
通信系统仿真:飞行器集群协同控制纽带
航天技术发展至今,飞行器在启动、动力、控制等多个领域遇到技术瓶颈,已无法单靠个体能力的提升来提高整体效果,又面临着复杂环境、动态需求、不确定策略等多重挑战,因此飞行器集群作为颠覆性样式成为近十年中的研究热点。
飞行器集群具有高韧性、低成本、组织灵活的优点,通过协同控制技术支撑飞行器体系化、智能化发展,在协同探测和打扰等多种任务中呈现出“1+1>2”的整体效果。但是受到技术条件等多种原因限制,目前飞行器集群的协同控制还面临着下列难点:
1. 由于受到状态不确定性和时间约束性的影响,协同控制需要在强耦合约束条件下结合时域、频域、能力域、信息域等多领域分布式平台的探测资源,并将其成都融合才能实现复杂多变的状态下对目标的可靠检测、准确识别与稳定跟踪。
2. 飞行机集群需要在大动态、低信噪比的条件下通过协同感知复杂电磁环境,自主生成、优化策略,并实现飞行器内与飞行器之间可靠、实时、安全、精准的信息传输与共享。
为了应对复杂多变的环境,飞行器集群系统的研制和运用也需要采取对应的措施和手段。与传统飞行器研制相比,飞行器集群的能力重心由单纯的物理域拓展至信息域、认知域,因此飞行器集群的控制系统主要涉及单体运动层、多体协同层和任务决策层。
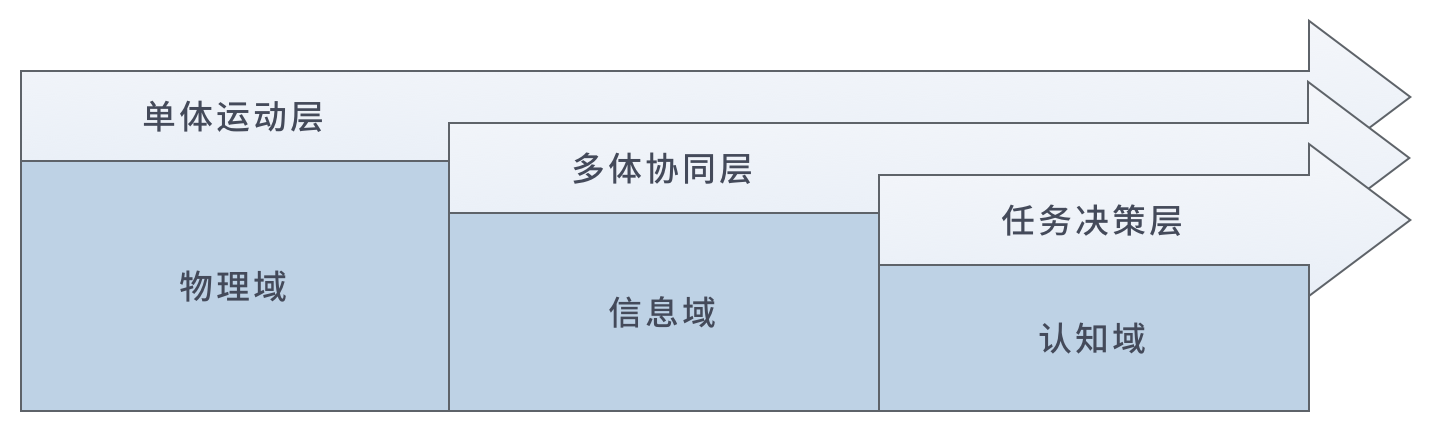
▲飞行器集群控制系统架构图
多飞行器协同控制系统中,各分系统如何工作并实现协同,是多飞行器协同控制在设计时需要考虑的核心问题。每个层面之间的组网通信是飞行器协同作战的保障。多飞行器可通过信息网络传递和交换目标信息、环境信息和协同信息,还可以接入指控中心,需要具备响应速度快、抗干扰能力强等能力,以实现集群的统一指控和信息回传,并且随着态势信息的变化根据决策结果进行各飞行器的实时调节。
由于飞行器的协同控制属于嵌入式应用需求且硬件资源有限,应用传统的开发方式已无法满足飞行器通信开发的需求。为了解决这一问题带来的损失,应使用仿真平台来进行飞行器通讯系统的搭建与检测,以建立完善的协同效能评估系统。
天目全数字实时仿真软件SkyEye,是一款国产自主可控的基于可视化建模的硬件行为级仿真平台,具备多飞行器协同效能评估的仿真验证能力。SkyEye针对飞行器通信软件的开发与测试提供了数据传输的监视功能,可以直观地展示出通信节点之间的通信过程,并获取每个通信阶段的硬件信息,如处理器寄存器、内存、设备寄存器等,大幅提升了测试效率。SkyEye还支持多CPU的异构仿真,整个系统由ARM+DSP+FPGA协同完成。
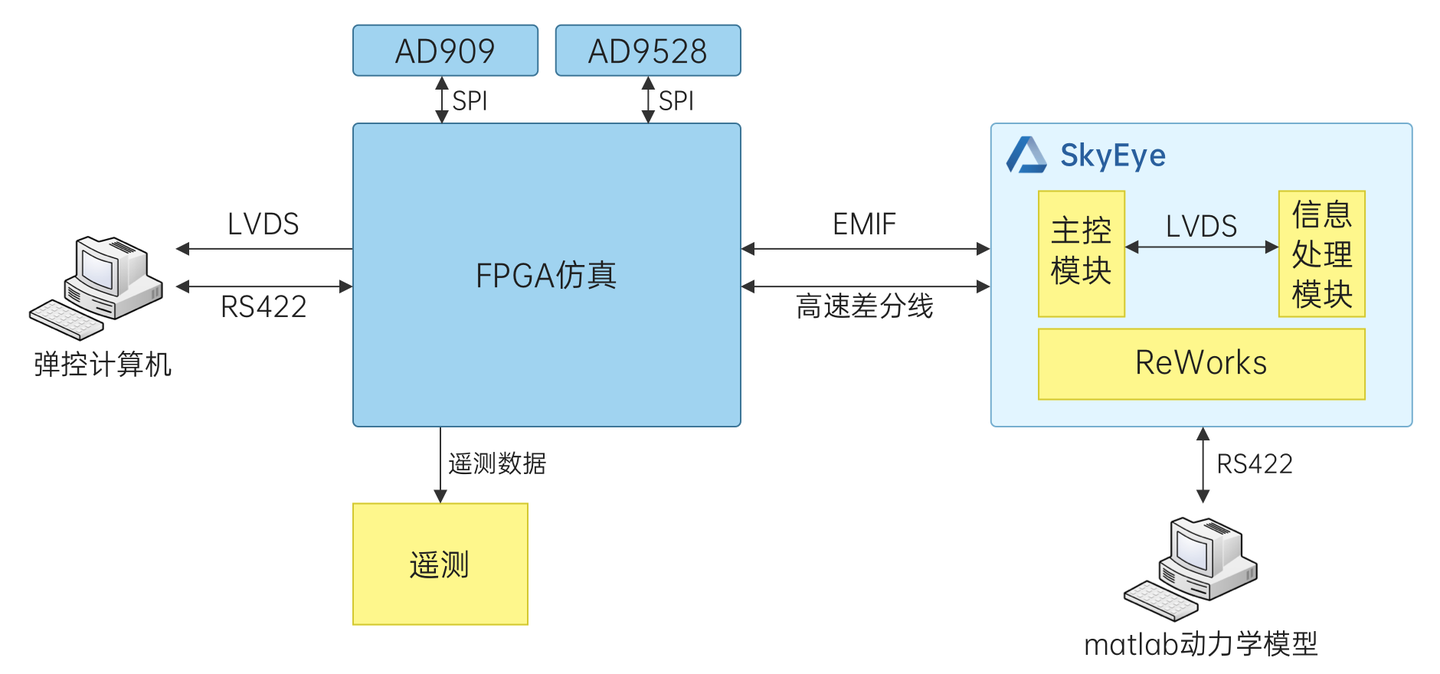
▲SkyEye飞行器通信系统仿真案例

 浙公网安备 33010602011771号
浙公网安备 33010602011771号