《图像处理》第4章 频率域图像增强
(仅是个人学习摘抄)
4.1 背景知识

性质2 内积可诱导范数
在内积空间 U 中,若令

验证,满足范数的三条公理,故 U 是按内积导出的赋范线性空间。
进一步也可由范数导出距离

性质3 在内积空间 U 中,内积 (x,y) 是两个变元 x,y 的连续函数。
即当 xn → x,yn → y(按范数)时,数列 (xn,yn) → (x,y)
定义:Hilbert 空间
完备的内积空间 U 称为 Hilbert 空间,记作 H。
设在 H 空间中有一组非零的元素列(或点列){en},
① 若 (ei,ej) = 0 (i ≠ j),则称 {en} 为正交系;
② 若  则称 {en} 为规范正交系(或标准正交系)。
则称 {en} 为规范正交系(或标准正交系)。
注:规范正交系 {e1,e2,...,en,...} 中任一有限组![]() 线性无关。
线性无关。
定理2:H 空间中任意两个完全规范正交系 {e1,e2,...} 和 {e'1,e'2,...} 具有相同的基。(即 {en} 与 {e'n} 之间存在一一对应的关系)
定理3:无穷维 H 空间可分的 <=> H 中存在完全规范正交系。
内积空间:完备,可分 <=> 可分 Hilbert 空间
在 Hilbert 空间中,完备 <=> 可分
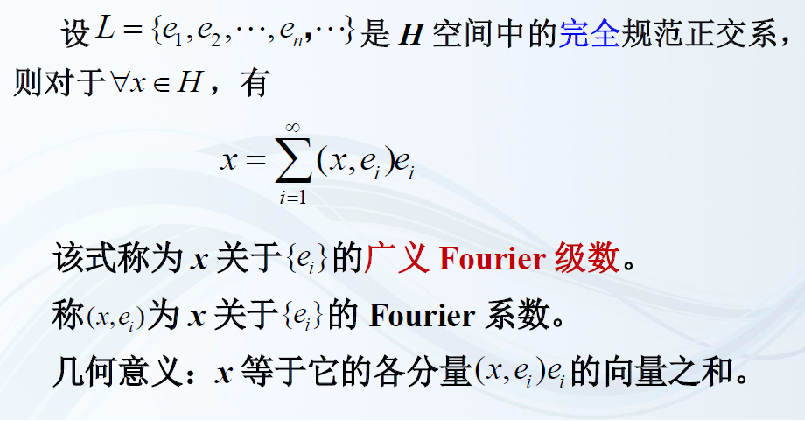
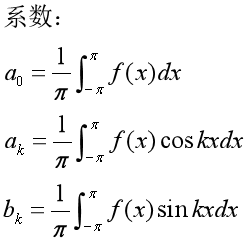
傅里叶级数:
任何周期函数都可以表示为不同频率的正弦 和/或 余弦和的形式。复杂函数可以用由简单的正弦和余弦函数表示。
在周期 2π 内:

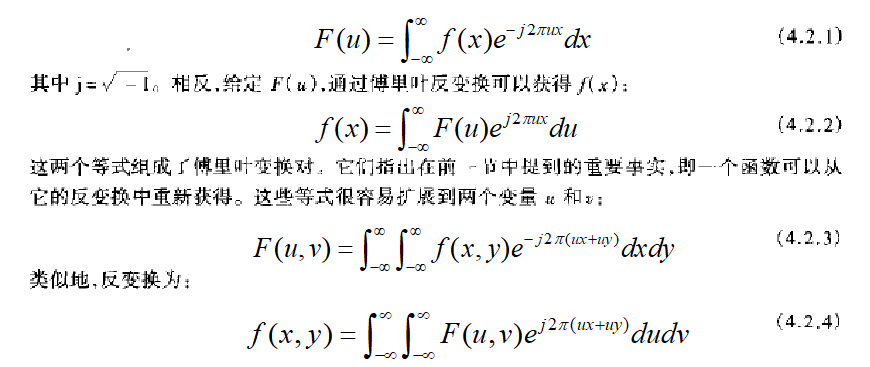
傅里叶变换:
甚至非周期函数(曲线是有限的情况下)也可以用正弦 和/或 余弦乘以加权函数的积分表示。
用傅里叶级数或变换表示的函数特征可以通过傅里叶反变换重建,不丢失任何信息。
傅里叶变换是线性系统分析的一个有力工具,它能够定量地分析诸如数字图像之类的数字化系统,把傅里叶变换的理论与物理解释相结合,将有利于解决大多数图像处理问题。
4.2 傅里叶变换和频率域的介绍
4.2.1 一维傅里叶变换及其反变换
单变量连续函数 f(x) 的傅里叶变换 F(u) 定义为:
离散形式的傅里叶变换:
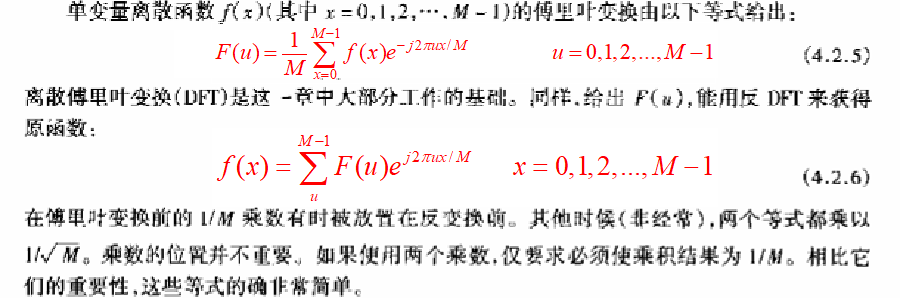
为了计算在式(4.2.5)中的 F(u),首先在指数项中代入 u = 0,然后,将所有 x 值相加。之后,在指数项中代入 u = 1,重复对所有 x 的相加。对所有 M 个 u 值重复这一过程,从而可获得完整的傅里叶变换。这个过程花费了将近 M2 个加法和乘法来计算离散傅里叶变换。像 f(x) 一样,变换在数量上也是离散的,有着与 f(x) 相同数量的分量。
频率域的概念,从欧拉公式中得到:

将此表达式代入式(4.2.5)中,使用公式 cos( -θ ) = cosθ,得出:
 u = 0,1,2,...,M-1
u = 0,1,2,...,M-1
因此傅里叶变换的每一项(即对于每个u值,F(u)的值)由 f(x) 函数所有值的和组成。
f(x) 的值与各种频率的正弦值和余弦值相乘。F(u) 值的范围覆盖的域(u的值)称为频率域,因为 u 决定了变换的频率成分。F(u) 的 M 项中的每一个被称为变换的频率分量。
傅里叶变换可看成“数学的棱镜”,将函数基于频率分成不同的成分。使我们能够通过频率成分来分析一个函数。
用极坐标表示 F(u) 比较方便:
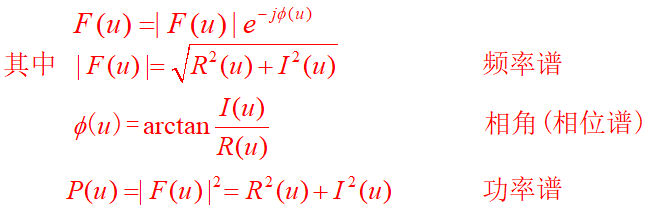
R(u) 和 I(u) 分别为 F(u) 的实部和虚部。
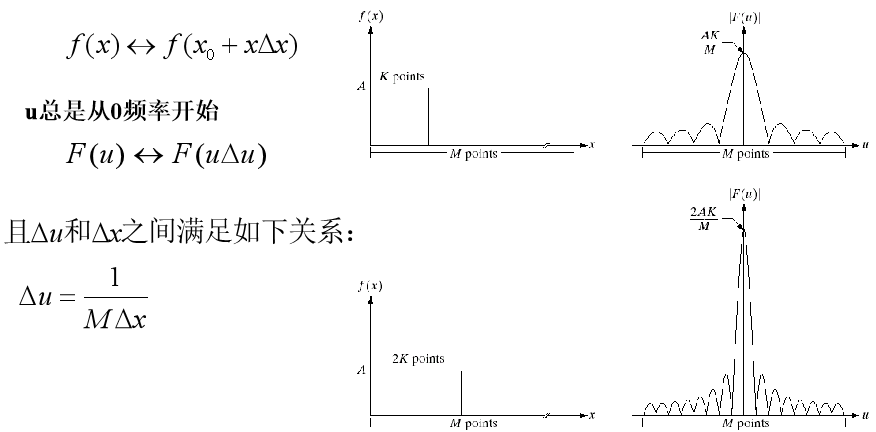
在离散傅里叶变换中,函数 f(x) 中 x 的取值不一定是 [0,M-1] 中的整数值,而是任意选取的等间隔点。
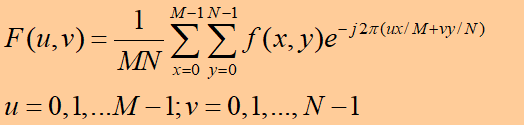
4.2.2 二维 DFT 及其反变换
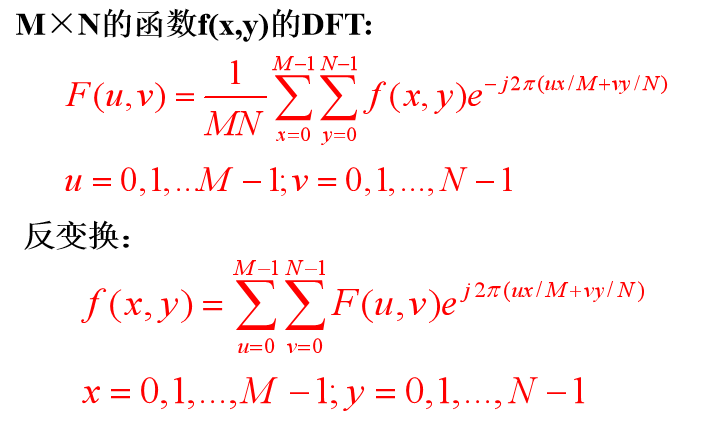
1、二维变换的傅里叶谱、相角、频率谱:
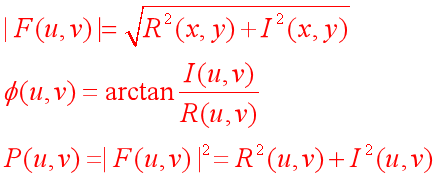
当 u = 0,v = 0 时
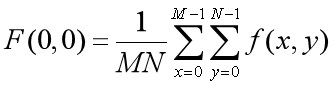
为 f(x,y) 的平均值,即原点处的傅里叶变换等于图像的平均灰度级。
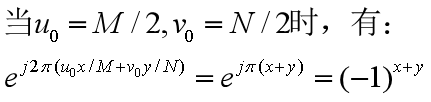
通常在进行傅里叶变换之前用 (-1)x+y 乘以输入的图像函数
![]()
将傅里叶变换的原点(即 F(0,0))被设置在 u=M/2,v=N/2 上,该点为二维 DFT 设置的 MXN 区域的中心。
为确保移动后的坐标为整数,要求 M,N 为偶数。当在计算机中使用傅里叶变换时,总和的范围为 u 从 1 到 N。实际的变换中心将为 u=(M/2)+1 和 v=(N/2)+1。
2、二维傅里叶变换的基本性质:平移

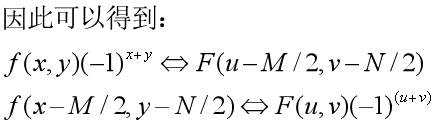
可以用于中心化变换,u 和 v 的范围分别为 [0,M-1] 和 [0,N-1],变换后的中心变为 u=(M/2)+1,v=(N/2)+1
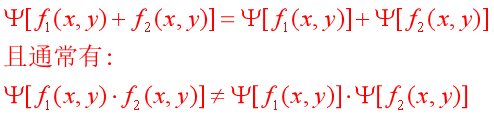
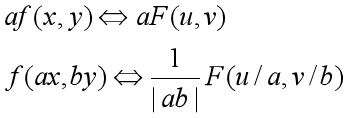
3、二维傅里叶变换的基本性质:分配性和比例变换性
傅里叶变换对加法具有分配性,对乘法没有:
比例变换:对于比例因子 a 和 b,有
4、二维傅里叶变换的基本性质:旋转
若引入极坐标 x = rcosθ,y = rsinθ,u = wcosφ,v = wsinφ,那么 f(x,y) 和 F(u,v) 分别变成 ƒ(r,θ) 和 F(w,φ),有


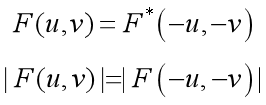
5、二维傅里叶变换的基本性质:周期性和对称性
周期性:

共轭对称性:
6、二维傅里叶变换的基本性质:可分性
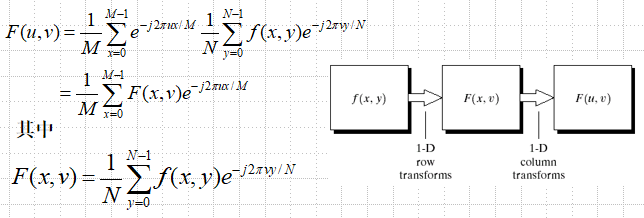
对于每个 x 值,当 v = 0,1,2,...,N-1 时,该等式是完整的一维傅里叶变换。即 F(x,v) 是沿着 f(x,y) 的一行所进行的傅里叶变换。当 y 由 0 变为 N-1 时,沿着 f(x,y) 的所有行计算傅里叶变换。然而频率变量 x 仍然保持不变。为完成二维变换,将 x 值 从0 变到 M-1,这涉及沿 F(x,v) 的每一列计算一维变换。(一维到二维:先变 y,沿所有行进行一维变换;再变 x,沿一维变换后的所有列进行一维变换)
可以通过先沿输入图像的每一行计算一维变换,然后沿中间结果的每一列再计算一维变换的方法来求二维变换。
7、二维傅里叶变换的基本性质:卷积定理
在泛函分析中,卷积是通过两个函数 f 和 g 生成第三个函数的一种数学算子,表征函数 f 与经过翻转和平移的 g 的重叠部分的累积。

对于离散域的函数,定义为:
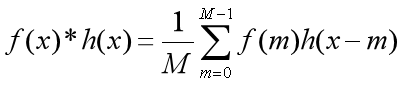
大小为 MXN 的两个函数 f(x,y) 和 h(x,y) 的离散卷积表示为 f(x,y)*h(x,y)

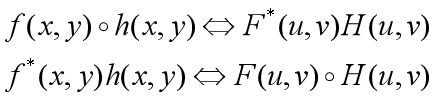
卷积理论由两个函数和它们的傅里叶变换间的下述关系组成:
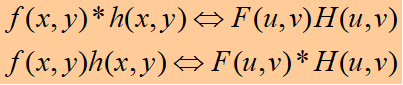
时域卷积等于频域乘积;时域乘积等于频域卷积。
采用 DFT 可以在频域进行卷积运算,但函数被看成周期函数,从而会引起错误。
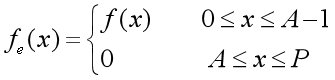
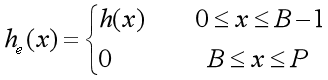
避免周期混淆的方法:
假设 f 和 h 分别由 A 和和 B 个点组成,那么对两个函数同时添加零,以使它们具有相同的周期,表示为 P,这个过程产生扩展或延拓的函数,如下所示:P = A + B
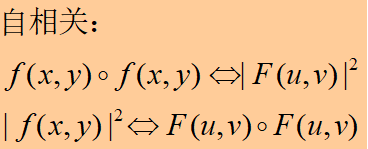
8、二维傅里叶变换的基本性质:相关性
大小为 MXN 的两个函数 f(x,y) 和 h(x,y) 的相关性定义如下:

相关理论由两个函数和它们的傅里叶变换间的下述关系组成:
相关的重要用途在于匹配,用于确定是否包含有感兴趣的物体或区域。
相关计算 ”º“ 其实质是卷积运算。
4.2.3 快速傅里叶变换
离散傅里叶变换称为信号处理的一种基础工具的一个主要原因是快速傅里叶变换的发展。直接计算 M 点的一维傅里叶变换需要 M2 次的乘法/加法运算。快速傅里叶变换完成相同的任务只需进行 Mlog2M 次运算。
考虑一维的情况,二维可以通过相继的一维变换得到
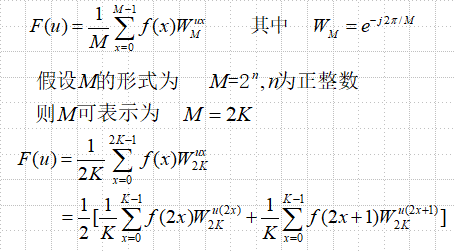
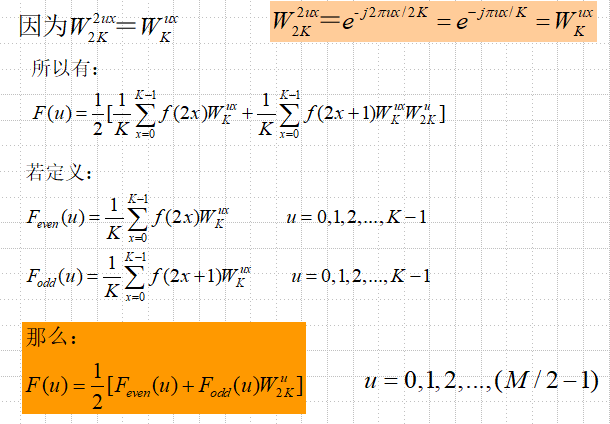
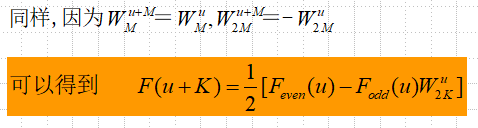
分析上面的式子,可以发现一个 M 点变换可以通过把原始表达式分成两个部分来计算。计算 F(u) 的前半部分要对 Feven 和 Fodd 给出的两个 M/2 点变换进行计算。将 Feven 和 Fodd 代入 F(u) 即得 F(u),u=0,1,2,...,(M/2-1)。而另外一半可直接从 F(u+K) 得到,而无需另外的变换计算。
可以分析,快速傅里叶变换的时间复杂度为:Mlog2M
快速傅里叶变换相当于一维离散傅里叶变换的计算优势定义为:
C(M) = M/log2M
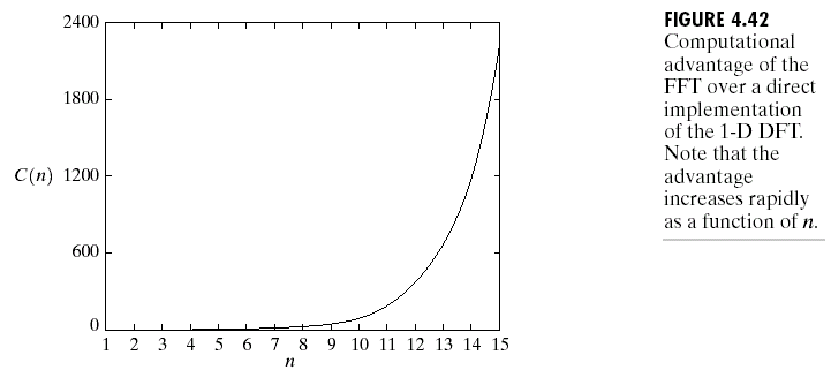
当 n 增加时,快速傅里叶变换的算法优势越来越明显
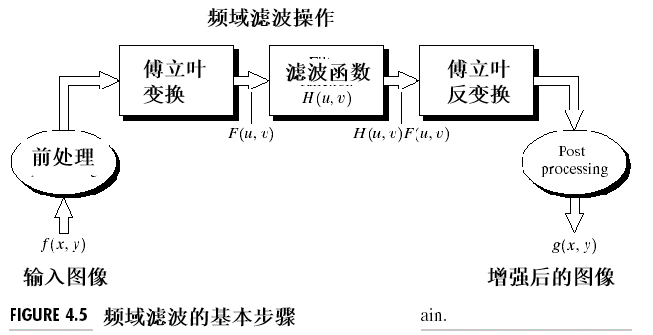
在频率域中的滤波是简单明了的。如下步骤:
(1)用 (-1)x+y 乘以输入图像来进行中心变换,如![]() 所示。
所示。
(2)由(1)计算图像的 DFT,即 F(u,v)。
(3)用滤波器函数 H(u,v) 乘以 F(u,v)。
(4)计算(3)中结果的反 DFT。
(5)得到(4)中结果的实部。
(6)用 (-1)x+y 乘以(5)中结果。
H(u,v) 被称为滤波器("滤波器传递函数")的原因是它在变换中抑制某些频率而其他频率不受影响。
输出图像:
![]()
被滤波的图像可以通过傅里叶反变换得到:
![]()
4.2.4 一些滤波器及其性质
① 陷波滤波器
② 低通滤波器
③ 高通滤波器
在傅里叶变换中,低频主要决定图像在平滑区域中总体灰度级的显示,而高频决定图像细节部分,如边缘和噪声。
4.2.5 空间域滤波和频率域滤波之间的对应关系
1、频率域与空间域之间的基本联系由卷积定理建立
将图像的模板在图像中逐像素移动,并对每个像素进行指定数量的计算的过程就是卷积过程。
大小为 MXN 的两个函数 f(x,y) 和 h(x,y) 离散卷积表示为 f(x,y)*h(x,y):

用 F(u,v) 和 H(u,v) 分别表示 f(x,y) 和 h(x,y) 的傅里叶变换,卷积定理:

空间域和频率域中的滤波器组成了傅里叶变换对。
h(x,y) <=> H(u,v)
因此,给出在频率域的滤波器,可以通过将前者进行反傅里叶变换而得到在空间域相应的滤波器,反之亦然。
指定的频率域滤波器和空间域滤波器具有相同的尺寸。如果两个滤波器具有相同尺寸,通常在频率域进行滤波计算更为有效。而空间域更适合用于更小的滤波器。
滤波在频域中更为直观,但在空间域使用更小的滤波器模板更为明智。
可以在频率域指定滤波器,做反变换,然后在空间域使用结果滤波器作为在空间域构建更小的滤波器模板的指导。
2、基于高斯函数的滤波具有特殊重要性
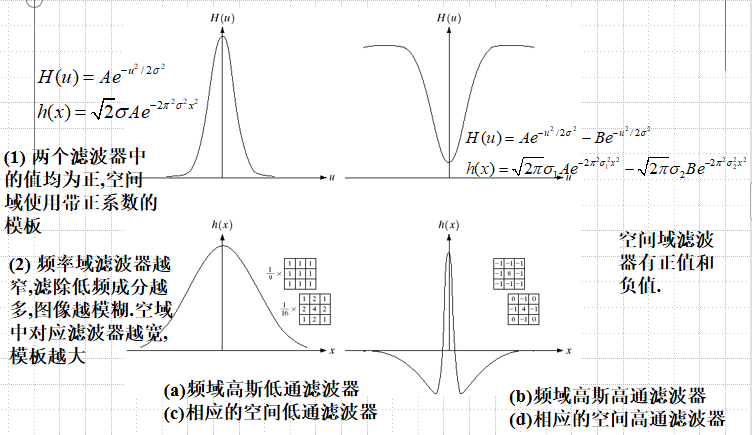
频率域高斯滤波函数:
![]()
对应的空间域滤波器:
![]()
(1)两函数组成傅里叶变换对,成分均为实高斯函数,非常有助于分析
(2)两个函数相互作用:
① 当 H(u) 有很宽的轮廓时(大的 σ 值),h(x) 有很窄的轮廓,反之亦然。
② 当 σ 接近无穷大时,H(u) 趋于常量函数,h(x) 趋于冲激函数。
频率域可以看成一个实验室,从中利用频率成分和图像外表之间的对应关系。
一些在空间域直接表达非常困难,甚至是不可能的增强任务在频率域中变得非常的普通。一旦通过频率域实验选择了空间滤波,通常实际实施都在空间域进行。
4.3 平滑的频率域滤波器
频域滤波器模型:
![]()
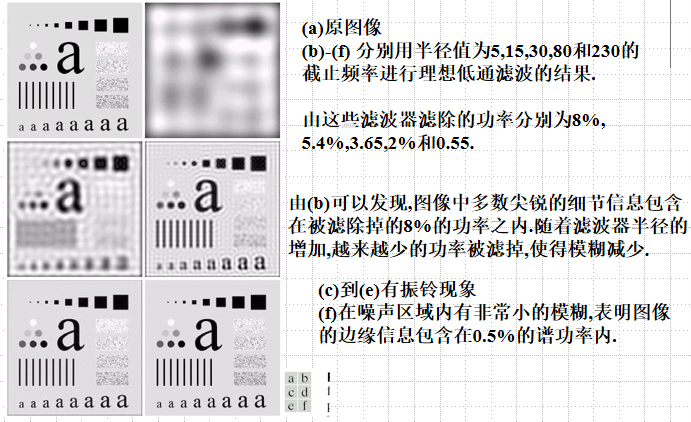
1、理想低通滤波器
其中,![]()
频率矩形的中心在 (u,v) = (M/2,N/2)
在半径为 D0 的圆内,所有频率没有衰减的通过滤波器,而在此半径的圆之外的所有频率被完全衰减掉。
对于不同的低通滤波器,通过研究其在具有相同的截止频率时所表现的不同特性来进行比较。
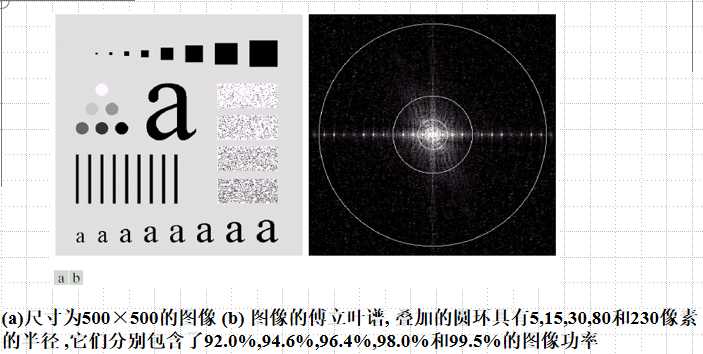
建立一组标准截止频率位置的方法是计算包含图像总功率值 PT 特定量的圆环。图像总功率值:

原点在频率矩形的中心,半径为 r 的圆包含的功率为:

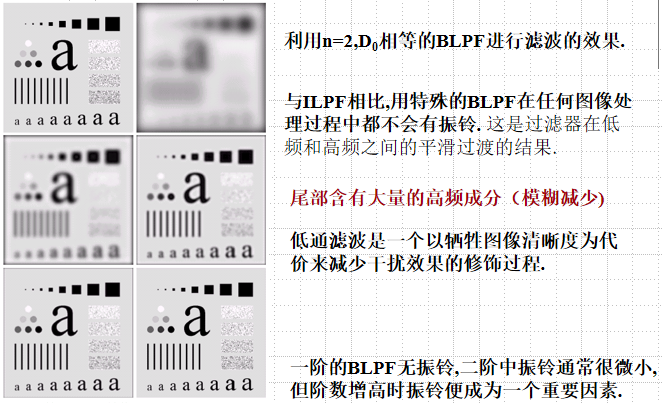
2、巴特沃斯低通滤波器
n 级巴特沃斯低通滤波器(BLPF)的传递函数为:

与 ILBF 相比,BLPF 变换函数在通带与被滤除的频率之间没有明显的截断。截断频率的位置位于 H(u,v)=0.5 的点。
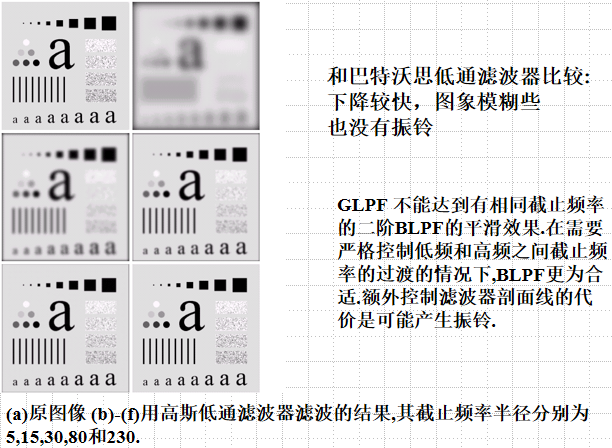
3、高斯低通滤波器
高斯低通滤波器的二维形式:
![]()
D(u,v) 是距傅里叶变换原点的距离,σ 表示高斯曲线的扩散程度。
若使 σ = D0,则可表示为:

其中,D0 是截止频率,当 D(u,v) = D0 时,滤波器下降到它最大值的 0.607 处。
高斯曲线的傅里叶反变换也是高斯曲线,因此根据高斯低通滤波器的傅里叶反变换而得到的空间高斯滤波器将没有振铃。
4.4 频率域锐化滤波器
4.4.1 高通滤波器
通过衰减傅里叶变换的高频成分可以使图像模糊。由于在灰度级的边缘和其他地方的急剧变化与高频成分有关,图像的锐化能够在频率域用高通滤波处理实现。
高通滤波器的传递函数可有下面的关系式得到:
![]()
其中,Hhp(u,v) 是相应低通滤波器的传递函数。
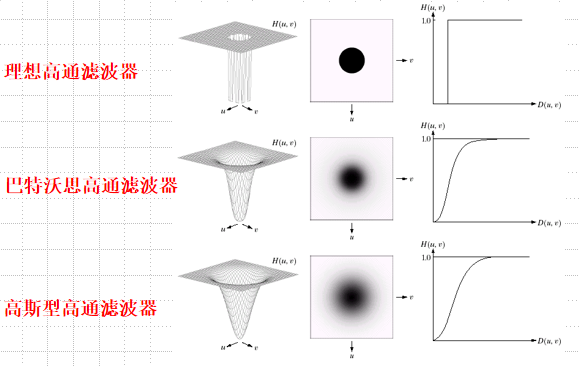
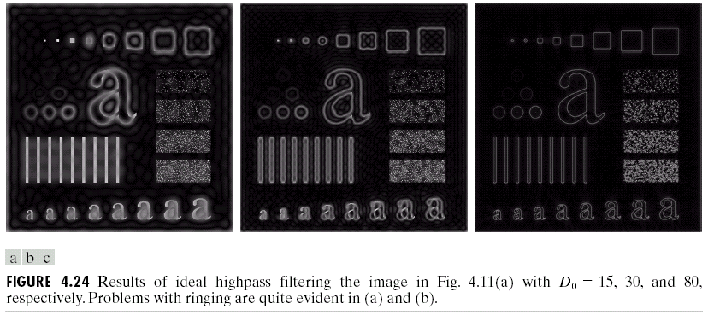
1、二维理想高通滤波器(IHPF)
二维理想高通滤波器定义如下:
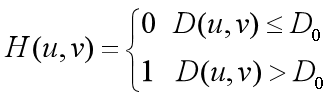
其中 D0 是指定的非负数值,D(u,v) = [(u - M/2)2 + (v - N/2)2]1/2
这个滤波器与理想低通滤波器是相对的,它将以 D0 为半径的圆周内的所有频率置零,而毫不衰减的通过圆周外的任何频率。
IHPF 具有振铃性质。振铃:微小物体和线条呈白色。
2、巴特沃斯高通滤波器(BHPF)
n 阶且截止频率距原点的距离为 D0 的巴特沃斯型高通滤波器(BHPF)的传递函数如下:
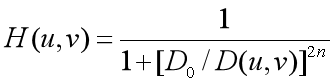
其中 D0 是指定的非负数值,D(u,v) = [(u - M/2)2 + (v - N/2)2]1/2
巴特沃斯型高通滤波器比理想高通滤波器更平滑,截至频值越高,越平滑。
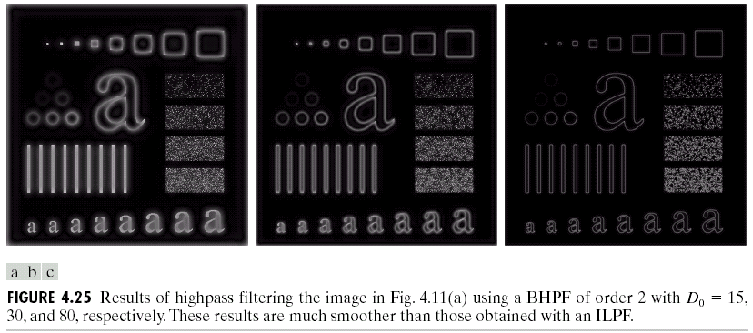
结果比 ILPF 平滑的多。
3、高斯高通滤波器(GHPF)
截止频率距原点的距离为 D0 的高斯高通滤波器(GHPF)的传递函数如下:

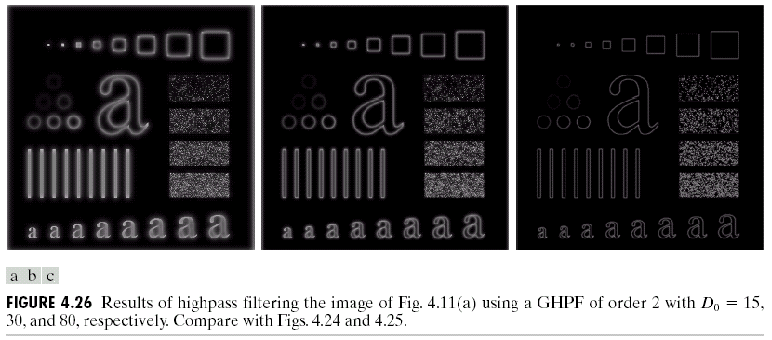
结果比前两个滤波器更平滑,即使对微小物体和线条也很清晰。
4.4.2 频率域的拉普拉斯算子
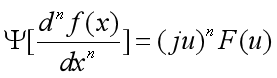
一维傅里叶变换后的拉普拉斯算子:
二维傅里叶变换后的拉普拉斯算子:
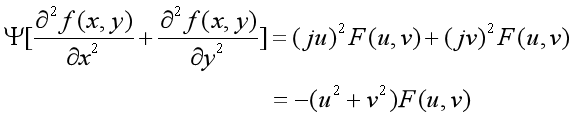
即:![]()
因此,频率域的拉普拉斯算子可以由如下滤波器实现:
![]()
由于 F(u,v) 的原点在进行变换前已由执行运算 f(x,y)(-1)x+y 中心化了,如果 f(和 F)是 MXN 大小,则将原点一点到频率矩形中的 (M/2,N/2),因此滤波函数中心也需要被平移为:
![]()
空间域拉普拉斯算子过滤后的图像可由计算 H(u,v)F(u,v) 的反傅里叶变换得到:
![]()
对空间域拉普拉斯算子的计算结果进行傅里叶变换,等价于 F(u,v) 与 H(u,v) 相乘。
![]()
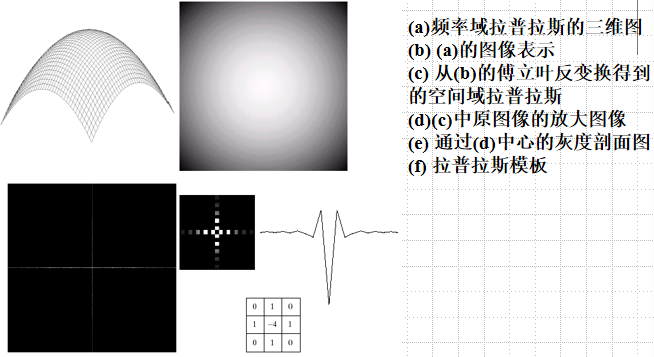
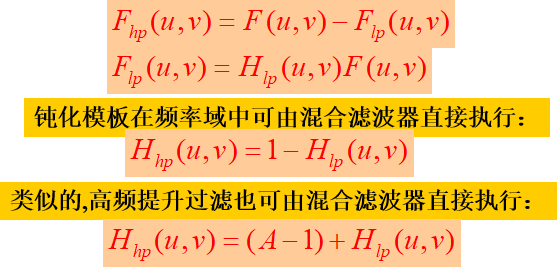
4.4.3 钝化膜板、高频提升滤波器和高频加强滤波
1、钝化模板
钝化模板简单地由从一幅图像减去自身模糊图像而生成的锐化图像构成。采用频域技术,这意味着从图像自身减去低通滤波后的图像而得到高通滤波的图像。
![]()
高频提升过滤通过将 f(x,y) 乘以一个大于 1 的常数 A 产生:
![]()
可改写成:

2、利用图像的高频成分强调增强的作用
在高通滤波器前简单地乘以一个常数,再增加一个偏移以便使零频率不被滤波器除掉。高频增强
![]()
a ≥ 0 且 b > a,a 的典型值在 0.25 到 0.5 之间,b 的典型值在 1.5 到 2.0 之间。当 a = (A-1) 且 b = 1 时高频加强转化为高频提升滤波。当 b > 1 时,高频得以加强。
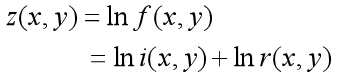
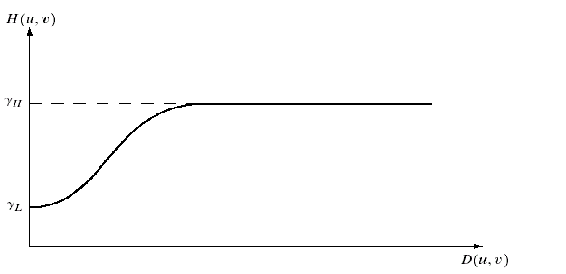
3、同态滤波器
照度—反射模型:
![]()
开发一种能同时进行灰度范围的压缩和对比度增强的频率处理。
不能直接对照度—反射的频率部分进行傅里叶变换,因为:
![]()
但是,如果定义:
那么


如果借助于一个滤波函数 H(u,v) 处理 Z(u,v),那么可得:

其中 S(u,v) 是结果的傅里叶变换。
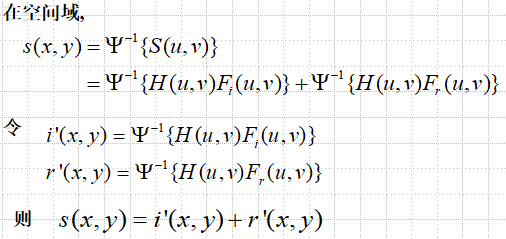
z(x,y) 由 f(x,y) 取对数得到,因此取指数操作就能得到增强图像 g(x,y)
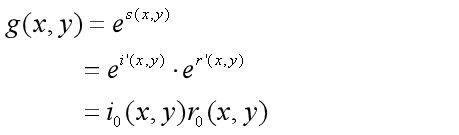

处理过程:

首先将照射分量和反射分量分开,然后同态滤波函数 H(u,v) 分别对两个分量进行操作。
同态滤波器 H(u,v) 以不同的方法影响傅里叶变换的高低频成分



 浙公网安备 33010602011771号
浙公网安备 33010602011771号