数字样机:惯性导航系统控制单元仿真
01.简介
惯性导航系统 (INS,Inertial Navigation System) 基于惯性原理建立,而惯性是物体自身的固有属性,因此其工作时既不依赖于外部信息,也不向外部辐射能量,优于卫星导航与无线电导航,是一种具备隐蔽性、自主性的导航系统,被广泛应用于航空航天、无人机、智能交通等各类领域中,是复杂电磁环境下自主建立空间基准的重要手段。以飞机举例,当下衡量某个型号的飞机是否先进,要看其是否装备惯性导航及装备了什么类型和性能的惯性导航。

▲惯导系统在各领域中的应用
惯性导航系统的基本工作原理是以物理力学定律为基础,通过测量载体在惯性参考系的加速度并自动进行积分运算,将其变换到导航坐标系中,得到在导航坐标系中的速度、偏航角和位置等信息,获得载体瞬时速度和瞬时位置数据的技术。
惯性测量单元 (IMU,Inertial measurement unit) 是惯性导航系统的核心,简称惯组,是一种用于测量物体运动状态的传感器设备,主要由加速度计和陀螺仪组成,通过测量物体的线性加速度和角速度,提供即时的运动信息以计算物体的当前姿态和运动状态。
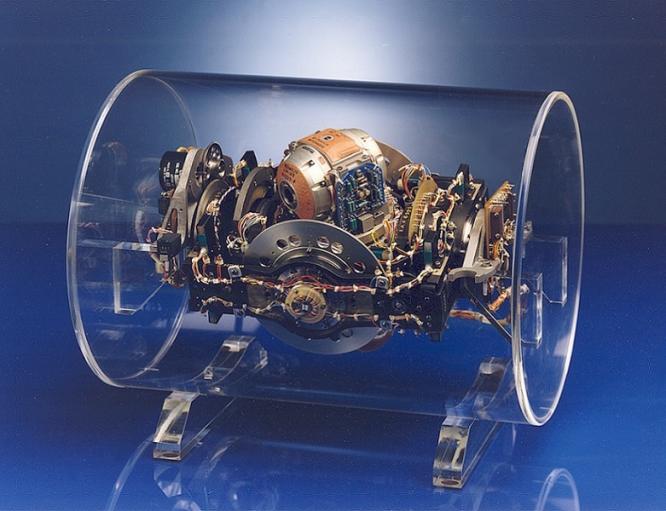
▲惯性导航系统实物概念图
02.困境与解决方案
高精度惯导设备中,大量的实时数据需要由惯性测量单元获取并解算,将得到的载体运动状态与导航路线进行匹配,控制相应机械结构机构做出调整动作。其高速的数据采集和计算对复杂的多模块控制系统有着极高要求,而如此高精度的设备造价自然不菲,相关测试验证则更加难以展开。
数字孪生及数字样机技术的普及与深入为高端复杂装备研发节省了大量硬件成本和维护费用。惯导设备的研发困境也可通过数字样机来解决:构建导航系统惯组数字样机,在高一致性仿真状态下模拟系统的运行,可以实现低成本快速进行惯组单元的测试工作。通过精确模拟惯组的运行环境和性能,惯组系统在实际运行中的各种动态行为和响应特性得以显现。这种高保真度的仿真为研发人员提供了一个理想的测试平台,使得可以在不依赖实物硬件的情况下,全面了解系统的工作原理和性能表现,便于研发人员进行各类测试和验证,大大降低了研发成本。
值得一提的是,数字样机带来的快速部署和灵活性使得测试过程更加高效,可以在短时间内完成多种测试任务,提高了研发效率。研发人员可以轻松进行参数调整、算法优化和故障诊断,及时发现和解决潜在问题,从而不断改进系统的性能和可靠性。
03.应用案例
天目全数字实时仿真软件SkyEye,是一款国产自主可控的基于可视化建模的硬件行为级仿真平台,具备惯性导航系统的仿真验证能力。
基于SkyEye搭建的惯组数字样机由中央控制系统电路和其他设备机构组成。通过SkyEye搭建实现控制单元的DSP控制板,可用于运行电机、惯组控制逻辑程序,包括内外环电机控制的内部DSP芯片、FPGA单元、SDRAM、FLASH和通信总线模型。搭建完成的模型可配合上位机调试,与其他多学科建模仿真平台搭建的机构模型通过FMU标准接口进行集成联调,实现协同仿真,能够做到指标与实物惯组完全一致。
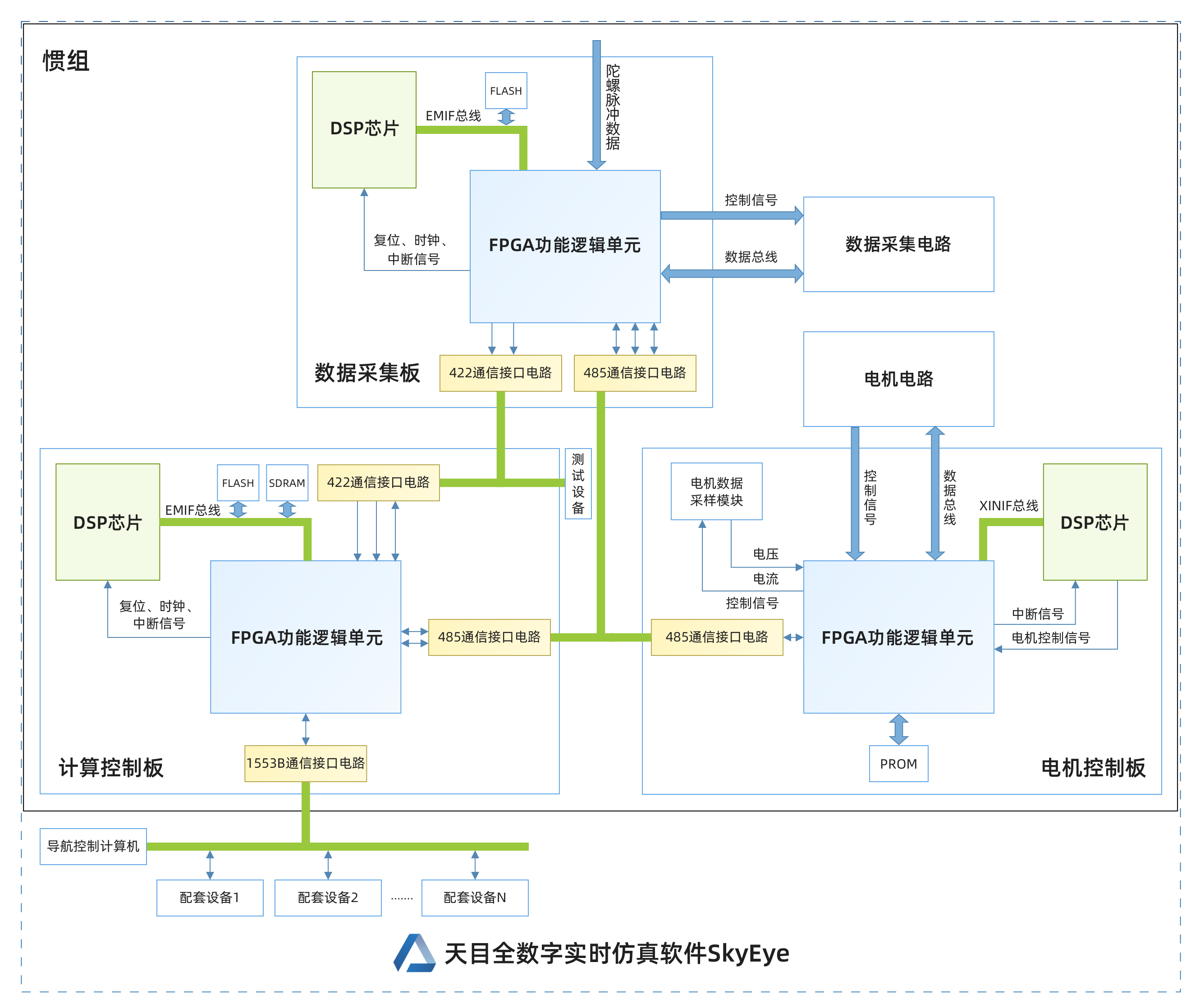
▲惯性导航系统数字样机仿真结构
具体搭建过程如下:
①基于DSP2xxx 芯片搭建电机控制板卡,运行电机控制逻辑程序。
电机控制板的主控架构为DSP+FPGA协同控制,DSP芯片与FPGA通过XINTF总线实现数据交互,DSP芯片外围配置必要的外设模型及数据处理传输的接口模型,受外环DSP控制并与电机组件相连实现闭环控制。
② 基于DSP6xxx芯片搭建惯组数据采集与计算控制板,运行惯导控制逻辑程序。
数据采集与计算控制板DSP芯片的数字模型是数字惯组的重要组成部分,具有一致性反映实体惯组中DSP芯片在真实环境中的功能、性能以及被测试的能力,其建模颗粒度直接关乎数字惯组的功能、性能及其仿真数据的可靠性。外围通信接口模型可与上位机或其他模型连接用以拓扑调试。
③ 搭建3块惯导控制子系统板卡,构建使用422/485/1553B总线模型进行数据交互和通信控制,测试验证惯导系统功能。
构建惯性导航系统数字样机,不仅实现了低成本快速测试控制单元的目标,还为研发人员提供了强大的工具支持,显著提升了导航系统的开发和优化效率。通过这种方式,研发团队可以更快地推进项目进展,并确保最终产品的高质量和高可靠性。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号