

Python图像处理(一)基本操作
(仅个人学习摘抄)
脚本命名千万千万不要用python里面的库还有什么文件名一样,会出错!!!
1. PIL
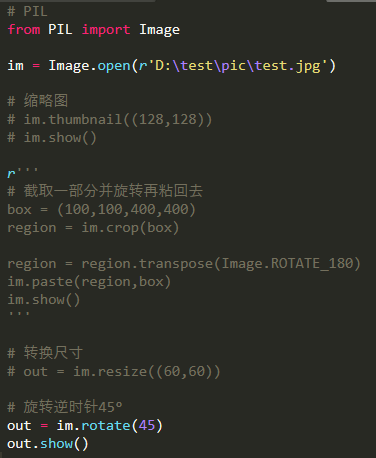
注意:打开图片的时候,地址斜杠再Python中有其他含义,所以要避免歧义
更多函数使用:https://effbot.org/imagingbook/image.htm
2. Matplotlib
2.1 绘制图像、点和线
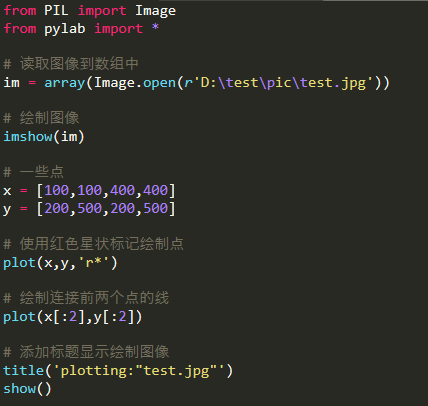
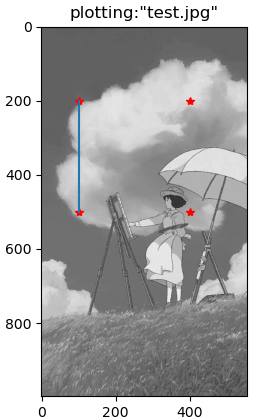
输出的图片,y 轴的原点是从上面往下的增加的,和其他的坐标系显示有点不一样。因为在 PyLab 库中,左上角是坐标原点。
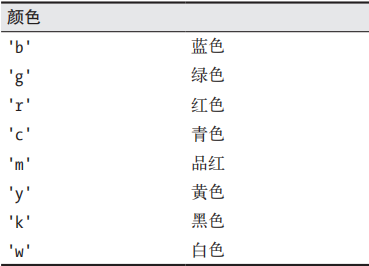
图像中,点标记和线默认的颜色是蓝色。
不显示坐标轴:axis('off')
matplotlib_1.py
2.2 图像轮廓和直方图
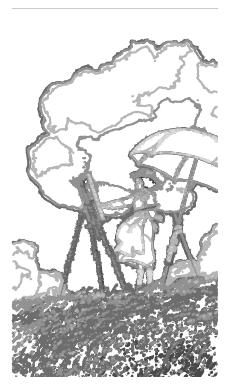
绘制图像的轮廓(或者其他二位函数的等轮廓线),首先需要将图像灰度化:
from PIL import Image
from pylab import *
# 读取图像到数组
im = array(Image.open(r'D:\test\pic\test.jpg').convert('L'))
# 新建一个图像
figure()
# 不使用颜色信息
gray()
# 在原点的左上角显示轮廓图像
contour(im, origin='image')
axis('equal')
axis('off')
# 直方图
figure()
hist(im.flatten(),128)
show()
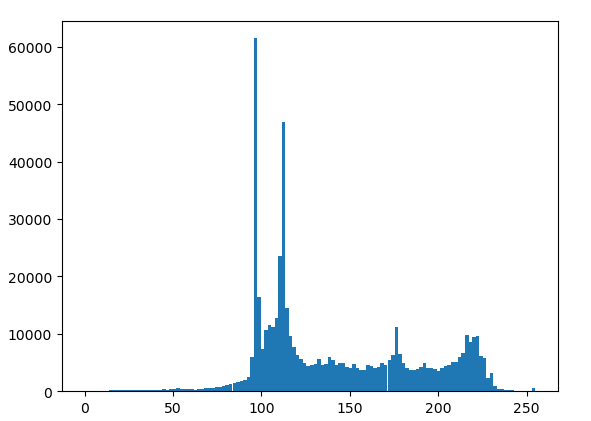
图像的直方图用来表征图像像素值的分布情况。用一定数目的小区间(bin)来指定表征像素值的范围,每个小区间会得到落入该小区间表示范围的像素数目。图像的直方图可以使用 hist() 函数绘制:
figure()
hist(im.flatten(),128)
show()
hist() 函数的第二个参数指定小区间的数目。因为 hist() 只接受一维数组作为输入,所以在绘制直方图之前,必须先对图像进行压平处理。flatten() 将任意数组按照行优先准则转换成一维数组。
2.3 交互式标注
通过 ginput() 函数实现交互式标注
# 交互式标注
from PIL import Image
from pylab import *
im = array(Image.open(r'D:\test\pic\test.jpg'))
imshow(im)
print('Please click 3 plots')
x = ginput(3)
print('you click:', x)
show()
在绘图区域单击三次,将会显示点击的坐标。
3. NumPy
3.1 图像数组表示
调用 array() 方法将图像转换成 NumPy 的数组对象,NumPy 中的数组十多维的,可以用来表示向量、矩阵和图像。

每行的第一个元组表示图像数组的大小(行、列、颜色通道),紧接着的字符串表示数组元素的数据类型。因为图像通常被编码成无符号八位整数(uint8),所以在第一种情况下,对图像进行灰度化处理,并且在创建数组时使用额外的参数 “f”;该参数将数据类型转换为浮点型。注意:由于灰度图像没有颜色信息,所以在形状元组中,它只有两个数值。
数组中的元素可以使用下标访问。位于坐标 i、j,以及颜色通道 k 的像素值可以如下访问:
value = im[i, j, k]
多个数组元素可以使用数组切片方式访问。切片方式返回的是以指定间隔下标访问该数组的元素值。
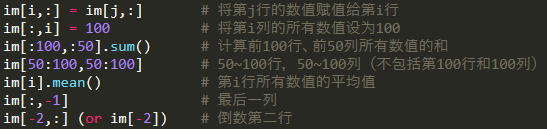
如果仅使用一个下标,则该下标为行下标。
3.2 灰度变换
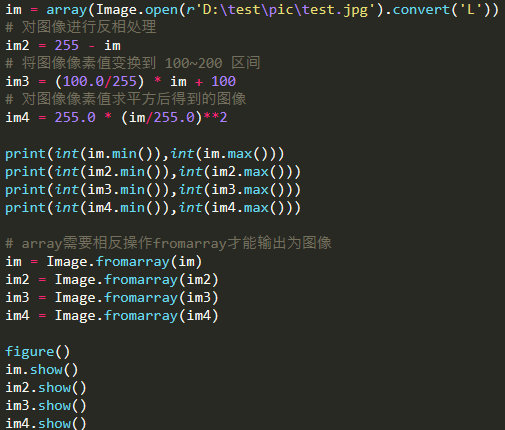
array() 变换的相反操作用 PIL 的 fromarray() 函数完成:
pil_im = Image.fromarray(im)
如果之前一些操作将“uint8”数据类型转换为其他数据类型,那么在创建 PIL 图像之前,需要将数据类型转换回来:
pil_im = Image.fromarray(uint8(im))
如果不确定输入的数据类型,安全起见,先转换回来。注意,NumPy 总是将数组数据类型转换成能够表示数据的“最低”数据类型。对浮点数做乘积或除法操作会使整数类型的数组变成浮点型。
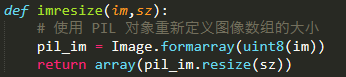
3.3 图像缩放
3.4 直方图均衡化
直方图均衡化是指将一幅图像的灰度直方图变平,使变换后的图像中每个灰度值的分布概率都相同。直方图均衡化是对图像灰度值进行归一化的非常好的方法,并且可以增强图像的对比度。
直方图均衡化的变换函数是图像中像素值的累积分布函数(cumulative distribution function,简称为 cdf,将像素值的范围映射到目标范围的归一化操作)。
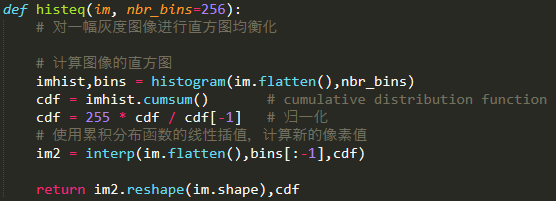
interp() 函数有两个输入参数,一个是灰度图像,一个是直方图中使用小区间的数目。函数返回直方图均衡化后的图像,和用来做像素值映射的累积分布函数。cdf[-1] 是为了归一化到 0~1 范围。
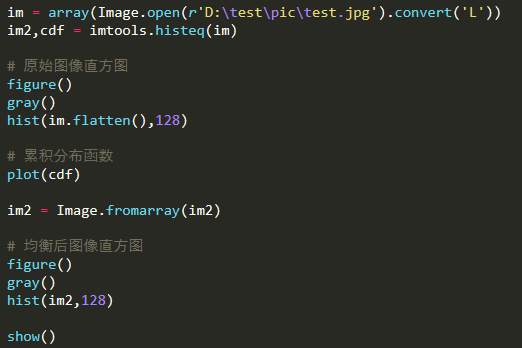
直方图均衡化后图像的对比度增强了,原先图像灰色区域的细节变得清晰。
调用其他 .py 文件中的函数,如上例:
① import imtools
imtools.histeq(im)
② from imtools import histeq
histeq(im)
3.5 图像平均
图像平均是减少噪声的一种简单的方式。
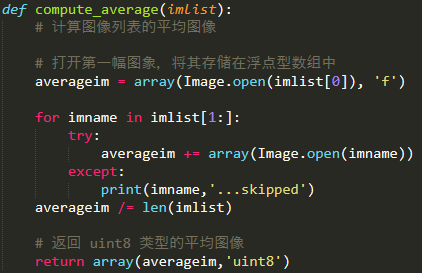
该函数可以直接跳过不能打开的图像。还可以使用 mean() 函数计算平均图像。mean() 函数需要将所有的图像堆积到一个数组中,比较占内存。
3.6 图像的主成分分析(PCA)
PCA(Principal Component Analysis,主成分分析)是一个非常有用的降维技巧。它可以在使用尽可能少维数的前提下,尽量多的保持训练数据的信息。一幅 100 X 100 像素的小灰度图像,也有 10000维,可以看成 10000 维空间中的一个点。PCA 产生的投影矩阵可以被视为将原始坐标变换到现有的坐标系,坐标系中的各个坐标按照重要性递减排列。
为了对图像数据进行 PCA 变换,图像需要转换成一维向量表示,可以用 NumPy 类库中的 flatten() 进行变换。
将变平的图像堆积起来,可以得到一个矩阵,矩阵的一行表示一幅图像。在计算主方向之前,所有的行图像按照平均图像进行了中心化。我们通常使用 SVD(Singular Value Decomposition,奇异值分解)方法来计算主成分;但当矩阵维数很大时,SVD 的计算非常慢,此时通常不用 SVD 分解。
PCA 操作代码:
from PIL import Image
from numpy import *
def pca(x):
''' 主成分分析:
输入:矩阵 X,其中该矩阵中存储训练数据,每一行为一条训练数据
返回:投影矩阵(按照维度的重要性排序)、方差和均值'''
# 获取维数
num_data,dim = X.shape
# 数据中心化
mean_X = X.mean(axis=0)
X = X - mean_X
if dim>num_data:
# PCA-使用紧致技巧
M = dot(X,X.T) # 协方差矩阵
e,EV = linalg.eigh(M) # 特征值和特征向量
tmp = dot(X.T,EV).T # 这就是紧致技巧
V = tmp[::-1] # 由于最后的特征向量是我们所需要的,所以需要将其逆转
S = aqrt(e)[::-1] # 由于特征值是按照递增顺序排列的,所以需要将其逆转
for i in range(V.shape[1]):
V[:i] /= S
else:
# PCA- 使用 SVD 方法
U,S,V = linalg.svd(X)
V = V[:num_data] # 仅仅返回前 num_data 维数据才合理
# 返回投影矩阵、方差和均值
return V,S,mean_X
该函数首先通过减去每一维的均值将数据中心化,然后计算协方差矩阵对应最大特征值的特征向量,此时可以使用简明的技巧或者 SVD 分解。这里使用 range() 函数,该函数的输入参数为一个整数 n,函数返回整数 0~(n-1) 的一个列表。也可以使用 arange() 函数返回一个数组,xrange() 函数返回一个产生器(可能会提升速度)。
如果数据个数小于向量的维数,不用 SVD 分解,而是计算维数更小的协方差矩阵 XXT 的特征向量。通过计算对应前 k(k 是降维后的维数)最大特征值的特征向量,可以使上面的 PCA 操作更快。
对图像进行 PCA 变换,图像的名称保存在列表 imlist 中,调用 pca.py 文件。
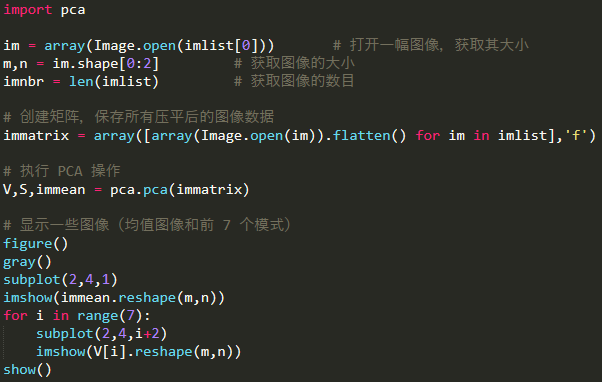
图像从一维表示转换成二维图像,使用 reshape() 函数。
3.7 pickle 模块
pickle 模块可以接受几乎所有的 Python 对象,并将其转换成字符串表示,该过程叫做封装(pickling)。从字符串表示中重构该对象,称为拆封(unpickling)。这些字符串表示可以方便的存储和传输。
例如保存上面的图像的平均图像和主成分:
在上例中,许多对象可以保存在同一个文件中。pickle 模块中有很多不同的协议可以生成 ,pkl 文件;如果不确定的话,最好以二进制文件的形式读取和写入。在其他 Python 会话中载入数据,只需要使用 load() 方法:
注意,载入对象的顺序必须和先前保存的一样。Python 中有一个用 C 语言写的优化版本,叫做 cpickle 模块,该模块和标准 pickle 模块完全兼容。
使用 with 语句处理文件的读写操作,可以自动打开和关闭文件(即使在文件打开时发生错误)。

4. SciPy
4.1 图像模糊
图像的高斯模糊是非常经典的图像卷积例子。本质上,图形模糊就是将(灰度)图像 I 和一个高斯核进行卷积操作:
Iσ = I*Gσ
其中 * 表示卷积操作;Gσ 是标准差为 σ 的二维高斯核,定义为:
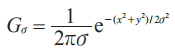
高斯模糊通常是图像处理操作的一部分,比如图像插值操作,兴趣点计算等。
SciPy 有用来做滤波操作的 scipy.ndimage.filters 模块。该模块使用快速一维分离的方式来计算卷积。
代码:scipy_1.py
4.2 图像导数
图像强度变化情况可以用灰度图像 I 的 x 和 y 方向导数 Ix 和 Iy 描述。
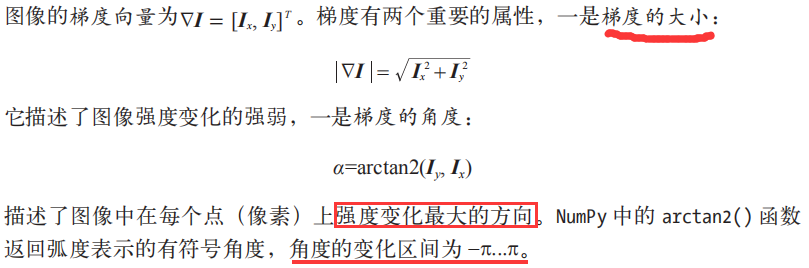
图像导数大多数可以通过卷积简单的实现:
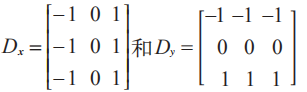
Ix=I*Dx 和 Iy = I*Dy
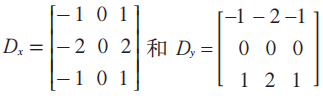
对于 Dx 和 Dy,通常选择 Prewitt 滤波器:
Sobel 滤波器:
from PIL import Image
from numpy import *
from pylab import *
from scipy.ndimage import filters
im = array(Image.open(r'D:\test\pic\test.jpg').convert('L'))
# Sobel 导数滤波器
imx = zeros(im.shape)
filters.sobel(im,1,imx)
imy = zeros(im.shape)
filters.sobel(im,0,imy)
magnitude = sqrt(imx**2+imy**2)
Sobel() 函数第二个参数用来表示选择 x 或者 y 方向导数(1:x 方向;0:y 方向),第三个参数保存输出的变量。正导数显示为亮的像素,负导数显示为暗的像素,灰色区域表示导数的值接近于零。
缺点:滤波器的尺寸需要随着图像分辨率的变化而变化。为了在噪声方面更加稳健,以及在任意尺度上计算导数,使用高斯导数滤波器。
Ix=I*Gσx 和 Iy = I*Gσy
其中,Gσx 和 Gσy 表示 Gσ 在 x 和 y 方向上的导数,Gσ 为标准差为 σ 的高斯函数。
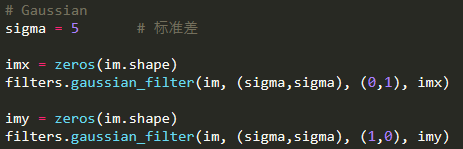
该函数的第三个参数指定对每个方向计算哪种类型的导数,第二个参数为使用的标准差。
4.3 形态学:对象计数
形态学(或数学形态学)是度量和分析基本形状的图像处理方法的基本框架与集合。形态学通常用于处理二值图像,但是也能够用于灰度图像。二值图像是指图像的每个像素只能取两个值,通常是 0 和 1。二值图像通常是,在计算物体的数目,或者度量其大小时,对一幅图像进行阈值化后的结果。
4.4 一些有用的 SciPy 模块
1、读写 .mat 文件
读取 Matlab 的 .mat 文件,使用 scipy.io 模块:
data = scipy.io.loadmat('test.mat')
data 对象包含一个字典,字典中的键对应于保存在原始 ,mat 文件中的变量名。由于这些变量是数组格式的,因此可以很方便的保存到 ,mat 文件中。只需创建一个字典(其中包含你想要保存的所有变量),然后使用 savemat() 函数:
data = {}
data['X'] = x
scipy.io.savemat('test.mat',data)
上面保存的是数组 x,所以当读到 Matlab 中时,变量的名字仍为 x。
2、以图象形式保存数组
imsave() 函数可以从 scipy.misc 模块中载入。要将数组 im 保存到文件中,可以使用下面的命令:
from scipy.misc import imsave
imsave('test.jpg',im)
scipy.misc 模块同样包含了著名的 Lena 测试图像:
lena = scipy.misc.lena()
返回一个 512X512 的灰度图像数组。
5. 图像去噪
ROF(Rudin-Osher-Fatemi)去噪模型。ROF 模型具有很好的性质:处理后的图像更平滑,同时保持图像边缘和结构信息。
ROF 模型去噪:
from numpy import *
def denoise(im,U_init,tolerance=0.1,tau=0.125,tv_weight=100):
''' 使用 A.Chanbolle(2005)在公式(11)中的计算步骤实现 Rudin-Osher-Fatemi(ROF)去噪模型
输入:含有噪声的输入图像(灰度图像)、U的初始值、YV正则项权值、步长、停业条件
输出:去噪和去除纹理后的图像、纹理残留'''
m,n = im.shape # 噪声图像的大小
# 初始化
U = U_init
Px = im # 对偶域的 x 分量
Py = im # 对偶域的 y 分量
error = 1
while(error > tolerance):
Uold = U
# 原始变量的梯度
GradUx = roll(U,-1,axis=1)-U # 变量 U 梯度的 x 分量
GradUy = roll(U,-1,axis=0)-U # 变量 U 梯度的 y 分量
# 更新对偶变量
PxNew = Px + (tau/tv_weight)*GradUx
PyNew = Py + (tau/tv_weight)*GradUy
NormNew = maximum(1,sqrt(PxNew**2+PyNew**2))
Px = PxNew/NormNew # 更新 x 分量(对偶)
Py = PyNew/NormNew # 更新 y 分量(对偶)
# 更新原始变量
RxPx = roll(Px,1,axis=1) # 对 x 分量进行向右 x 轴平移
RyPy = roll(Py,1,axis=0) # 对 y 分量进行向右 y 轴平移
DivP = (Px-RxPx)+(Py-RyPy) # 对偶域的散度
U = im + tv_weight*DivP # 更新原始变量
# 更新误差
error = linalg.norm(U-Uold)/sqrt(n*m)
return U,im-U # 去噪后的图像和纹理残留
利用一个合成图像调用该函数:
from PIL import Image
from numpy import *
from numpy import random
from scipy.ndimage import filters
import rof
# 使用噪声创建合成图像
im = zeros((500,500))
im[100:400,100:400] = 128
im[200:300,200:300] = 255
im = im + 30*random.standard_normal((500,500))
G = filters.gaussian_filter(im,10)
U,T = rof.denoise(im,im)
im = Image.fromarray(im)
im.show()
G = Image.fromarray(G)
G.show()
U = Image.fromarray(U)
U.show()
ROF 模型去噪后的图像保留了边缘和图像的结构信息,同时模糊了“噪声”。
学习书目《Python计算机视觉编程》
