monocular 3D detection小结
smoke
参考https://zhuanlan.zhihu.com/p/452676265
monodle
通过大量密集实验(逐步用gt替换预测值测试),localization error是3d 检测的关键。
提出三点策略:
1.重新思考了2d中心和3d中心的不对齐影响(用3d center替换2d center能提高性能,且2d检测能作为辅助任务帮助3d检测)
2.去除较远样本,避免误导训练
3.提出新的3d IoU loss
训练loss
共7个loss
● 1个分类损失
○ heatmap-Focal Loss
● 2d 检测 2个loss
○ center offset-L1 loss
○ size-L1 loss
● 3d检测 4个loss
○ center offset- L1 loss
○ size- L1 loss
○ depth-uncertainty loss
○ heading angle-multi_bin loss(12 bins)
实验配置
batchsize=16
max-epoch=140 [90, 120]
lr=1.25e-3
adam
weight_deacy=1e-5
warmup 5epochs
augment:
random crop/scale (2d detection only)
random horizontal filp
inference:
nms 3x3 max pooling
score_thres=0.2
解读参考
https://blog.csdn.net/weixin_43799388/article/details/128449631?spm=1001.2014.3001.5502
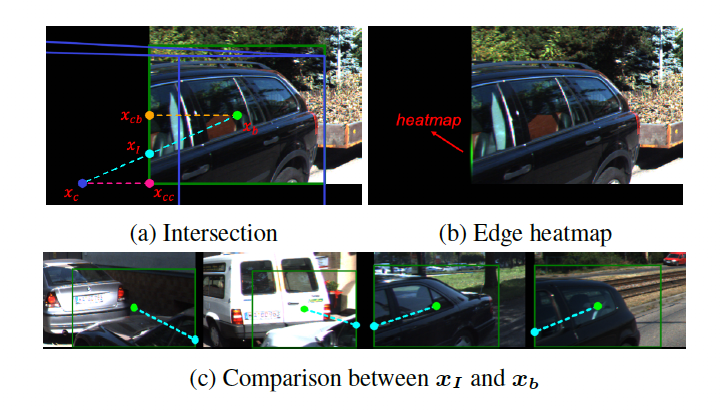
monoflex
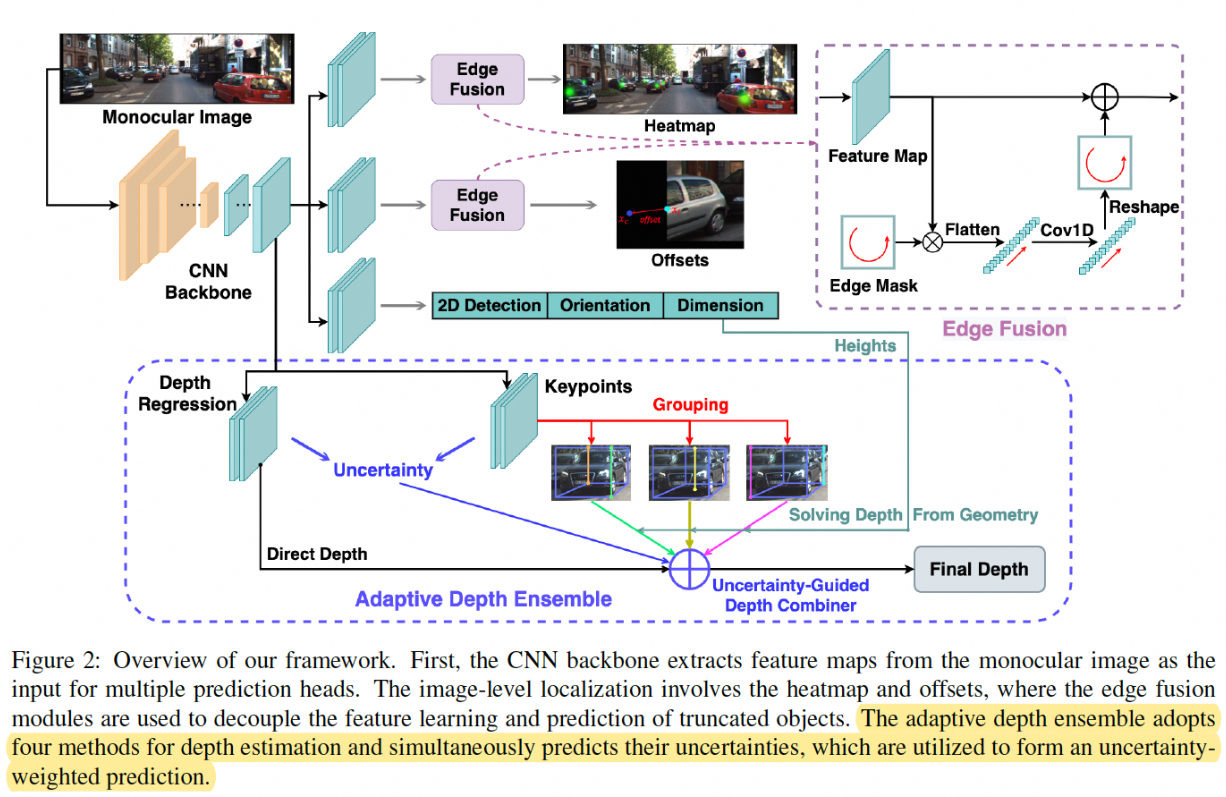
Edge heatmap
针对truncated(截断) 目标,区分普通目标,使用edge heatmap
uncertainty ensemble
不确定度建模使用在两方面:
1.直接回归depth。
2.几何关系。回归10个corner的2d位置,通过几何关系h2d和h3d,计算出三组depth,对这三组depth进行不确定性建模。
第一点同GUPNet,第二点GUPNet也利用了几何关系,但是对预测的h3d 不确定性建模。
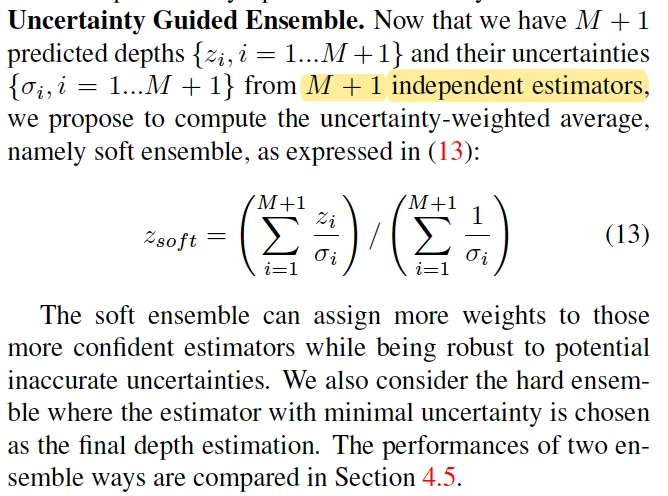
最终的深度使用soft ensemble方式得到:
解读参考
https://blog.csdn.net/weixin_43799388/article/details/128161179?spm=1001.2014.3001.5502
monoDDE
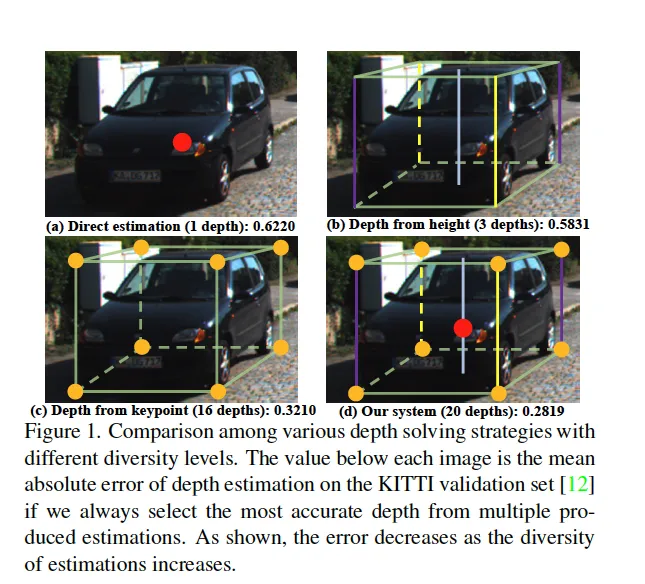
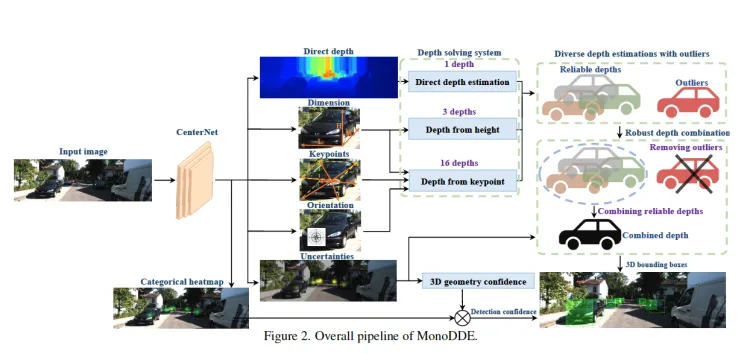
回归更多的深度信息,20个深度(1个直接深度、3个height depth、16个keypoint depth)
参考论文
https://blog.csdn.net/weixin_43799388/article/details/129369984?spm=1001.2014.3001.5502

 浙公网安备 33010602011771号
浙公网安备 33010602011771号