg_i;
wire [(CHANBOND_SEQ_LEN-1):0] rx_chanbond_reg;
wire [(RX_DATA_WIDTH-1):0] rx_data_aligned;
wire rx_data_has_start_char_c;
wire tied_to_ground_i;
wire [31:0] tied_to_ground_vec_i;
wire tied_to_vcc_i;
//*********************************Main Body of Code***************************
//_______________________ Static signal Assigments _______________________
assign tied_to_ground_i = 1'b0;
assign tied_to_ground_vec_i = 32'h0000;
assign tied_to_vcc_i = 1'b1;
//___________ synchronizing the async reset for ease of timing simulation ________
always@(posedge USER_CLK)
begin
system_reset_r <= `DLY SYSTEM_RESET;
system_reset_r2 <= `DLY system_reset_r;
end
always@(posedge USER_CLK)
begin
reset_on_error_in_r <= `DLY RESET_ON_ERROR_IN;
reset_on_error_in_r2 <= `DLY reset_on_error_in_r;
end
//______________________ Register RXDATA once to ease timing ______________
always @(posedge USER_CLK)
begin
rx_data_r <= `DLY RX_DATA_IN;
rx_data_r2 <= `DLY rx_data_r;
end
always @(posedge USER_CLK)
begin
rxctrl_r <= `DLY RXCTRL_IN;
end
//________________________________ State machine __________________________
// State registers
always @(posedge USER_CLK)
if(system_reset_r2)
{begin_r,track_data_r,data_error_detected_r} <= `DLY 3'b100;
else
begin
begin_r <= `DLY next_begin_c;
track_data_r <= `DLY next_track_data_c;
data_error_detected_r <= `DLY next_data_error_detected_c;
end
// Next state logic
assign next_begin_c = (begin_r && !start_of_packet_detected_r)
|| data_error_detected_r ;
assign next_track_data_c = (begin_r && start_of_packet_detected_r)
|| (track_data_r && !error_detected_r);
assign next_data_error_detected_c = (track_data_r && error_detected_r);
assign start_of_packet_detected_c = rx_data_has_start_char_c;
always @(posedge USER_CLK)
start_of_packet_detected_r <= `DLY start_of_packet_detected_c;
// Registering for timing
always @(posedge USER_CLK)
track_data_r2 <= `DLY track_data_r;
always @(posedge USER_CLK)
track_data_r3 <= `DLY track_data_r2;
//______________________________ Capture incoming data ____________________
always @(posedge USER_CLK)
begin
if(system_reset_r2) rx_data_r3 <= 'h0;
else
begin
if(sel == 2'b01)
begin
rx_data_r3 <= `DLY {rx_data_r[(RX_DATA_WIDTH/2 - 1):0],rx_data_r2[(RX_DATA_WIDTH-1):RX_DATA_WIDTH/2]};
end
else rx_data_r3 <= `DLY rx_data_r2;
end
end
always @(posedge USER_CLK)
begin
if(system_reset_r2)
begin
rx_data_r4 <= `DLY 'h0;
rx_data_r5 <= `DLY 'h0;
rx_data_r6 <= `DLY 'h0;
rx_data_r_track <= `DLY 'h0;
end
else
begin
rx_data_r4 <= `DLY rx_data_r3;
rx_data_r5 <= `DLY rx_data_r4;
rx_data_r6 <= `DLY rx_data_r5;
rx_data_r_track <= `DLY rx_data_r6;
end
end
always @(posedge USER_CLK)
begin
if(system_reset_r2)
begin
rxctrl_r2 <= `DLY 'h0;
rxctrl_r3 <= `DLY 'h0;
end
else
begin
rxctrl_r2 <= `DLY rxctrl_r;
rxctrl_r3 <= `DLY rxctrl_r2;
end
end
assign rx_data_aligned = rx_data_r3;
//___________________________ Code for Channel bonding ____________________
// code to prevent checking of clock correction sequences for the start of packet char
always @(posedge USER_CLK)
begin
rx_chanbond_seq_r <= `DLY RX_CHANBOND_SEQ_IN;
rx_chanbond_seq_r2 <= `DLY rx_chanbond_seq_r;
rx_chanbond_seq_r3 <= `DLY rx_chanbond_seq_r2;
end
assign input_to_chanbond_reg_i = rx_chanbond_seq_r2;
assign input_to_chanbond_data_i = tied_to_ground_i;
// In 2 Byte scenario, when align_comma_word=1, Comma can appear on any of the two bytes
// The comma is moved to the lower byte so that error checking can start
always @(posedge USER_CLK)
begin
if(reset_on_error_in_r2 || system_reset_r2) sel <= 2'b00;
else if (begin_r && !rx_chanbond_seq_r)
begin
// if Comma appears on BYTE0 ..
if((rx_data_r[(RX_DATA_WIDTH/2 - 1):0] == START_OF_PACKET_CHAR[7:0]) && rxctrl_r[0])
sel <= 2'b00;
// if Comma appears on BYTE1 ..
else if((rx_data_r[(RX_DATA_WIDTH-1):RX_DATA_WIDTH/2] == START_OF_PACKET_CHAR[7:0]) && rxctrl_r[1])
begin
sel <= 2'b01;
end
end
end
//___________________________ Code for Channel bonding ____________________
// code to prevent checking of clock correction sequences for the start of packet char
genvar i;
generate
for (i=0;i<CHANBOND_SEQ_LEN ;i=i+1)
begin:register_chan_seq
if(i==0)
FD rx_chanbond_reg_0 ( .Q (rx_chanbond_reg[i]), .D (input_to_chanbond_reg_i), .C(USER_CLK));
else
FD rx_chanbond_reg_i ( .Q (rx_chanbond_reg[i]), .D (rx_chanbond_reg[i-1]), .C(USER_CLK));
end
endgenerate
assign chanbondseq_in_data = |rx_chanbond_reg || input_to_chanbond_data_i;
assign rx_data_has_start_char_c = (rx_data_aligned[7:0] == START_OF_PACKET_CHAR[7:0]) && !chanbondseq_in_data && (|rxctrl_r3);
//_____________________________ Assign output ports _______________________
//assign TRACK_DATA_OUT = track_data_r;
// Drive the enpcommaalign port of the gt for alignment
always @(posedge USER_CLK)
if(system_reset_r2) RXENPCOMMADET_OUT <= `DLY 1'b0;
else RXENPCOMMADET_OUT <= `DLY 1'b1;
// Drive the enmcommaalign port of the gt for alignment
always @(posedge USER_CLK)
if(system_reset_r2) RXENMCOMMADET_OUT <= `DLY 1'b0;
else RXENMCOMMADET_OUT <= `DLY 1'b1;
assign INC_OUT = start_of_packet_detected_c;
assign PATTERN_MATCHB_OUT = data_error_detected_r;
// Drive the enchansync port of the mgt for channel bonding
always @(posedge USER_CLK)
if(system_reset_r2) RX_ENCHAN_SYNC_OUT <= `DLY 1'b0;
else RX_ENCHAN_SYNC_OUT <= `DLY 1'b1;
//___________________________ Check incoming data for errors ______________
//An error is detected when data read for the BRAM does not match the incoming data
assign error_detected_c = track_data_r3 && (rx_data_r_track != bram_data_r);
//We register the error_detected signal for use with the error counter logic
always @(posedge USER_CLK)
if(!track_data_r)
error_detected_r <= `DLY 1'b0;
else
error_detected_r <= `DLY error_detected_c;
//We count the total number of errors we detect. By keeping a count we make it less likely that we will miss
//errors we did not directly observe.
always @(posedge USER_CLK)
if(system_reset_r2)
error_count_r <= `DLY 9'd0;
else if(error_detected_r)
error_count_r <= `DLY error_count_r + 1;
//Here we connect the lower 8 bits of the count (the MSbit is used only to check when the counter reaches
//max value) to the module output
assign ERROR_COUNT_OUT = error_count_r[7:0];
localparam ST_LINK_DOWN = 1'b0;
localparam ST_LINK_UP = 1'b1;
reg sm_link = ST_LINK_DOWN;
reg [6:0] link_ctr = 7'd0;
always @(posedge USER_CLK) begin
if(!track_data_r)
sm_link <= ST_LINK_DOWN;
else
case (sm_link)
// The link is considered to be down when the link counter initially has a value less than 67. When the link is
// down, the counter is incremented on each cycle where all PRBS bits match, but reset whenever any PRBS mismatch
// occurs. When the link counter reaches 67, transition to the link up state.
ST_LINK_DOWN: begin
if (error_detected_r !== 1'b0) begin
link_ctr <= 7'd0;
end
else begin
if (link_ctr < 7'd67)
link_ctr <= link_ctr + 7'd1;
else
sm_link <= ST_LINK_UP;
end
end
// When the link is up, the link counter is decreased by 34 whenever any PRBS mismatch occurs, but is increased by
// only 1 on each cycle where all PRBS bits match, up to its saturation point of 67. If the link counter reaches
// 0 (including rollover protection), transition to the link down state.
ST_LINK_UP: begin
if (error_detected_r !== 1'b0) begin
if (link_ctr > 7'd33) begin
link_ctr <= link_ctr - 7'd34;
if (link_ctr == 7'd34)
sm_link <= ST_LINK_DOWN;
end
else begin
link_ctr <= 7'd0;
sm_link <= ST_LINK_DOWN;
end
end
else begin
if (link_ctr < 7'd67)
link_ctr <= link_ctr + 7'd1;
end
end
endcase
end
assign TRACK_DATA_OUT = sm_link;
//____________________________ Counter to read from BRAM __________________________
always @(posedge USER_CLK)
if(system_reset_r2 || (read_counter_i == (WORDS_IN_BRAM-1)))
begin
read_counter_i <= `DLY 10'd0;
end
else if (start_of_packet_detected_r && !track_data_r)
begin
read_counter_i <= `DLY 10'd0;
end
else
begin
read_counter_i <= `DLY read_counter_i + 10'd1;
end
//________________________________ BRAM Inference Logic _____________________________
//Array slice from dat file to compare against receive data
generate
if(RX_DATA_WIDTH==80)
begin : datapath_80
assign bram_data_r = rx_data_ram_r[(RX_DATA_WIDTH-1):0];
end
else
begin : datapath_16_20_32_40_64
assign bram_data_r = rx_data_ram_r[(16+RX_DATA_WIDTH-1):16];
end
endgenerate
initial
begin
$readmemh("gt_rom_init_rx.dat",rom,0,511);
end
always @(posedge USER_CLK)
rx_data_ram_r <= `DLY rom[read_counter_i];
endmodule
check 模块的数据输入
顶层模块调用的代码
gtx_ber_GT_FRAME_CHECK #
(
.RX_DATA_WIDTH ( 16 ),
.RXCTRL_WIDTH ( 2 ),
.COMMA_DOUBLE ( 16'h02bc ),
.WORDS_IN_BRAM(EXAMPLE_WORDS_IN_BRAM),
.START_OF_PACKET_CHAR ( 16'h02bc )
)
gt0_frame_check
(
// GT Interface
.RX_DATA_IN (gt0_rxdata_i),
.RXCTRL_IN (gt0_rxcharisk_i),
// 未用,高电平有效信号,可实现字节边界对齐检测到plus COMMA模式时进行处理。output 长1
.RXENMCOMMADET_OUT (gt0_rxmcommaalignen_i),
// 未用,高电平有效信号,可实现字节边界对齐检测到minus COMMA模式时进行处理。 output 长1
.RXENPCOMMADET_OUT (gt0_rxpcommaalignen_i),
// 未用,驱动mgt的enchansync端口进行通道绑定output 长1
.RX_ENCHAN_SYNC_OUT ( ),
// 输入通道绑定序列,不绑定时为0 input
.RX_CHANBOND_SEQ_IN (tied_to_ground_i),
// Control Interface
// 未用 input 长期是0
.INC_IN (gt0_inc_in_i),
// 非独立的收发测试时输出已开始进行COMMA检测,指示发送端地址递增 output //每一帧有一个高电平
.INC_OUT (gt0_inc_out_i),
// COMMA不匹配 output 和ROM核不匹配的时候 延时两个周期置高电平
.PATTERN_MATCHB_OUT (gt0_matchn_i),
// 通过将PATTERN_MATCHB_OUT 输出给外部,由此产生出错后的复位 input
//assign gt0_frame_check_reset_i =gt0_matchn_i; 也就是错误复位
.RESET_ON_ERROR_IN (gt0_frame_check_reset_i),
// System Interface
.USER_CLK (gt0_rxusrclk2_i),
.SYSTEM_RESET (gt0_rx_system_reset_c),//全局复位 in
.ERROR_COUNT_OUT (gt0_error_count_i), //错误的个数 out
.TRACK_DATA_OUT (gt0_track_data_i) //错了变0 第二帧重新变1
);输入输出的电平情况
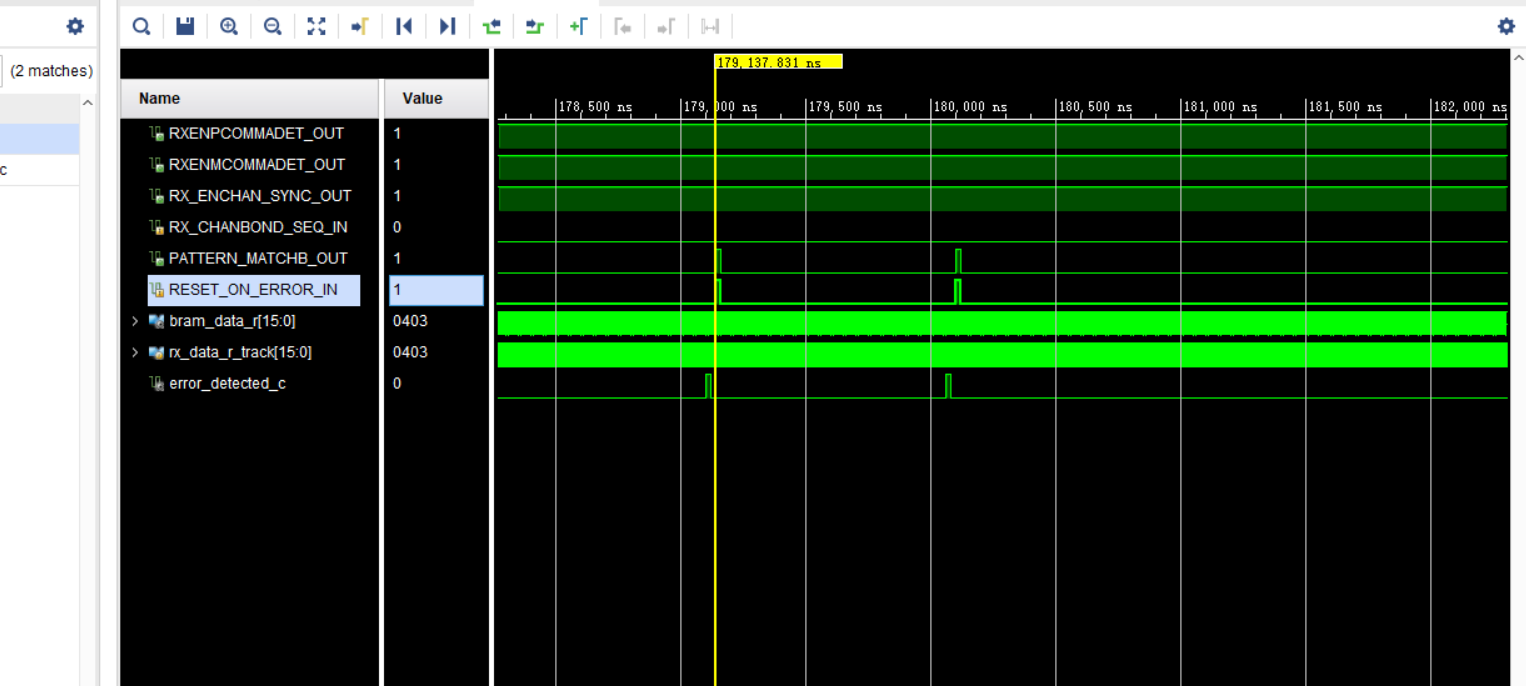
RXENPCOMMADET_OUT、RXENMCOMMADET_OUT、RX_ENCHAN_SYNC_OUT ——一直是高电平
RX_CHANBOND_SEQ_IN —— 一直是低电平 长0
PATTERN_MATCHB_OUT、RESET_ON_ERROR_IN ———— 检测到数据出现错误时候是高电平 没有错误是低电平
rx_data_r_track <= `DLY rx_data_r6;
基本的知识
首先进行了参数的重新定义
- 把RX_DATA_WIDTH变成了16位
- 把COMMA_DOUBLE对齐信号变成了16'h02bc
- 把START_OF_PACKET_CHAR 信号也变成16'h02bc
重要的数据线
- RX_DATA_IN ----------16位
- RXCTRL_IN ----------2位
时钟与复位
gt0_rxusrclk2_i 时钟
gt0_rx_system_reset_c ——SYSTEM_RESET 复位
`define DLY #1 定义了1ns的延迟,防止时序问题
有用的信号线
数据线
- error_detected_c // error_detected_r ——-错误拉高信号 打了一拍(不知道为啥)
- track_data_r3 ---输出有效 一直是高电平
- bram_data_r ---可变寄存器 本例程中是16位
- rx_data_r ——RX_DATA_IN延时出来的 延时几个数字就是几
- rxctrl_r ——RXCTRL_IN延时出来的 延时几个数字就是几
- rx_data_r_track -------- rx_data_r6也就是延迟了6拍的rxdata // rx_data_r_track <= `DLY rx_data_r6;
- rx_data_aligned ——就是rx_data_r3 代码: assign rx_data_aligned = rx_data_r3; 这也就可以对齐了
选择控制线
基本的控制线
- system_reset_r2 全局使用的复位信号 SYSTEM_RESET 延时两拍
- reset_on_error_in_r2 错误复位信号 RESET_ON_ERROR_IN 延时两拍
状态机控制信号线
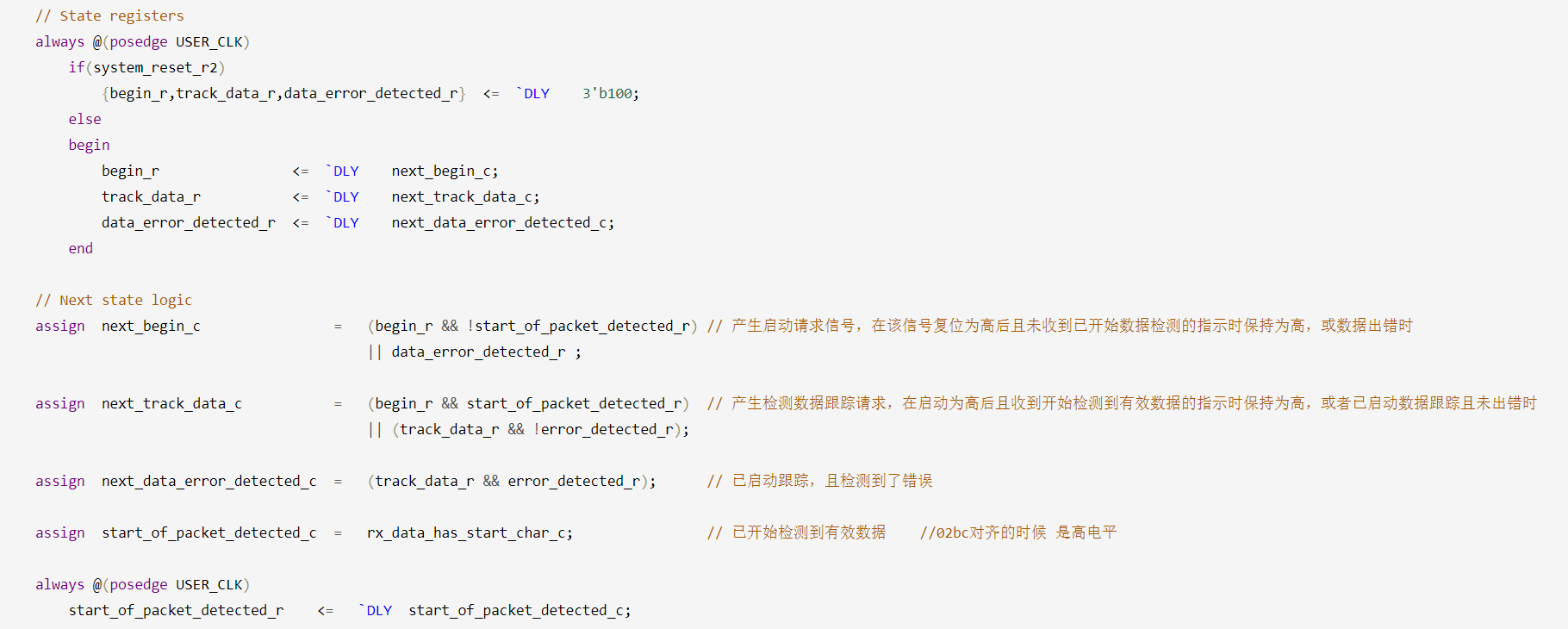
- begin_r 启动请求信号,在该信号复位为高后且未收到已开始数据检测的指示时保持为高,或数据出错时
- track_data_r // 产生检测数据跟踪请求,在启动为高后且收到开始检测到有效数据的指示时保持为高,或者已启动数据跟踪且未出错时
- data_error_detected_r // 已启动跟踪,且检测到了错误
- start_of_packet_detected_r // 已开始检测到有效数据 //02bc对齐的时候 是高电平 也就是每过一帧数据 又一次升高的情况 可以用来做整体的cnt的使能信号 start_of_packet_detected_c延时一拍得到的
- error_detected_c //assign error_detected_c = track_data_r3 && (rx_data_r_track != bram_data_r);
- rx_data_has_start_char_c rx_data_r3 =bc 变成高电平
- start_of_packet_detected_c // assign start_of_packet_detected_c = rx_data_has_start_char_c;
always @(posedge USER_CLK)
if(system_reset_r2)
{begin_r,track_data_r,data_error_detected_r} <= `DLY 3'b100;
else
begin
begin_r <= `DLY next_begin_c;
track_data_r <= `DLY next_track_data_c;
data_error_detected_r <= `DLY next_data_error_detected_c;
end
// Next state logic
assign next_begin_c = (begin_r && !start_of_packet_detected_r)
|| data_error_detected_r ;
assign next_track_data_c = (begin_r && start_of_packet_detected_r)
|| (track_data_r && !error_detected_r);
assign next_data_error_detected_c = (track_data_r && error_detected_r);
assign start_of_packet_detected_c = rx_data_has_start_char_c;
always @(posedge USER_CLK)
start_of_packet_detected_r <= `DLY start_of_packet_detected_c;关键的步骤
判断数值是否正确的代码
359行:
assign error_detected_c = track_data_r3 && (rx_data_r_track != bram_data_r);代码解释:
当为BRAM读取的数据与传入的数据不匹配时,将检测到错误。
自己写的误码率计算在362行
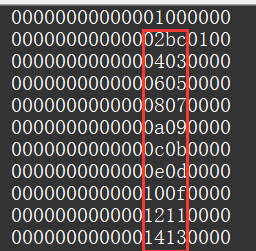
bram_data_r的由来
assign bram_data_r = rx_data_ram_r[(16+RX_DATA_WIDTH-1):16]
rx_data_ram_r 是80位的数据
所以bram_data_r 就是第16位到第32位数据 也就是如下图所示的数据
SEL信号的情况
// In 2 Byte scenario, when align_comma_word=1, Comma can appear on any of the two bytes
// The comma is moved to the lower byte so that error checking can start
//在2字节场景中,当align_comma_word=1时,逗号可以出现在任何两个字节上
//逗号被移到低字节,以便开始错误检查
always @(posedge USER_CLK)
begin
if(reset_on_error_in_r2 || system_reset_r2) sel <= 2'b00;
else if (begin_r && !rx_chanbond_seq_r)
begin
// if Comma appears on BYTE0 ..
if((rx_data_r[(RX_DATA_WIDTH/2 - 1):0] == START_OF_PACKET_CHAR[7:0]) && rxctrl_r[0])
sel <= 2'b00;
// if Comma appears on BYTE1 ..
else if((rx_data_r[(RX_DATA_WIDTH-1):RX_DATA_WIDTH/2] == START_OF_PACKET_CHAR[7:0]) && rxctrl_r[1])
begin
sel <= 2'b01;
end
end
endrx_chanbond_seq_r 永远是0
START_OF_PACKET_CHAR 是02bc
RX_DATA_WIDTH 是16
rxctrl_r 是charisk信号
chanbondseq_in_data 长0
低字节 也就是数据正确的时候 sel 为0
高字节 也就是数据错误的时候 sel 为1
链路的状态机
文件程序如下:
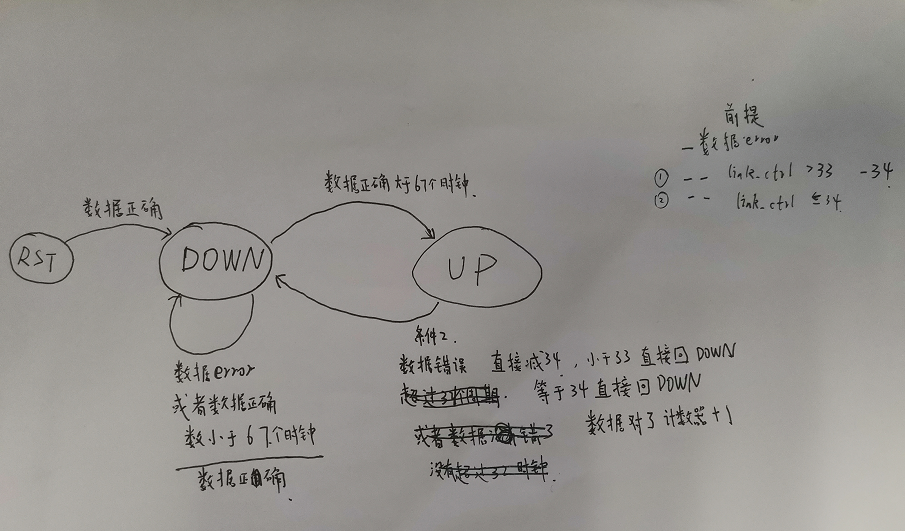
DOWN状态:
当链路计数器的初始值小于67时,链路被认为是断开的。当链路down时,计数器在所有PRBS位匹配的每一个周期递增,但当PRBS不匹配发生时复位。当链路计数达到67时(中间错一次就计数清零),切换到up状态。
UP状态:
当链路连通时,当出现PRBS失配时,链路计数器减少34,但当所有PRBS位都匹配时,链路计数器在每个周期只增加1,直到饱和点67。当链路计数器达到0(包括翻转保护)时,切换到链路down状态。
状态机转换图:
always @(posedge USER_CLK) begin
if(!track_data_r)
sm_link <= ST_LINK_DOWN;
else
case (sm_link)
// The link is considered to be down when the link counter initially has a value less than 67. When the link is
// down, the counter is incremented on each cycle where all PRBS bits match, but reset whenever any PRBS mismatch
// occurs. When the link counter reaches 67, transition to the link up state.
ST_LINK_DOWN: begin
if (error_detected_r !== 1'b0) begin
link_ctr <= 7'd0;
end
else begin
if (link_ctr < 7'd67)
link_ctr <= link_ctr + 7'd1;
else
sm_link <= ST_LINK_UP;
end
end
// When the link is up, the link counter is decreased by 34 whenever any PRBS mismatch occurs, but is increased by
// only 1 on each cycle where all PRBS bits match, up to its saturation point of 67. If the link counter reaches
// 0 (including rollover protection), transition to the link down state.
ST_LINK_UP: begin
if (error_detected_r !== 1'b0) begin
if (link_ctr > 7'd33) begin
link_ctr <= link_ctr - 7'd34;
if (link_ctr == 7'd34)
sm_link <= ST_LINK_DOWN;
end
else begin
link_ctr <= 7'd0;
sm_link <= ST_LINK_DOWN;
end
end
else begin
if (link_ctr < 7'd67)
link_ctr <= link_ctr + 7'd1;
end
end
endcase
end
assign TRACK_DATA_OUT = sm_link;状态机的作用:
TRACK_DATA_OUT ———输出链路有效信号 有效时候该信号为高电平
目前的问题
这个通道选择的模块没看懂
/___________________________ Code for Channel bonding ____________________
// code to prevent checking of clock correction sequences for the start of packet char
genvar i;
generate
for (i=0;i<CHANBOND_SEQ_LEN ;i=i+1)
begin:register_chan_seq
if(i==0)
FD rx_chanbond_reg_0 ( .Q (rx_chanbond_reg[i]), .D (input_to_chanbond_reg_i), .C(USER_CLK));
else
FD rx_chanbond_reg_i ( .Q (rx_chanbond_reg[i]), .D (rx_chanbond_reg[i-1]), .C(USER_CLK));
end
endgenerate
assign chanbondseq_in_data = |rx_chanbond_reg || input_to_chanbond_data_i;
assign rx_data_has_start_char_c = (rx_data_aligned[7:0] == START_OF_PACKET_CHAR[7:0]) && !chanbondseq_in_data && (|rxctrl_r3);
数据对齐模块
always @(posedge USER_CLK)
begin
if(system_reset_r2) rx_data_r3 <= 'h0;
else
begin
if(sel == 2'b01)
begin
rx_data_r3 <= `DLY {rx_data_r[(RX_DATA_WIDTH/2 - 1):0],rx_data_r2[(RX_DATA_WIDTH-1):RX_DATA_WIDTH/2]};
end
else rx_data_r3 <= `DLY rx_data_r2;
end
endrx_data_r3 这个数据就是对齐后的数据
自己修改的代码模块
16位同时检测,计算错误的比特点
把原来的代码16位一检测改成 每一位对应检测
//自己的误码率计算
wire error_detected_c0;
wire error_detected_c1;
wire error_detected_c2;
wire error_detected_c3;
wire error_detected_c4;
wire error_detected_c5;
wire error_detected_c6;
wire error_detected_c7;
wire error_detected_c8;
wire error_detected_c9;
wire error_detected_c10;
wire error_detected_c11;
wire error_detected_c12;
wire error_detected_c13;
wire error_detected_c14;
wire error_detected_c15;
reg error_detected_r0;
reg error_detected_r1;
reg error_detected_r2;
reg error_detected_r3;
reg error_detected_r4;
reg error_detected_r5;
reg error_detected_r6;
reg error_detected_r7;
reg error_detected_r8;
reg error_detected_r9;
reg error_detected_r10;
reg error_detected_r11;
reg error_detected_r12;
reg error_detected_r13;
reg error_detected_r14;
reg error_detected_r15;
assign error_detected_c0 = track_data_r3 && (rx_data_r_track[0] != bram_data_r[0]);
assign error_detected_c1 = track_data_r3 && (rx_data_r_track[1] != bram_data_r[1]);
assign error_detected_c2 = track_data_r3 && (rx_data_r_track[2] != bram_data_r[2]);
assign error_detected_c3 = track_data_r3 && (rx_data_r_track[3] != bram_data_r[3]);
assign error_detected_c4 = track_data_r3 && (rx_data_r_track[4] != bram_data_r[4]);
assign error_detected_c5 = track_data_r3 && (rx_data_r_track[5] != bram_data_r[5]);
assign error_detected_c6 = track_data_r3 && (rx_data_r_track[6] != bram_data_r[6]);
assign error_detected_c7 = track_data_r3 && (rx_data_r_track[7] != bram_data_r[7]);
assign error_detected_c8 = track_data_r3 && (rx_data_r_track[8] != bram_data_r[8]);
assign error_detected_c9 = track_data_r3 && (rx_data_r_track[9] != bram_data_r[9]);
assign error_detected_c10 = track_data_r3 && (rx_data_r_track[10] != bram_data_r[10]);
assign error_detected_c11 = track_data_r3 && (rx_data_r_track[11] != bram_data_r[11]);
assign error_detected_c12 = track_data_r3 && (rx_data_r_track[12] != bram_data_r[12]);
assign error_detected_c13 = track_data_r3 && (rx_data_r_track[13] != bram_data_r[13]);
assign error_detected_c14 = track_data_r3 && (rx_data_r_track[14] != bram_data_r[14]);
assign error_detected_c15 = track_data_r3 && (rx_data_r_track[15] != bram_data_r[15]);
always @(posedge USER_CLK)
if(!track_data_r)
error_detected_r0 <= `DLY 1'b0;
else
error_detected_r0 <= `DLY error_detected_c0;
always @(posedge USER_CLK)
if(!track_data_r)
error_detected_r1 <= `DLY 1'b0;
else
error_detected_r1 <= `DLY error_detected_c1;
always @(posedge USER_CLK)
if(!track_data_r)
error_detected_r2 <= `DLY 1'b0;
else
error_detected_r2 <= `DLY error_detected_c2;
always @(posedge USER_CLK)
if(!track_data_r)
error_detected_r3 <= `DLY 1'b0;
else
error_detected_r3 <= `DLY error_detected_c3;
always @(posedge USER_CLK)
if(!track_data_r)
error_detected_r4 <= `DLY 1'b0;
else
error_detected_r4 <= `DLY error_detected_c4;
always @(posedge USER_CLK)
if(!track_data_r)
error_detected_r5 <= `DLY 1'b0;
else
error_detected_r5 <= `DLY error_detected_c5;
always @(posedge USER_CLK)
if(!track_data_r)
error_detected_r6 <= `DLY 1'b0;
else
error_detected_r6 <= `DLY error_detected_c6;
always @(posedge USER_CLK)
if(!track_data_r)
error_detected_r7 <= `DLY 1'b0;
else
error_detected_r7 <= `DLY error_detected_c7;
always @(posedge USER_CLK)
if(!track_data_r)
error_detected_r8 <= `DLY 1'b0;
else
error_detected_r8 <= `DLY error_detected_c8;
always @(posedge USER_CLK)
if(!track_data_r)
error_detected_r9 <= `DLY 1'b0;
else
error_detected_r9 <= `DLY error_detected_c9;
always @(posedge USER_CLK)
if(!track_data_r)
error_detected_r10 <= `DLY 1'b0;
else
error_detected_r10 <= `DLY error_detected_c10;
always @(posedge USER_CLK)
if(!track_data_r)
error_detected_r11 <= `DLY 1'b0;
else
error_detected_r11 <= `DLY error_detected_c11;
always @(posedge USER_CLK)
if(!track_data_r)
error_detected_r12 <= `DLY 1'b0;
else
error_detected_r12 <= `DLY error_detected_c12;
always @(posedge USER_CLK)
if(!track_data_r)
error_detected_r12 <= `DLY 1'b0;
else
error_detected_r12 <= `DLY error_detected_c12;
always @(posedge USER_CLK)
if(!track_data_r)
error_detected_r13 <= `DLY 1'b0;
else
error_detected_r13 <= `DLY error_detected_c13;
always @(posedge USER_CLK)
if(!track_data_r)
error_detected_r14 <= `DLY 1'b0;
else
error_detected_r14 <= `DLY error_detected_c14;
always @(posedge USER_CLK)
if(!track_data_r)
error_detected_r15 <= `DLY 1'b0;
else
error_detected_r15 <= `DLY error_detected_c15;
//误码率控制信号
reg [WIDTH_ERR-1 : 0] error_count_r0;
reg [WIDTH_ERR-1 : 0] error_count_r1;
reg [WIDTH_ERR-1 : 0] error_count_r2;
reg [WIDTH_ERR-1 : 0] error_count_r3;
reg [WIDTH_ERR-1 : 0] error_count_r4;
reg [WIDTH_ERR-1 : 0] error_count_r5;
reg [WIDTH_ERR-1 : 0] error_count_r6;
reg [WIDTH_ERR-1 : 0] error_count_r7;
reg [WIDTH_ERR-1 : 0] error_count_r8;
reg [WIDTH_ERR-1 : 0] error_count_r9;
reg [WIDTH_ERR-1 : 0] error_count_r10;
reg [WIDTH_ERR-1 : 0] error_count_r11;
reg [WIDTH_ERR-1 : 0] error_count_r12;
reg [WIDTH_ERR-1 : 0] error_count_r13;
reg [WIDTH_ERR-1 : 0] error_count_r14;
reg [WIDTH_ERR-1 : 0] error_count_r15;
//BER 的16位的计算
always @(posedge USER_CLK)
if(system_reset_r2)
error_count_r0 <= `DLY 0;
else if(error_detected_r0)
error_count_r0 <= `DLY error_count_r0 + 1;
always @(posedge USER_CLK)
if(system_reset_r2)
error_count_r1 <= `DLY 0;
else if(error_detected_r1)
error_count_r1 <= `DLY error_count_r1 + 1;
always @(posedge USER_CLK)
if(system_reset_r2)
error_count_r2 <= `DLY 0;
else if(error_detected_r2)
error_count_r2 <= `DLY error_count_r2 + 1;
always @(posedge USER_CLK)
if(system_reset_r2)
error_count_r3 <= `DLY 0;
else if(error_detected_r3)
error_count_r3 <= `DLY error_count_r3 + 1;
always @(posedge USER_CLK)
if(system_reset_r2)
error_count_r4 <= `DLY 0;
else if(error_detected_r4)
error_count_r4 <= `DLY error_count_r4 + 1;
always @(posedge USER_CLK)
if(system_reset_r2)
error_count_r5 <= `DLY 0;
else if(error_detected_r5)
error_count_r5 <= `DLY error_count_r5 + 1;
always @(posedge USER_CLK)
if(system_reset_r2)
error_count_r6 <= `DLY 0;
else if(error_detected_r6)
error_count_r6 <= `DLY error_count_r6 + 1;
always @(posedge USER_CLK)
if(system_reset_r2)
error_count_r7 <= `DLY 0;
else if(error_detected_r7)
error_count_r7 <= `DLY error_count_r7 + 1;
always @(posedge USER_CLK)
if(system_reset_r2)
error_count_r8 <= `DLY 0;
else if(error_detected_r8)
error_count_r8 <= `DLY error_count_r8 + 1;
always @(posedge USER_CLK)
if(system_reset_r2)
error_count_r9 <= `DLY 0;
else if(error_detected_r9)
error_count_r9 <= `DLY error_count_r9 + 1;
always @(posedge USER_CLK)
if(system_reset_r2)
error_count_r10 <= `DLY 0;
else if(error_detected_r10)
error_count_r10 <= `DLY error_count_r10 + 1;
always @(posedge USER_CLK)
if(system_reset_r2)
error_count_r11 <= `DLY 0;
else if(error_detected_r11)
error_count_r11 <= `DLY error_count_r11 + 1;
always @(posedge USER_CLK)
if(system_reset_r2)
error_count_r12 <= `DLY 0;
else if(error_detected_r12)
error_count_r12 <= `DLY error_count_r12 + 1;
always @(posedge USER_CLK)
if(system_reset_r2)
error_count_r13 <= `DLY 0;
else if(error_detected_r13)
error_count_r13 <= `DLY error_count_r13 + 1;
always @(posedge USER_CLK)
if(system_reset_r2)
error_count_r14 <= `DLY 0;
else if(error_detected_r14)
error_count_r14 <= `DLY error_count_r14 + 1;
always @(posedge USER_CLK)
if(system_reset_r2)
error_count_r15 <= `DLY 0;
else if(error_detected_r15)
error_count_r15 <= `DLY error_count_r15 + 1;
//如果时序有问题 就在中间插入寄存器
wire [35:0] error_num;
assign error_num = error_count_r0 + error_count_r1 + error_count_r2 + error_count_r3 + error_count_r4 + error_count_r5 + error_count_r6 + error_count_r7 + error_count_r8 + error_count_r9 + error_count_r10 + error_count_r11 + error_count_r12 + error_count_r13 + error_count_r14 + error_count_r15 ;
计算一共出现了多少帧
利用rx_data_r_track 这个信号,统计一共出现了多少02bc 就可以刚好算出 整体的帧的数值
结果验证
02BC 0010 1011 1100
0304 0011 0000 0010
0504 0101 0000 0100
0100 0000 0001 0000 0000
bc00 1011 1100 0000 0000
几个重要的节点
计算误码率的节点
always @(posedge USER_CLK)
if(!track_data_r)
error_detected_r <= `DLY 1'b0;
else
error_detected_r <= `DLY error_detected_c;
//We count the total number of errors we detect. By keeping a count we make it less likely that we will miss
//errors we did not directly observe.
always @(posedge USER_CLK)
if(system_reset_r2)
error_count_r <= `DLY 9'd0;
else if(error_detected_r)
error_count_r <= `DLY error_count_r + 1;
assign error_detected_c = track_data_r3 && (rx_data_r_track != bram_data_r);读取RAM的节点
always @(posedge USER_CLK)
if(system_reset_r2 || (read_counter_i == (WORDS_IN_BRAM-1)))
begin
read_counter_i <= `DLY 10'd0;
end
else if (start_of_packet_detected_r && !track_data_r) //sel 延时6拍子 延时之后是0 之前是1 也就是&&sel
begin
read_counter_i <= `DLY 10'd0;
end
else
begin
read_counter_i <= `DLY read_counter_i + 10'd1;
enddata_error_detected_r
最重要的几条线:
- sel
- track_data_r
- error_detected_c
- error_detected_r
需要修改的地方
重要发现:
track_data_r 要长1就好办了
自己的修改
自己写一个计数器:start_of_packet_detected_c 是高电平时加一,然后最大是3
所以cnt ==3是真
第一个地方:434行 保证对齐之后 不再清零
else if (start_of_packet_detected_r && !track_data_r)
//sel 延时6拍子 延时之后是0 之前是1 也就是&&sel
begin
read_counter_i <= `DLY 10'd0;
end第二个地方:214行
assign next_track_data_c = (begin_r && start_of_packet_detected_r)
|| (track_data_r && !error_detected_r);后面||上!sel 让它变成长1
自己修改的代码
上面的改动
777行:else if (start_of_packet_detected_r && !track_data_r&&(cnt!=3))
557行: assign next_track_data_c = (begin_r && start_of_packet_detected_r)
|| (track_data_r && !error_detected_r)||(cnt==3);
其它的改动:
//参数
localparam WIDTH_ERR = 31;
//三个模块
//_______________________aligned_cnt_______________________
//buff 3 frame and keep its state
wire add_cnt;
wire end_cnt;
reg [2:0] cnt;
always @(posedge USER_CLK)begin
if(system_reset_r2)begin
cnt <= 0;
end
else if(add_cnt)begin
if(end_cnt)
cnt <= 3;
else
cnt <= cnt + 1;
end
end
assign add_cnt = start_of_packet_detected_c;
assign end_cnt = add_cnt && cnt==4-1 ;
//_______________________frame_num cnt_______________________
wire add_cnt1;
wire end_cnt1;
reg [31:0] frame_num;
always @(posedge USER_CLK)begin
if(system_reset_r2)begin
frame_num <= 0;
end
else if(add_cnt1)begin
if(end_cnt1)
frame_num <= 0;
else
frame_num <= frame_num + 1;
end
end
assign add_cnt1 = start_of_packet_detected_c;
assign end_cnt1 = add_cnt1 && frame_num==32'hffffffff ;
//_______________________ error_num one bit check _______________________
//自己的误码率计算
wire error_detected_c0;
wire error_detected_c1;
wire error_detected_c2;
wire error_detected_c3;
wire error_detected_c4;
wire error_detected_c5;
wire error_detected_c6;
wire error_detected_c7;
wire error_detected_c8;
wire error_detected_c9;
wire error_detected_c10;
wire error_detected_c11;
wire error_detected_c12;
wire error_detected_c13;
wire error_detected_c14;
wire error_detected_c15;
reg error_detected_r0;
reg error_detected_r1;
reg error_detected_r2;
reg error_detected_r3;
reg error_detected_r4;
reg error_detected_r5;
reg error_detected_r6;
reg error_detected_r7;
reg error_detected_r8;
reg error_detected_r9;
reg error_detected_r10;
reg error_detected_r11;
reg error_detected_r12;
reg error_detected_r13;
reg error_detected_r14;
reg error_detected_r15;
assign error_detected_c0 = track_data_r3 && (rx_data_r_track[0] != bram_data_r[0]);
assign error_detected_c1 = track_data_r3 && (rx_data_r_track[1] != bram_data_r[1]);
assign error_detected_c2 = track_data_r3 && (rx_data_r_track[2] != bram_data_r[2]);
assign error_detected_c3 = track_data_r3 && (rx_data_r_track[3] != bram_data_r[3]);
assign error_detected_c4 = track_data_r3 && (rx_data_r_track[4] != bram_data_r[4]);
assign error_detected_c5 = track_data_r3 && (rx_data_r_track[5] != bram_data_r[5]);
assign error_detected_c6 = track_data_r3 && (rx_data_r_track[6] != bram_data_r[6]);
assign error_detected_c7 = track_data_r3 && (rx_data_r_track[7] != bram_data_r[7]);
assign error_detected_c8 = track_data_r3 && (rx_data_r_track[8] != bram_data_r[8]);
assign error_detected_c9 = track_data_r3 && (rx_data_r_track[9] != bram_data_r[9]);
assign error_detected_c10 = track_data_r3 && (rx_data_r_track[10] != bram_data_r[10]);
assign error_detected_c11 = track_data_r3 && (rx_data_r_track[11] != bram_data_r[11]);
assign error_detected_c12 = track_data_r3 && (rx_data_r_track[12] != bram_data_r[12]);
assign error_detected_c13 = track_data_r3 && (rx_data_r_track[13] != bram_data_r[13]);
assign error_detected_c14 = track_data_r3 && (rx_data_r_track[14] != bram_data_r[14]);
assign error_detected_c15 = track_data_r3 && (rx_data_r_track[15] != bram_data_r[15]);
always @(posedge USER_CLK)
if(!track_data_r)
error_detected_r0 <= `DLY 1'b0;
else
error_detected_r0 <= `DLY error_detected_c0;
always @(posedge USER_CLK)
if(!track_data_r)
error_detected_r1 <= `DLY 1'b0;
else
error_detected_r1 <= `DLY error_detected_c1;
always @(posedge USER_CLK)
if(!track_data_r)
error_detected_r2 <= `DLY 1'b0;
else
error_detected_r2 <= `DLY error_detected_c2;
always @(posedge USER_CLK)
if(!track_data_r)
error_detected_r3 <= `DLY 1'b0;
else
error_detected_r3 <= `DLY error_detected_c3;
always @(posedge USER_CLK)
if(!track_data_r)
error_detected_r4 <= `DLY 1'b0;
else
error_detected_r4 <= `DLY error_detected_c4;
always @(posedge USER_CLK)
if(!track_data_r)
error_detected_r5 <= `DLY 1'b0;
else
error_detected_r5 <= `DLY error_detected_c5;
always @(posedge USER_CLK)
if(!track_data_r)
error_detected_r6 <= `DLY 1'b0;
else
error_detected_r6 <= `DLY error_detected_c6;
always @(posedge USER_CLK)
if(!track_data_r)
error_detected_r7 <= `DLY 1'b0;
else
error_detected_r7 <= `DLY error_detected_c7;
always @(posedge USER_CLK)
if(!track_data_r)
error_detected_r8 <= `DLY 1'b0;
else
error_detected_r8 <= `DLY error_detected_c8;
always @(posedge USER_CLK)
if(!track_data_r)
error_detected_r9 <= `DLY 1'b0;
else
error_detected_r9 <= `DLY error_detected_c9;
always @(posedge USER_CLK)
if(!track_data_r)
error_detected_r10 <= `DLY 1'b0;
else
error_detected_r10 <= `DLY error_detected_c10;
always @(posedge USER_CLK)
if(!track_data_r)
error_detected_r11 <= `DLY 1'b0;
else
error_detected_r11 <= `DLY error_detected_c11;
always @(posedge USER_CLK)
if(!track_data_r)
error_detected_r12 <= `DLY 1'b0;
else
error_detected_r12 <= `DLY error_detected_c12;
always @(posedge USER_CLK)
if(!track_data_r)
error_detected_r12 <= `DLY 1'b0;
else
error_detected_r12 <= `DLY error_detected_c12;
always @(posedge USER_CLK)
if(!track_data_r)
error_detected_r13 <= `DLY 1'b0;
else
error_detected_r13 <= `DLY error_detected_c13;
always @(posedge USER_CLK)
if(!track_data_r)
error_detected_r14 <= `DLY 1'b0;
else
error_detected_r14 <= `DLY error_detected_c14;
always @(posedge USER_CLK)
if(!track_data_r)
error_detected_r15 <= `DLY 1'b0;
else
error_detected_r15 <= `DLY error_detected_c15;
//误码率控制信号
reg [WIDTH_ERR-1 : 0] error_count_r0;
reg [WIDTH_ERR-1 : 0] error_count_r1;
reg [WIDTH_ERR-1 : 0] error_count_r2;
reg [WIDTH_ERR-1 : 0] error_count_r3;
reg [WIDTH_ERR-1 : 0] error_count_r4;
reg [WIDTH_ERR-1 : 0] error_count_r5;
reg [WIDTH_ERR-1 : 0] error_count_r6;
reg [WIDTH_ERR-1 : 0] error_count_r7;
reg [WIDTH_ERR-1 : 0] error_count_r8;
reg [WIDTH_ERR-1 : 0] error_count_r9;
reg [WIDTH_ERR-1 : 0] error_count_r10;
reg [WIDTH_ERR-1 : 0] error_count_r11;
reg [WIDTH_ERR-1 : 0] error_count_r12;
reg [WIDTH_ERR-1 : 0] error_count_r13;
reg [WIDTH_ERR-1 : 0] error_count_r14;
reg [WIDTH_ERR-1 : 0] error_count_r15;
//BER 的16位的计算
always @(posedge USER_CLK)
if(system_reset_r2)
error_count_r0 <= `DLY 0;
else if(error_detected_r0)
error_count_r0 <= `DLY error_count_r0 + 1;
always @(posedge USER_CLK)
if(system_reset_r2)
error_count_r1 <= `DLY 0;
else if(error_detected_r1)
error_count_r1 <= `DLY error_count_r1 + 1;
always @(posedge USER_CLK)
if(system_reset_r2)
error_count_r2 <= `DLY 0;
else if(error_detected_r2)
error_count_r2 <= `DLY error_count_r2 + 1;
always @(posedge USER_CLK)
if(system_reset_r2)
error_count_r3 <= `DLY 0;
else if(error_detected_r3)
error_count_r3 <= `DLY error_count_r3 + 1;
always @(posedge USER_CLK)
if(system_reset_r2)
error_count_r4 <= `DLY 0;
else if(error_detected_r4)
error_count_r4 <= `DLY error_count_r4 + 1;
always @(posedge USER_CLK)
if(system_reset_r2)
error_count_r5 <= `DLY 0;
else if(error_detected_r5)
error_count_r5 <= `DLY error_count_r5 + 1;
always @(posedge USER_CLK)
if(system_reset_r2)
error_count_r6 <= `DLY 0;
else if(error_detected_r6)
error_count_r6 <= `DLY error_count_r6 + 1;
always @(posedge USER_CLK)
if(system_reset_r2)
error_count_r7 <= `DLY 0;
else if(error_detected_r7)
error_count_r7 <= `DLY error_count_r7 + 1;
always @(posedge USER_CLK)
if(system_reset_r2)
error_count_r8 <= `DLY 0;
else if(error_detected_r8)
error_count_r8 <= `DLY error_count_r8 + 1;
always @(posedge USER_CLK)
if(system_reset_r2)
error_count_r9 <= `DLY 0;
else if(error_detected_r9)
error_count_r9 <= `DLY error_count_r9 + 1;
always @(posedge USER_CLK)
if(system_reset_r2)
error_count_r10 <= `DLY 0;
else if(error_detected_r10)
error_count_r10 <= `DLY error_count_r10 + 1;
always @(posedge USER_CLK)
if(system_reset_r2)
error_count_r11 <= `DLY 0;
else if(error_detected_r11)
error_count_r11 <= `DLY error_count_r11 + 1;
always @(posedge USER_CLK)
if(system_reset_r2)
error_count_r12 <= `DLY 0;
else if(error_detected_r12)
error_count_r12 <= `DLY error_count_r12 + 1;
always @(posedge USER_CLK)
if(system_reset_r2)
error_count_r13 <= `DLY 0;
else if(error_detected_r13)
error_count_r13 <= `DLY error_count_r13 + 1;
always @(posedge USER_CLK)
if(system_reset_r2)
error_count_r14 <= `DLY 0;
else if(error_detected_r14)
error_count_r14 <= `DLY error_count_r14 + 1;
always @(posedge USER_CLK)
if(system_reset_r2)
error_count_r15 <= `DLY 0;
else if(error_detected_r15)
error_count_r15 <= `DLY error_count_r15 + 1;
//如果时序有问题 就在中间插入寄存器
wire [34:0] error_num;
assign error_num = error_count_r0 + error_count_r1 + error_count_r2 + error_count_r3 + error_count_r4 + error_count_r5 + error_count_r6 + error_count_r7 + error_count_r8 + error_count_r9 + error_count_r10 + error_count_r11 + error_count_r12 + error_count_r13 + error_count_r14 + error_count_r15 ;
测试
仿真文件
共错4行5bit
16--1bit 36--2bit 423--1bit 507-----1bit
16行 1e1d ----1e3d
36行 110 0000 0101 0605 、、、、110 0000 1111 060f
423行 0c0b ----0c1b
507行 1413 ----- 1403
总体思路
帧计数器32位 2^32^个数据,所以总比特数是 2^32^×16×16 约等于10^12^个比特
一帧错5bit ,一共是2^32^帧 约为2.1×10^10^比特,所以log~2~(2.1×10^10^) = 34.32
所以总error的位数是35位 共分为16个单个比特计数器,每一个单个比特计数器是31位。
最后的结果
由图我们可以发现 每32帧也就是16*32=512 错了6bit ,仿真测试时候是6bit的tx文件

参考资料
(7条消息) xilinx A7 (artix 7)serdes GTP 生成的example例程注释解析_Shawge的博客-CSDN博客
///
// ____ ____
// / /\/ /
// /___/ \ / Vendor: Xilinx
// \ \ \/ Version : 3.6
// \ \ Application : 7 Series FPGAs Transceivers Wizard
// / / Filename : gtwizard_0_gt_frame_check.v
// /___/ /\
// \ \ / \
// \___\/\___\
//
//
// Module gtwizard_0_GT_FRAME_CHECK
// Generated by Xilinx 7 Series FPGAs Transceivers Wizard
//
//
// (c) Copyright 2010-2012 Xilinx, Inc. All rights reserved.
//
// This file contains confidential and proprietary information
// of Xilinx, Inc. and is protected under U.S. and
// international copyright and other intellectual property
// laws.
//
// DISCLAIMER
// This disclaimer is not a license and does not grant any
// rights to the materials distributed herewith. Except as
// otherwise provided in a valid license issued to you by
// Xilinx, and to the maximum extent permitted by applicable
// law: (1) THESE MATERIALS ARE MADE AVAILABLE "AS IS" AND
// WITH ALL FAULTS, AND XILINX HEREBY DISCLAIMS ALL WARRANTIES
// AND CONDITIONS, EXPRESS, IMPLIED, OR STATUTORY, INCLUDING
// BUT NOT LIMITED TO WARRANTIES OF MERCHANTABILITY, NON-
// INFRINGEMENT, OR FITNESS FOR ANY PARTICULAR PURPOSE; and
// (2) Xilinx shall not be liable (whether in contract or tort,
// including negligence, or under any other theory of
// liability) for any loss or damage of any kind or nature
// related to, arising under or in connection with these
// materials, including for any direct, or any indirect,
// special, incidental, or consequential loss or damage
// (including loss of data, profits, goodwill, or any type of
// loss or damage suffered as a result of any action brought
// by a third party) even if such damage or loss was
// reasonably foreseeable or Xilinx had been advised of the
// possibility of the same.
//
// CRITICAL APPLICATIONS
// Xilinx products are not designed or intended to be fail-
// safe, or for use in any application requiring fail-safe
// performance, such as life-support or safety devices or
// systems, Class III medical devices, nuclear facilities,
// applications related to the deployment of airbags, or any
// other applications that could lead to death, personal
// injury, or severe property or environmental damage
// (individually and collectively, "Critical
// Applications"). Customer assumes the sole risk and
// liability of any use of Xilinx products in Critical
// Applications, subject only to applicable laws and
// regulations governing limitations on product liability.
//
// THIS COPYRIGHT NOTICE AND DISCLAIMER MUST BE RETAINED AS
// PART OF THIS FILE AT ALL TIMES.
`timescale 1ns / 1ps
`define DLY #1
//***********************************Entity Declaration************************
(* DowngradeIPIdentifiedWarnings="yes" *)
module gtwizard_0_GT_FRAME_CHECK #
(
// parameter to set the number of words in the BRAM
parameter RX_DATA_WIDTH = 64,
parameter RXCTRL_WIDTH = 2,
parameter WORDS_IN_BRAM = 512,
parameter CHANBOND_SEQ_LEN = 1,
parameter COMMA_DOUBLE = 16'hf628,
parameter START_OF_PACKET_CHAR = 64'h00000000000000fb
)
(
// User Interface
input wire [(RX_DATA_WIDTH-1):0] RX_DATA_IN,
input wire [(RXCTRL_WIDTH-1):0] RXCTRL_IN,
output reg RXENPCOMMADET_OUT, // 未用,高电平有效信号,可实现字节边界对齐检测到plus COMMA模式时进行处理。
output reg RXENMCOMMADET_OUT, // 未用,高电平有效信号,可实现字节边界对齐检测到minus COMMA模式时进行处理。
output reg RX_ENCHAN_SYNC_OUT, // 未用,驱动mgt的enchansync端口进行通道绑定
input wire RX_CHANBOND_SEQ_IN, // 输入通道绑定序列,不绑定时为0
// Control Interface
input wire INC_IN, // 未用
output wire INC_OUT, // 非独立的收发测试时输出已开始进行COMMA检测,指示发送端地址递增
output wire PATTERN_MATCHB_OUT, // COMMA不匹配
input wire RESET_ON_ERROR_IN, // 通过将PATTERN_MATCHB_OUT输出给外部,由此产生出错后的复位
// Error Monitoring
output wire [7:0] ERROR_COUNT_OUT, // 错误数
// Track Data
output wire TRACK_DATA_OUT, // 指示接收到的数据是否符合预期
output wire RX_SLIDE, // 在对齐时要求GT滑动
// System Interface
input wire USER_CLK,
input wire SYSTEM_RESET
);
//***************************Internal Register Declarations********************
reg reset_on_error_in_r;
reg reset_on_error_in_r2;
(* ASYNC_REG = "TRUE" *) (* keep = "true" *)reg system_reset_r;
(* ASYNC_REG = "TRUE" *) (* keep = "true" *)reg system_reset_r2;
reg begin_r;
reg data_error_detected_r;
reg [8:0] error_count_r;
reg error_detected_r;
reg [9:0] read_counter_i;
reg [79:0] rom [0:511];
reg [(RX_DATA_WIDTH-1):0] rx_data_r;
reg [(RX_DATA_WIDTH-1):0] rx_data_r_track;
reg start_of_packet_detected_r;
reg track_data_r;
reg track_data_r2;
reg track_data_r3;
reg [79:0] rx_data_ram_r;
reg [(RX_DATA_WIDTH-1):0] rx_data_r2;
reg [(RX_DATA_WIDTH-1):0] rx_data_r3;
reg [(RX_DATA_WIDTH-1):0] rx_data_r4;
reg [(RX_DATA_WIDTH-1):0] rx_data_r5;
reg [(RX_DATA_WIDTH-1):0] rx_data_r6;
reg [(RXCTRL_WIDTH-1):0] rxctrl_r;
reg [(RXCTRL_WIDTH-1):0] rxctrl_r2;
reg [(RXCTRL_WIDTH-1):0] rxctrl_r3;
reg rx_chanbond_seq_r;
reg rx_chanbond_seq_r2;
reg rx_chanbond_seq_r3;
reg idle_slip_r;
reg slip_assert_r;
reg wait_state_r;
reg bit_align_r;
reg [6:0] wait_before_slip_r;
reg [6:0] wait_before_init_r;
reg [1:0] sel;
//*********************************Wire Declarations***************************
wire [(RX_DATA_WIDTH-1):0] bram_data_r;
wire error_detected_c;
wire next_begin_c;
wire next_data_error_detected_c;
wire next_track_data_c;
wire start_of_packet_detected_c;
wire chanbondseq_in_data;
wire input_to_chanbond_data_i;
wire input_to_chanbond_reg_i;
wire [(CHANBOND_SEQ_LEN-1):0] rx_chanbond_reg;
wire rxdata_or;
wire count_slip_complete_c;
wire next_idle_slip_c;
wire next_slip_assert_c;
wire wait_state_c;
wire [(RX_DATA_WIDTH-1):0] rx_data_aligned;
wire rx_data_has_start_char_c;
wire tied_to_ground_i;
wire [31:0] tied_to_ground_vec_i;
wire tied_to_vcc_i;
//*********************************Main Body of Code***************************
//_______________________ Static signal Assigments _______________________
assign tied_to_ground_i = 1'b0;
assign tied_to_ground_vec_i = 32'h0000;
assign tied_to_vcc_i = 1'b1;
//___________ synchronizing the async reset for ease of timing simulation ________
always@(posedge USER_CLK)
begin
system_reset_r <= `DLY SYSTEM_RESET;
system_reset_r2 <= `DLY system_reset_r;
end
always@(posedge USER_CLK)
begin
reset_on_error_in_r <= `DLY RESET_ON_ERROR_IN;
reset_on_error_in_r2 <= `DLY reset_on_error_in_r;
end
//______________________ Register RXDATA once to ease timing ______________
always @(posedge USER_CLK)
begin
rx_data_r <= `DLY RX_DATA_IN;
rx_data_r2 <= `DLY rx_data_r;
end
always @(posedge USER_CLK)
begin
rxctrl_r <= `DLY RXCTRL_IN;
end
//________________________________ State machine __________________________
// State registers
always @(posedge USER_CLK)
if(system_reset_r2)
{begin_r,track_data_r,data_error_detected_r} <= `DLY 3'b100;
else
begin
begin_r <= `DLY next_begin_c;
track_data_r <= `DLY next_track_data_c;
data_error_detected_r <= `DLY next_data_error_detected_c;
end
// Next state logic
assign next_begin_c = (begin_r && !start_of_packet_detected_r) // 产生启动请求信号,在该信号复位为高后且未收到已开始数据检测的指示时保持为高,或数据出错时
|| data_error_detected_r ;
assign next_track_data_c = (begin_r && start_of_packet_detected_r) // 产生检测数据跟踪请求,在启动为高后且收到开始检测到有效数据的指示时保持为高,或者已启动数据跟踪且未出错时
|| (track_data_r && !error_detected_r);
assign next_data_error_detected_c = (track_data_r && error_detected_r); // 已启动跟踪,且检测到了错误
assign start_of_packet_detected_c = rx_data_has_start_char_c; // 已开始检测到有效数据 //02bc对齐的时候 是高电平
always @(posedge USER_CLK)
start_of_packet_detected_r <= `DLY start_of_packet_detected_c;
// Registering for timing
always @(posedge USER_CLK)
track_data_r2 <= `DLY track_data_r;
always @(posedge USER_CLK)
track_data_r3 <= `DLY track_data_r2;
//______________________________ Capture incoming data ____________________
// 根据COMMA出现的位置将32b重新对齐
always @(posedge USER_CLK)
begin
if(system_reset_r2) rx_data_r3 <= 'h0;
else
begin
if(sel == 2'b01)
begin
rx_data_r3 <= `DLY {rx_data_r[(RX_DATA_WIDTH/4-1):0],rx_data_r2[(RX_DATA_WIDTH - 1):RX_DATA_WIDTH/4]};
end
else if(sel == 2'b10)
begin
rx_data_r3 <= `DLY {rx_data_r[(2*RX_DATA_WIDTH/4-1):0],rx_data_r2[(RX_DATA_WIDTH - 1):2*RX_DATA_WIDTH/4]};
end
else if(sel == 2'b11)
begin
rx_data_r3 <= `DLY {rx_data_r[(3*RX_DATA_WIDTH/4 - 1):0],rx_data_r2[(RX_DATA_WIDTH-1):3*RX_DATA_WIDTH/4]};
end
else rx_data_r3 <= `DLY rx_data_r2;
end
end
always @(posedge USER_CLK)
begin
if(system_reset_r2)
begin
rx_data_r4 <= `DLY 'h0;
rx_data_r5 <= `DLY 'h0;
rx_data_r6 <= `DLY 'h0;
rx_data_r_track <= `DLY 'h0;
end
else
begin
rx_data_r4 <= `DLY rx_data_r3;
rx_data_r5 <= `DLY rx_data_r4;
rx_data_r6 <= `DLY rx_data_r5;
rx_data_r_track <= `DLY rx_data_r6;
end
end
always @(posedge USER_CLK)
begin
if(system_reset_r2)
begin
rxctrl_r2 <= `DLY 'h0;
rxctrl_r3 <= `DLY 'h0;
end
else
begin
rxctrl_r2 <= `DLY rxctrl_r;
rxctrl_r3 <= `DLY rxctrl_r2;
end
end
assign rx_data_aligned = rx_data_r3;
//___________________________ Code for Channel bonding ____________________
// code to prevent checking of clock correction sequences for the start of packet char
always @(posedge USER_CLK)
begin
rx_chanbond_seq_r <= `DLY RX_CHANBOND_SEQ_IN;
rx_chanbond_seq_r2 <= `DLY rx_chanbond_seq_r;
rx_chanbond_seq_r3 <= `DLY rx_chanbond_seq_r2;
end
assign input_to_chanbond_reg_i = rx_chanbond_seq_r2; //一直为0
assign input_to_chanbond_data_i = tied_to_ground_i;
//______________ Code for Bit Slipping Logic______________
assign rxdata_or = |(rx_data_r|rx_data_r2|rx_data_r3); // 通道有收到数据
// State registers
always @(posedge USER_CLK)
if( (system_reset_r2 == 1'b1) | (wait_before_init_r[6] == 1'b0) | (rxdata_or == 1'b0) )
{idle_slip_r,slip_assert_r,wait_state_r} <= `DLY 3'b100;
else
begin
idle_slip_r <= `DLY next_idle_slip_c;
slip_assert_r <= `DLY next_slip_assert_c;
wait_state_r <= `DLY wait_state_c;
end
// Next state logic
assign next_idle_slip_c = (idle_slip_r & bit_align_r) | (wait_state_r & count_slip_complete_c); // slip操作空闲信号,当复为后且bit已对齐时,或者已完成执行滑窗后的等待
assign next_slip_assert_c = (idle_slip_r & !bit_align_r); // 继续执行slip,上一slip操作已完成,但bit仍未对齐
assign wait_state_c = (slip_assert_r) | (wait_state_r & !count_slip_complete_c); // slip请求已产生,但是等待操作还未完成,则持续等待
//_______ Counter for waiting clock cycles after RXSLIDE________
always @(posedge USER_CLK)
begin
if (!wait_state_r)
wait_before_slip_r <= `DLY 7'b000000;
else
wait_before_slip_r <= `DLY wait_before_slip_r + 1'b1; // slip操作等待计时器
end
//_______ Counter for waiting clock cycles before starting RXSLIDE operation________
//_______ Wait for 64 clock cycles to see if the RXDATA is already byte aligned. If not, start RXSLIDE operation
always @(posedge USER_CLK)
begin
if( (system_reset_r2 == 1'b1) | (rxdata_or == 1'b0) )
wait_before_init_r <= `DLY 7'b0000000;
else if (wait_before_init_r[6] == 1'b0) // 在启动接收前等待64clk
wait_before_init_r <= `DLY wait_before_init_r + 1'b1;
end
assign count_slip_complete_c = wait_before_slip_r[6];
always @(posedge USER_CLK)
begin
if( (system_reset_r2 == 1'b1) | (rxdata_or == 1'b0) ) begin
bit_align_r <= 1'b0;
end else begin
if( ({rx_data_r[23:0],rx_data_r2[31:24]} == START_OF_PACKET_CHAR) || ({rx_data_r[15:0],rx_data_r2[31:16]} == START_OF_PACKET_CHAR)
|| ({rx_data_r[7:0],rx_data_r2[31:8]} == START_OF_PACKET_CHAR) || (rx_data_r[31:0]== START_OF_PACKET_CHAR) )
begin
bit_align_r <= 1'b1; // 比较COMMA所有可能存在的4种情况以确定bit对齐
end
end
end
// Comma realignment logic might be needed. 4 levels of registering for RXDATA to meet timing
// In 4 Byte scenario, when align_comma_word=1, Comma can appear on any of the four bytes.
// { BYTE3 | BYTE2 | BYTE1 | BYTE0 } - Comma can appear on BYTE0/1/2/3
// If Comma appears on BYTE1/2/3, RX_DATA is realigned so that Comma appears on BYTE0 in rx_data_r_track
always @(posedge USER_CLK)
begin
if(reset_on_error_in_r2 || system_reset_r2) sel <= 2'b00;
else if (begin_r && !rx_chanbond_seq_r)
begin
// if Comma appears on BYTE3 ..
if((rx_data_r[(RX_DATA_WIDTH - 1) : 3*RX_DATA_WIDTH/4] == START_OF_PACKET_CHAR[7:0]) && rxctrl_r[3]) // rxctrl_r 指示COMMA出现的位置,并比较收的包头是否匹配
sel <= 2'b11;
// if Comma appears on BYTE2 ..
else if((rx_data_r[(3*RX_DATA_WIDTH/4 - 1):2*RX_DATA_WIDTH/4] == START_OF_PACKET_CHAR[7:0]) && rxctrl_r[2])
begin
sel <= 2'b10;
end
// if Comma appears on BYTE1 ..
else if((rx_data_r[(2*RX_DATA_WIDTH/4 - 1):RX_DATA_WIDTH/4] == START_OF_PACKET_CHAR[7:0]) && rxctrl_r[1])
begin
sel <= 2'b01;
end
// if Comma appears on BYTE0 ..
else if((rx_data_r[(RX_DATA_WIDTH/4 - 1):0] == START_OF_PACKET_CHAR[7:0]) && rxctrl_r[0])
begin
sel <= 2'b00;
end
end
end
//___________________________ Code for Channel bonding ____________________
// code to prevent checking of clock correction sequences for the start of packet char
genvar i;
generate
for (i=0;i<CHANBOND_SEQ_LEN ;i=i+1)
begin:register_chan_seq
if(i==0)
FD rx_chanbond_reg_0 ( .Q (rx_chanbond_reg[i]), .D (input_to_chanbond_reg_i), .C(USER_CLK));
else
FD rx_chanbond_reg_i ( .Q (rx_chanbond_reg[i]), .D (rx_chanbond_reg[i-1]), .C(USER_CLK));
end
endgenerate
assign chanbondseq_in_data = |rx_chanbond_reg || input_to_chanbond_data_i; // 未绑定始终为0
assign rx_data_has_start_char_c = (rx_data_aligned[7:0] == START_OF_PACKET_CHAR[7:0]) && !chanbondseq_in_data && (|rxctrl_r3); // 只要对齐后的数据有一byte匹配
//_____________________________ Assign output ports _______________________
//assign TRACK_DATA_OUT = track_data_r;
assign RX_SLIDE = slip_assert_r; // 输出slip信号
// Drive the enpcommaalign port of the gt for alignment
// Active-High signal that enables the byte boundary alignment process when the plus comma pattern is detected.
always @(posedge USER_CLK)
if(system_reset_r2) RXENPCOMMADET_OUT <= `DLY 1'b0;
else RXENPCOMMADET_OUT <= `DLY 1'b1;
// Drive the enmcommaalign port of the gt for alignment
// Active-High signal that enables the byte boundary alignment process when the minus comma pattern is detected.
always @(posedge USER_CLK)
if(system_reset_r2) RXENMCOMMADET_OUT <= `DLY 1'b0;
else RXENMCOMMADET_OUT <= `DLY 1'b1;
assign INC_OUT = start_of_packet_detected_c;
assign PATTERN_MATCHB_OUT = data_error_detected_r;
// Drive the enchansync port of the mgt for channel bonding
always @(posedge USER_CLK)
if(system_reset_r2) RX_ENCHAN_SYNC_OUT <= `DLY 1'b0;
else RX_ENCHAN_SYNC_OUT <= `DLY 1'b1;
//___________________________ Check incoming data for errors ______________
//An error is detected when data read for the BRAM does not match the incoming data
assign error_detected_c = track_data_r3 && (rx_data_r_track != bram_data_r); // 数据与ROM中不匹配
//We register the error_detected signal for use with the error counter logic
always @(posedge USER_CLK)
if(!track_data_r)
error_detected_r <= `DLY 1'b0;
else
error_detected_r <= `DLY error_detected_c;
//We count the total number of errors we detect. By keeping a count we make it less likely that we will miss
//errors we did not directly observe.
always @(posedge USER_CLK)
if(system_reset_r2)
error_count_r <= `DLY 9'd0;
else if(error_detected_r)
error_count_r <= `DLY error_count_r + 1;
//Here we connect the lower 8 bits of the count (the MSbit is used only to check when the counter reaches
//max value) to the module output
assign ERROR_COUNT_OUT = error_count_r[7:0];
localparam ST_LINK_DOWN = 1'b0;
localparam ST_LINK_UP = 1'b1;
reg sm_link = ST_LINK_DOWN;
reg [6:0] link_ctr = 7'd0;
always @(posedge USER_CLK) begin
if(!track_data_r)
sm_link <= ST_LINK_DOWN;
else
case (sm_link)
// The link is considered to be down when the link counter initially has a value less than 67. When the link is
// down, the counter is incremented on each cycle where all PRBS bits match, but reset whenever any PRBS mismatch
// occurs. When the link counter reaches 67, transition to the link up state.
ST_LINK_DOWN: begin
if (error_detected_r !== 1'b0) begin
link_ctr <= 7'd0;
end
else begin
if (link_ctr < 7'd67)
link_ctr <= link_ctr + 7'd1;
else
sm_link <= ST_LINK_UP;
end
end
// When the link is up, the link counter is decreased by 34 whenever any PRBS mismatch occurs, but is increased by
// only 1 on each cycle where all PRBS bits match, up to its saturation point of 67. If the link counter reaches
// 0 (including rollover protection), transition to the link down state.
ST_LINK_UP: begin
if (error_detected_r !== 1'b0) begin
if (link_ctr > 7'd33) begin
link_ctr <= link_ctr - 7'd34;
if (link_ctr == 7'd34)
sm_link <= ST_LINK_DOWN;
end
else begin
link_ctr <= 7'd0;
sm_link <= ST_LINK_DOWN;
end
end
else begin
if (link_ctr < 7'd67)
link_ctr <= link_ctr + 7'd1;
end
end
endcase
end
assign TRACK_DATA_OUT = sm_link;
//____________________________ Counter to read from BRAM __________________________
always @(posedge USER_CLK)
if(system_reset_r2 || (read_counter_i == (WORDS_IN_BRAM-1)))
begin
read_counter_i <= `DLY 10'd0;
end
else if (start_of_packet_detected_r && !track_data_r)
begin
read_counter_i <= `DLY 10'd0;
end
else
begin
read_counter_i <= `DLY read_counter_i + 10'd1;
end
//________________________________ BRAM Inference Logic _____________________________
//Array slice from dat file to compare against receive data
generate
if(RX_DATA_WIDTH==80)
begin : datapath_80
assign bram_data_r = rx_data_ram_r[(RX_DATA_WIDTH-1):0];
end
else
begin : datapath_16_20_32_40_64
assign bram_data_r = rx_data_ram_r[(16+RX_DATA_WIDTH-1):16];
end
endgenerate
`ifdef SIM
initial
begin
$readmemh("gt_rom_init_rx.dat",rom,0,511);
end
always @(posedge USER_CLK)
rx_data_ram_r <= `DLY rom[read_counter_i];
`else
always @(posedge USER_CLK)
rx_data_ram_r <= 'haa5555aa;//`DLY rom[read_counter_i];
`endif
endmodule 
 浙公网安备 33010602011771号
浙公网安备 33010602011771号