maxwell电机转矩扫描与使用MTPA策略绘制效率map图
1.电机转矩扫描
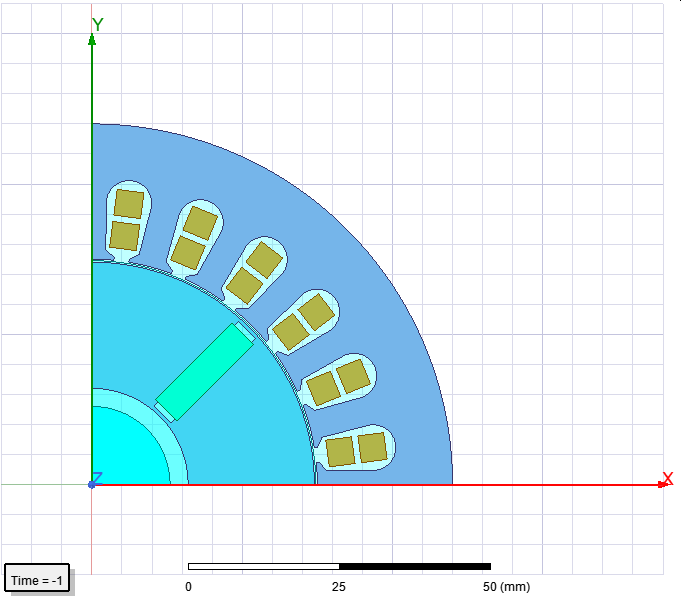
电机用的ipm_1
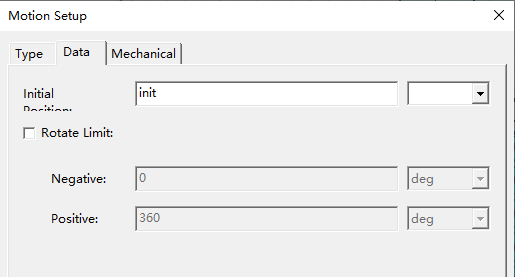
电流激励设置:
- A相:Im*sin(2*pi*fs*time+th)
- B相:Im*sin(2*pi*fs*time+th-2*pi/3)
- C相:Im*sin(2*pi*fs*time+th+2*pi/3)
初始机械角度:
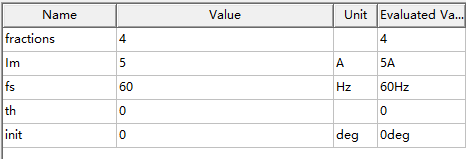
电机参数:(先保持init和th都为0)
A相轴线位置:
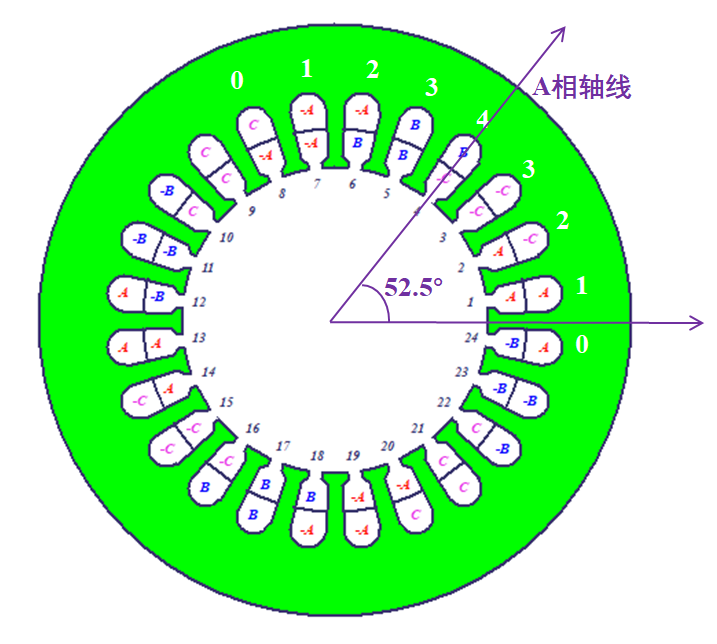
N极轴线:
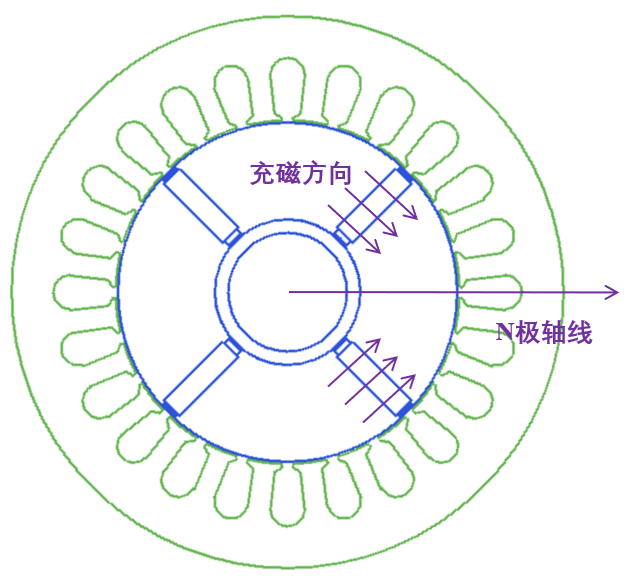
1.1初始机械角度
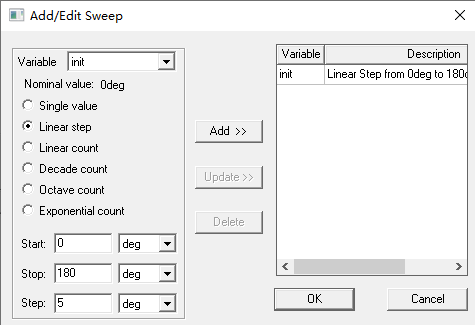
首先扫描init(原始设置是52.5deg),由于电机有两对极,所以扫描范围是0到180度,间隔5度。
观察转矩图:
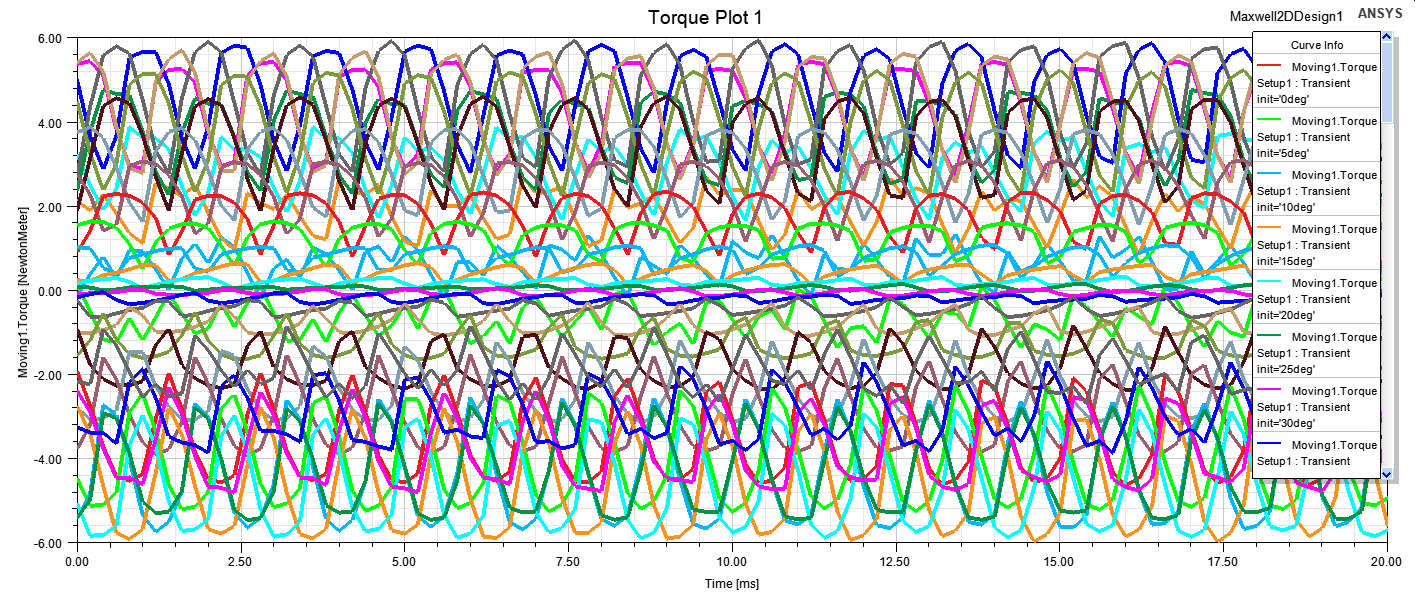
可以看到,不同init下转矩有明显变化。下面以init为横轴,平均转矩为纵轴,进行进一步观察。
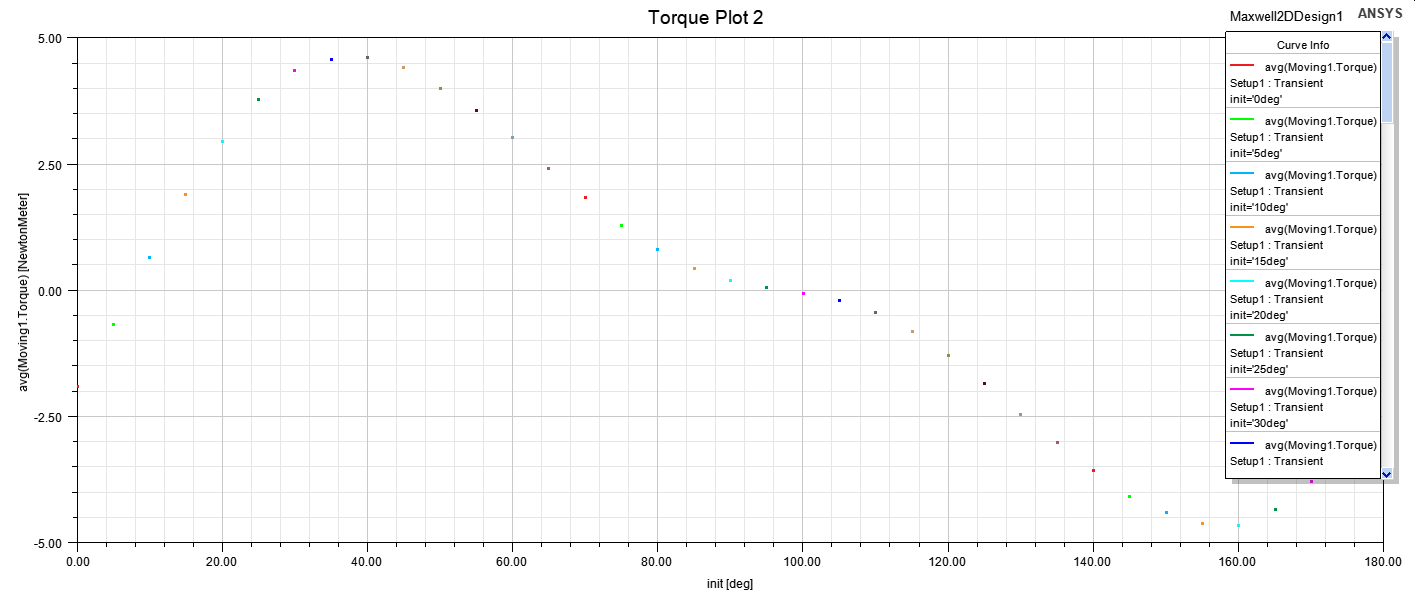
可以看到,在5~95deg区间内转矩为正,电机工作在电动状态,其他区间转矩为负,电机工作在发电状态。40deg时电机转矩达到最大值。
在35~45deg进行进一步扫描,如下图。
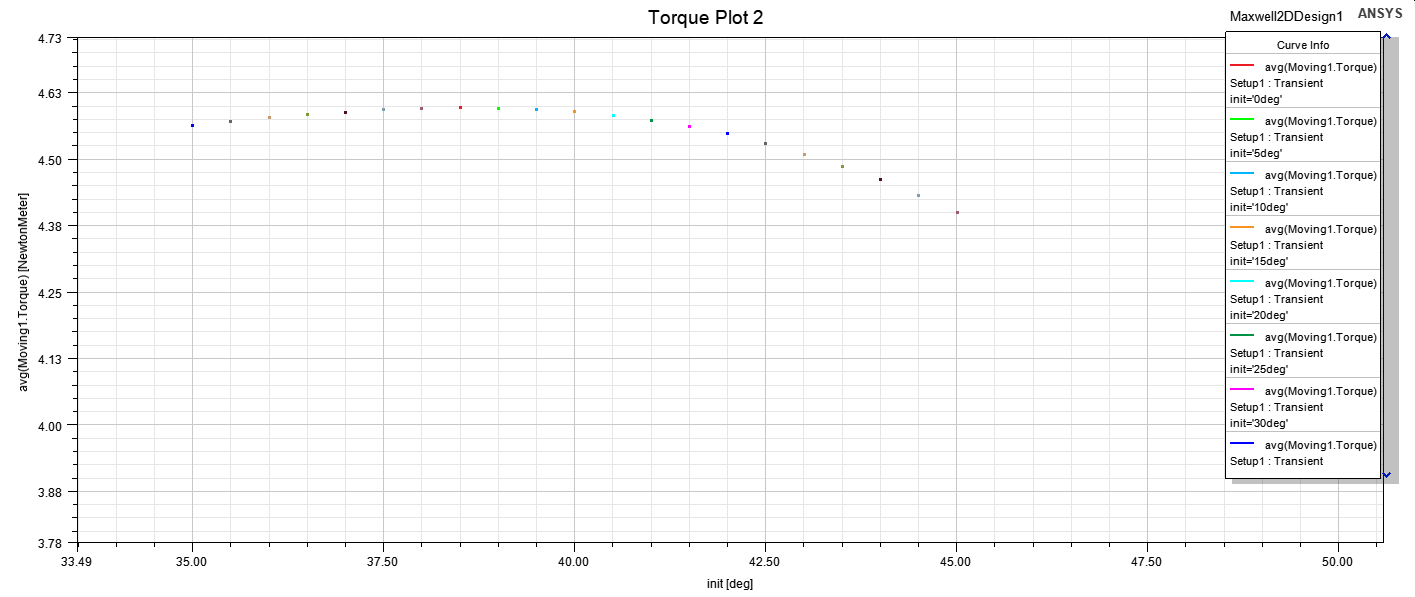
init为38.5deg时,转矩达到最大,为4.5956Nm。
1.2电流角
对th进行扫描。

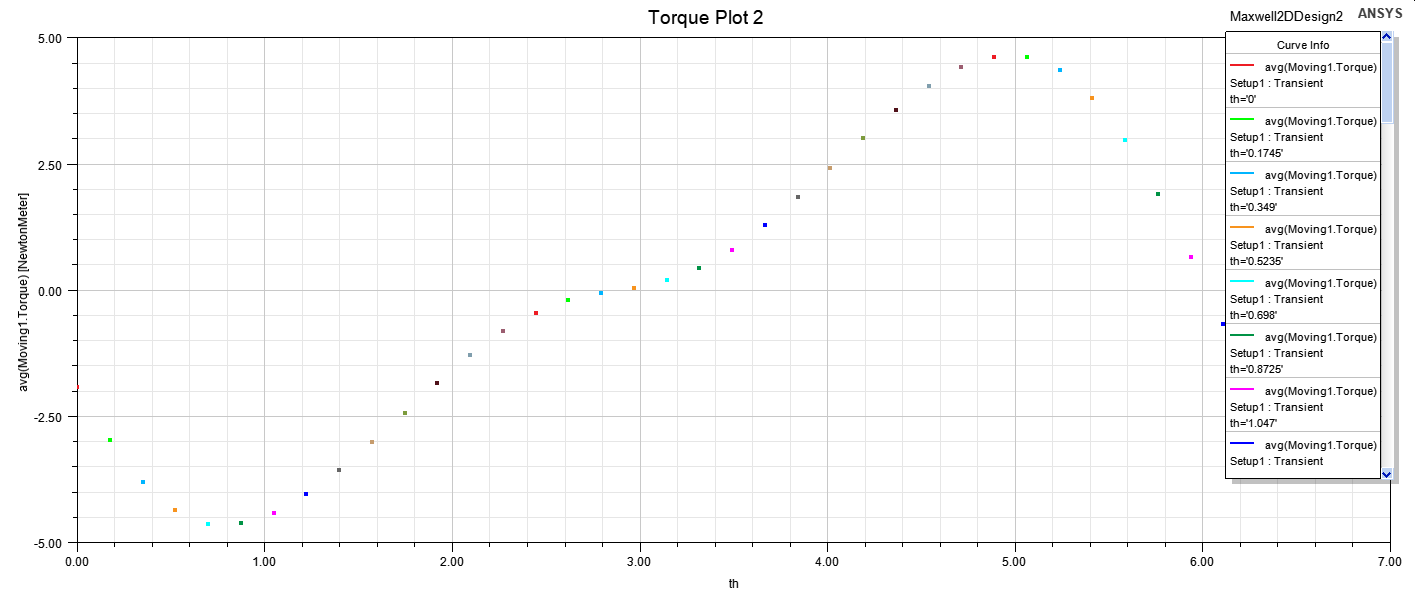
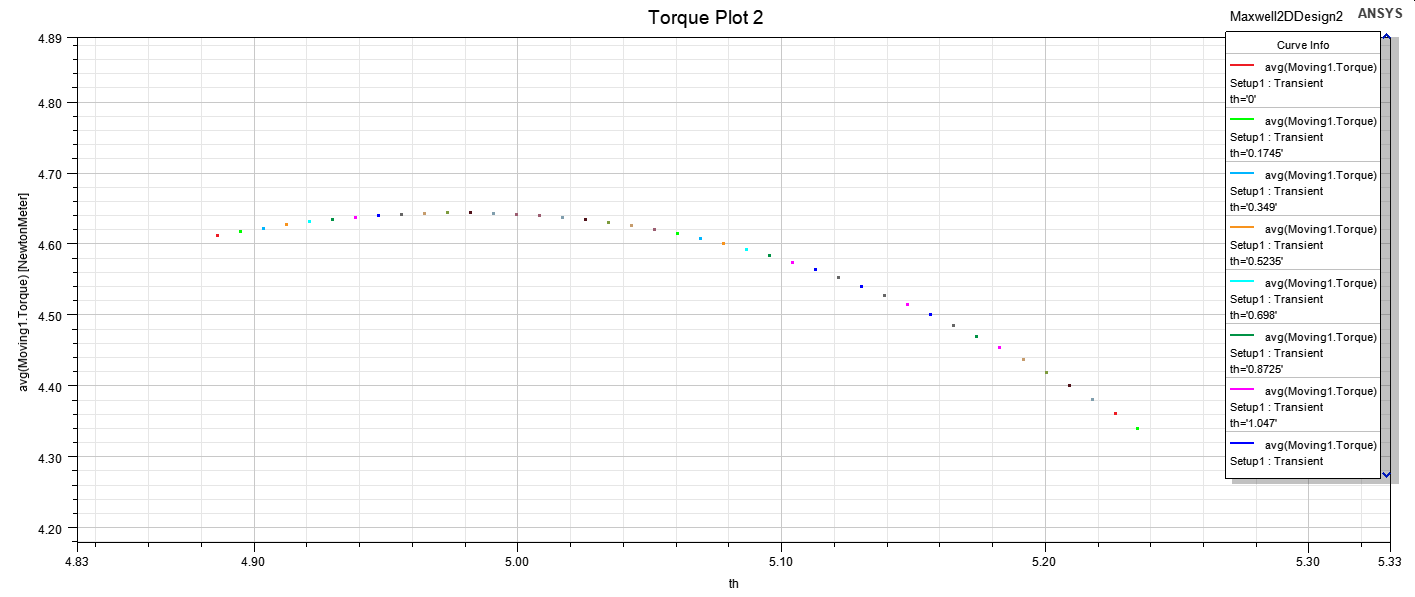
th为4.97327(285度)时转矩最大,最大值为4.643Nm。
1.3小结
可以看到,上面的两幅图有轴对称关系,即设置init和设置th是等价的,当th为285度时,即再经过75度电角度才到达零点,也可以说成让转子先转约38度机械角度。略小于52.5度,及定子磁场超前于转子磁场。
画出下图,能更好地说明这一问题。
data1<-read.csv("Torque Plot 1.csv")#init
data2<-read.csv("Torque Plot 2.csv")#th
plot(data1$init..deg.,data1$avg.Moving1.Torque...deg.,type="l",col="red")
par(new=TRUE)
plot((2*pi-data2$th...)/pi*90,data2$avg.Moving1.Torque....,type="l",col="blue")
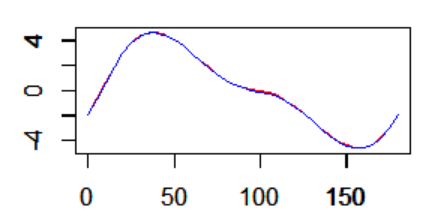
可以看到,二者几乎完全重合。
如果开启机械瞬态分析,则可以看到转速的波动,但此时没有添加外电路,所以不能设定控制策略。

2.MTPA
2.1dq变换
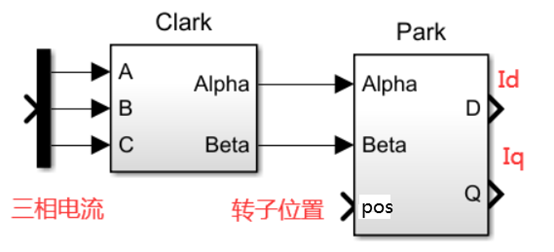
下面对不同的电流进行扫描,在此之前先回顾一下Clark和Park变换,即Id和Iq的计算。
之前在matlab中搭建的模型:
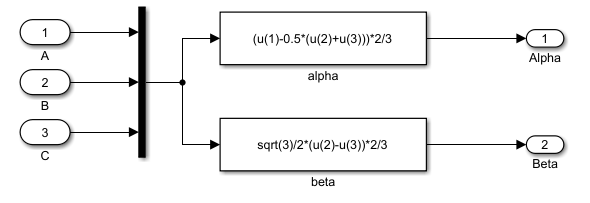

即
\[I_d=I_\alpha\cos(pos)+I_\beta\sin(pos)\\=\frac{2}{3}(I_a-0.5(I_b+I_c))\cos(pos)+\frac{2}{3}\frac{\sqrt3}{2}(I_b-I_c)\sin(pos)\\=\frac{2}{3}(I_a\cos(pos)+I_b\cos(pos-\frac{2\pi}{3})+I_c\cos(pos+\frac{2\pi}{3}))\]
同理
\[I_q=-I_\alpha\sin(pos)+I_\beta\cos(pos)\\=-\frac{2}{3}(I_a-0.5(I_b+I_c))\sin(pos)+\frac{2}{3}\frac{\sqrt3}{2}(I_b-I_c)\cos(pos)\\=-\frac{2}{3}(I_a\sin(pos)+I_b\sin(pos-\frac{2\pi}{3})+I_c\sin(pos+\frac{2\pi}{3}))\]
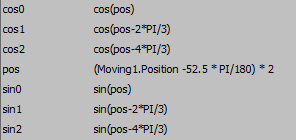
在maxwell的Output Variables中可以进行这样的设置:

2.2MTPA
保持init=52.5deg,即d轴和A相轴线对齐,扫描Im和th,其中th扫描范围0~2*pi,步长0.1745(10deg),Im扫描范围0~7.5A,步长0.5A。
得到下图:
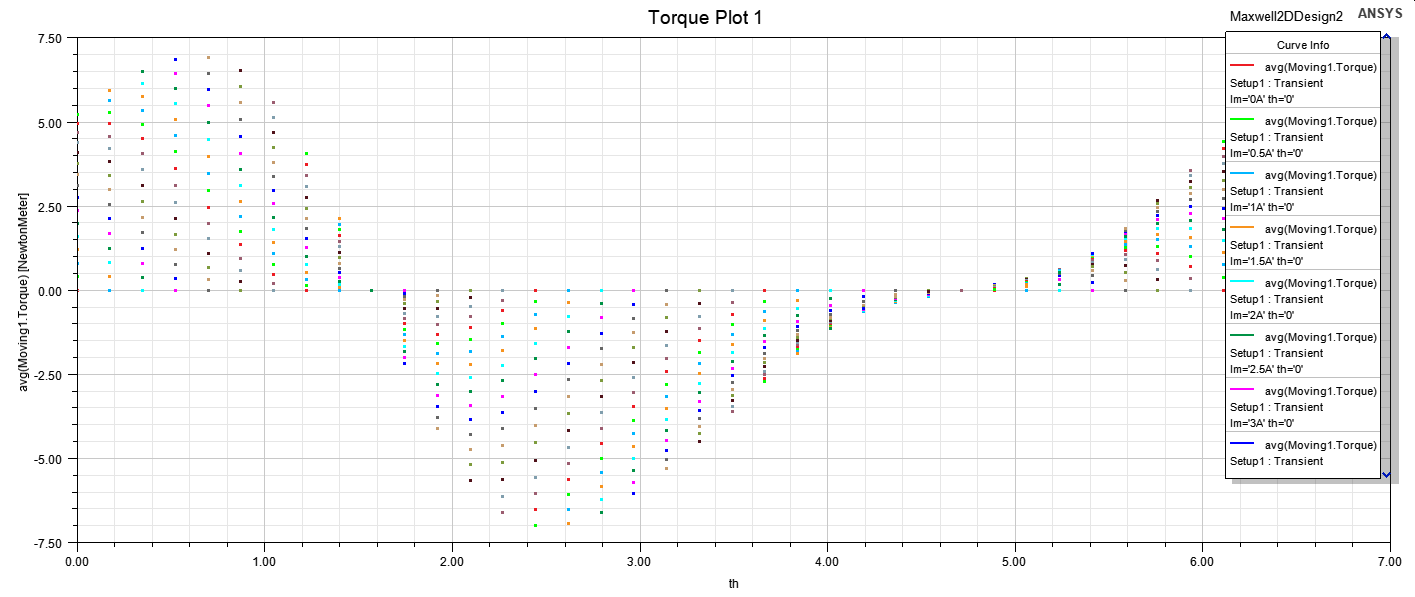
导出表格

得到下表:
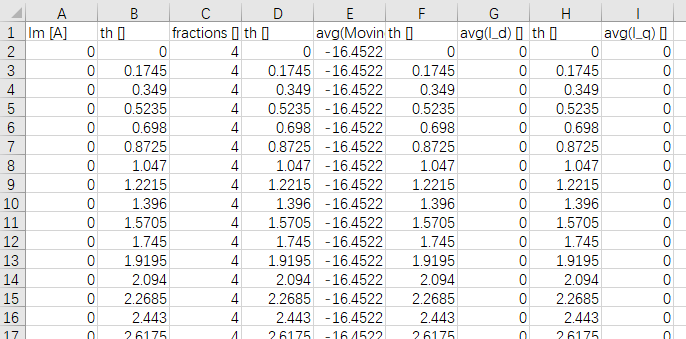
绘图观察一下:
data<-read.csv("Table 1.csv")
data<-data[,c(1,2,5,7,9)]
library(ggplot2)
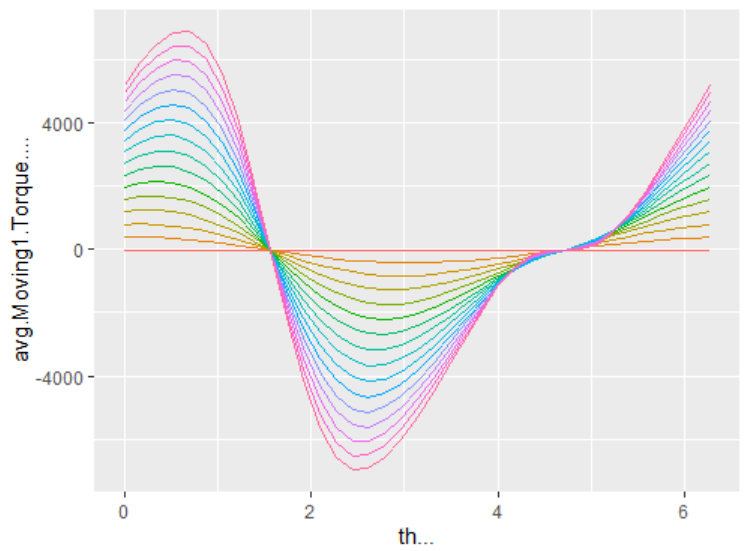
ggplot(data,aes(th...,avg.Moving1.Torque....,col=factor(Im..A.)))+geom_line()
ggplot(data,aes(th...,avg.Moving1.Torque....,col=factor(Im..A.)))+geom_line()+
xlim(0,1.7)+ylim(-1000,7000)
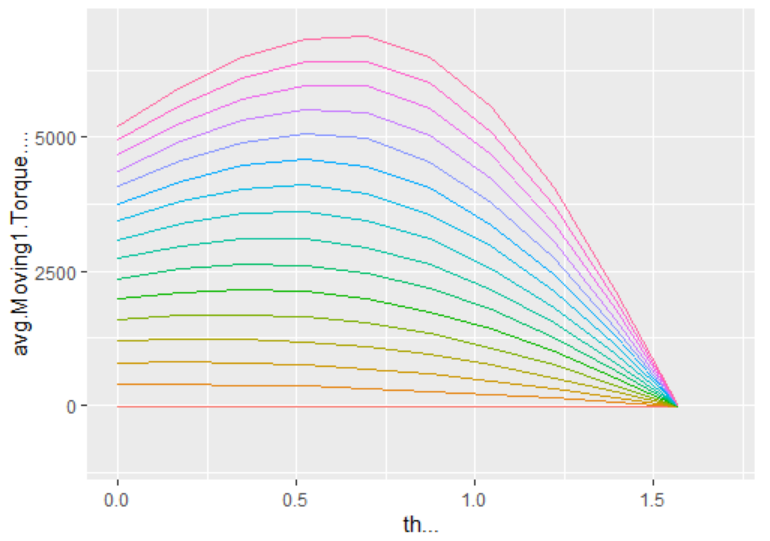
寻找每个电流下的最大转矩:
I<-unique(data$Im..A.)
n<-length(I)
temp<-rep(0,n)
table<-data.frame(Im=temp,th=temp,Tor=temp,Id=temp,Iq=temp)
for(i in 1:n){
dataI<-data[data$Im..A.==I[i],]
index<-which.max(dataI$avg.Moving1.Torque....)
table[i,]<-dataI[index,]
}
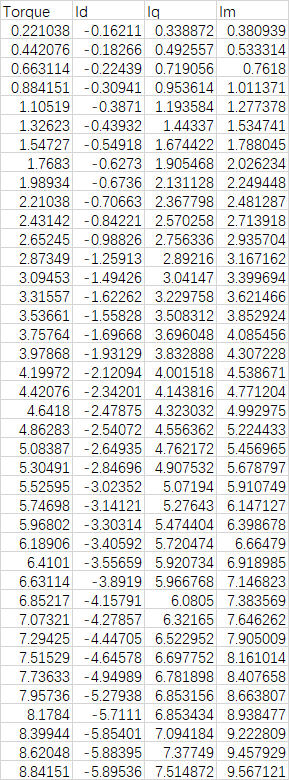
得到表格:
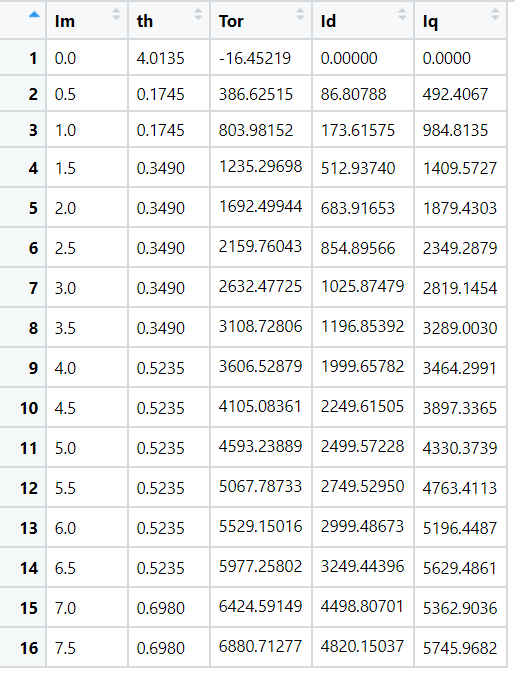
这就是这一转速下的转矩指令表。
2.3效率MAP
下面利用maxwell中的工具绘制效率map,与上面的扫描结果进行对比。
在View菜单栏中打开ACT Extensions工具。
选择Machine Toolkit进入。

选择待求解的工程,并进行相应设置。
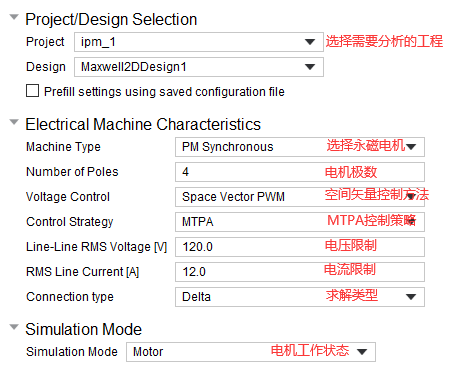
其中极数是为了确定电流频率和电机转速的关系。
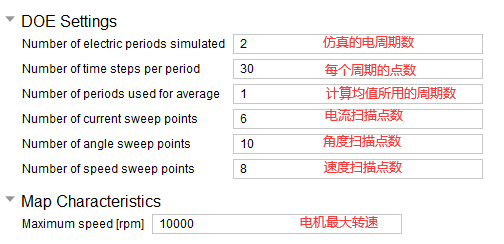
设置求解精度。
进一步设置:(一般保持默认即可)
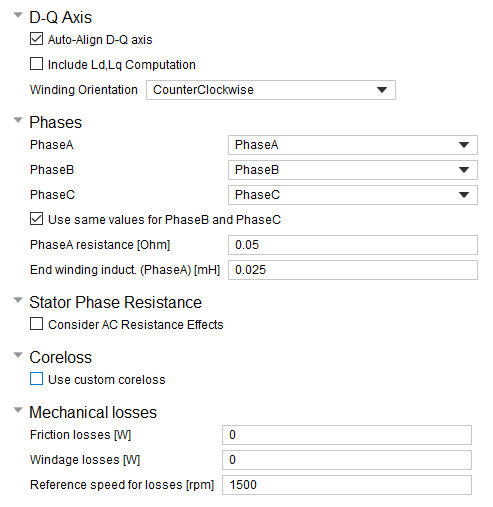
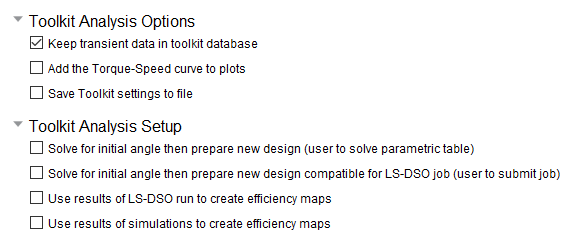
完成设置后点击Finish开始计算。
计算完成后得到下列图像。
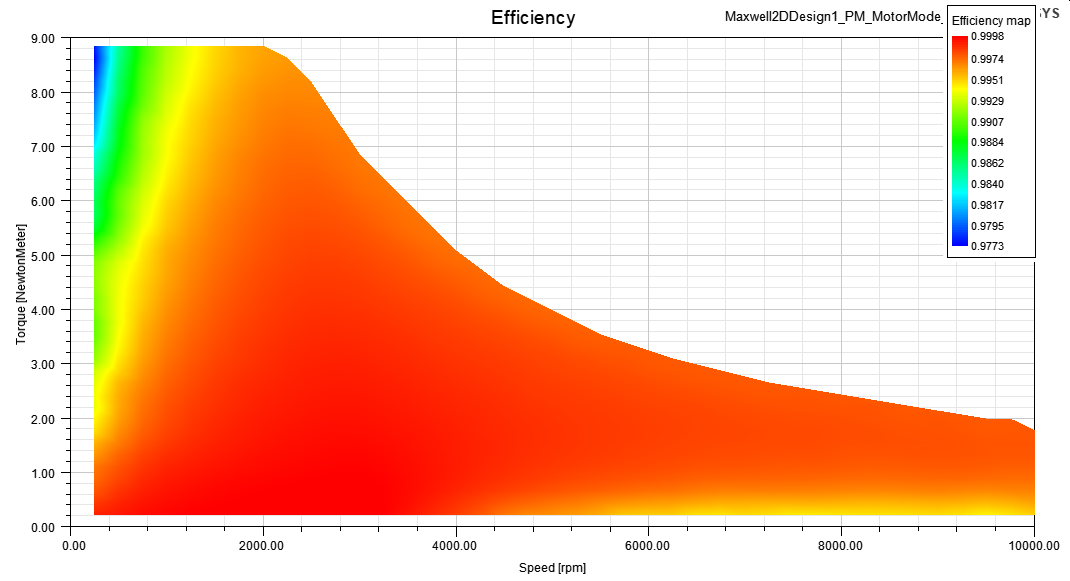
因为损耗中只考虑了StrandedLoss,所以效率很高。
ID:

IQ:
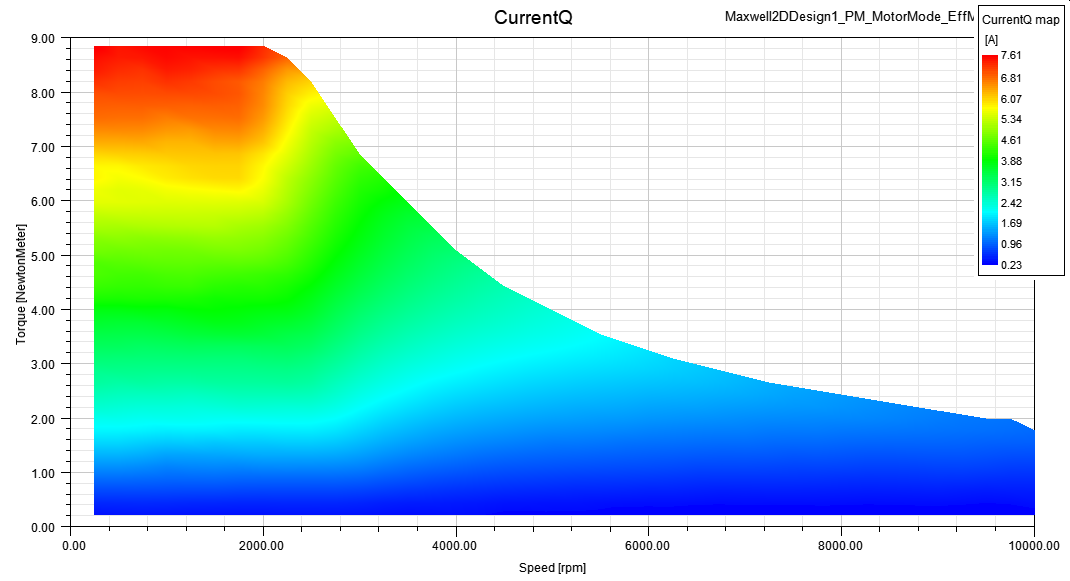
Im/1.414=Irms:

提取转速为1800rpm处的值:
并与扫描法得到的结果对比,如下图:
library(readxl)
table2<-read_xlsx("mtpa对比.xlsx")
layout(matrix(c(1,1,2,3), 2, 2, byrow = FALSE),
widths=c(1, 1), heights=c(1, 1))
plot(table$Tor,table$Im,type="l",col="red",xlim=c(0,7000),ylim=c(0,8),xlab="Torque/mNm",ylab="Im/A")
par(new=TRUE)
plot(1000*table2$Torque,table2$Im,type="l",col="blue",xlim=c(0,7000),ylim=c(0,8),xlab="",ylab="")
legend("topleft",legend=c("sweep","toolkit"),
col=c("red","blue"),lty=1,lwd=2)
plot(table$Tor,-table$Id,type="l",col="red",xlim=c(0,7000),ylim=c(-5000,0),xlab="Torque/mNm",ylab="Id/mA")
par(new=TRUE)
plot(1000*table2$Torque,1000*table2$Id,type="l",col="blue",xlim=c(0,7000),ylim=c(-5000,0),xlab="",ylab="")
legend("bottomleft",legend=c("sweep","toolkit"),
col=c("red","blue"),lty=1,lwd=2)
plot(table$Tor,table$Iq,type="l",col="red",xlim=c(0,7000),ylim=c(0,6000),xlab="Torque/mNm",ylab="Iq/mA")
par(new=TRUE)
plot(1000*table2$Torque,1000*table2$Iq,type="l",col="blue",xlim=c(0,7000),ylim=c(0,6000),xlab="",ylab="")
legend("topleft",legend=c("sweep","toolkit"),
col=c("red","blue"),lty=1,lwd=2)

可见二者非常接近,从方法上说是一致的。也就是说,使用扫描法多考虑几个转速取值,并兼顾电流和电压限制,同样可以手动绘出效率map图。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号