关于无线传感网络节点定位的分析报告
从移动互联到物联网,位置是一个基础的不可或缺的信息,但是从精细化的行业应用需求来说,只有更高精度的定位信息才能带来更高的价值,人们可以更加精确地知道事物所处的位置,知道人员具体位置在哪儿,更好的管理企业、人员或物资。比如说保障隧道施工人员人身安全,协助监狱搭建全局化、可视化的监管平台;提高石油化工行业安全保障效率;助力建筑工地智慧管理升级等等。而以上行业在定位方案的超高定位精度、大容量、低延迟、高刷新率这几个指标上都具有很高的要求,因此节点定位技术在无线传感网络当中具有不可或缺的地位。
1.传感器节点定位的基本概念和评价指标
1.1. 传感器节点定位的基本概念
WSN的定位问题一般指对于一组未知位置坐标的网络节点,依靠有限的位置已知的锚节点,通过测量未知节点至其余节点的距离或跳数,或者通过估计节点可能处于的区域范围,结合节点间交换的信息和锚节点的已知位置,来确定每个节点的位置。
在WSN节点定位技术中,根据节点是否已知自身的位置,把传感器节点分为信标节点或锚点和未知节点。
1.2. WSN定位算法的特点
在传感器网络中,传感器节点能量有限、可靠性差、节点数量规模大且随机布放、无线模块的通信距离有限,对定位算法和定位技术提出了很高的要求。传感器网络的定位算法通常要求具备以下特点:
(1)自组织性:传感器网络的节点随机分布,不能依靠全局的基础设施协助定位。
(2)健壮性: 传感器节点的硬件配置低、能量少、可靠性差、测量距离时会产生误差,算法必须具有良好的容错性。
(3)能量高效: 尽可能地减少算法中计算的复杂性,减少节点间的通信开销,以尽量延长网络的生存周期。通信开销是传感器网络的主要能量开销。
(4)分布式计算:每个节点尽量计算自身位置,不能将所有信息传送到某个节点进行集中计算。
1.3. 传感器节点定位的评价指标
无线传感器网络定位算法的性能直接影响其可用性,其中常用的评价指标有:定位精度、规模、锚节点密度、节点密度、容错性和自适应性、功耗、代价。
上述7个性能指标不仅是评价WSN自身定位系统和算法的标准,也是其设计和实现的优化目标。为了实现这些目标的优化,有大量的研究工作需要完成。同时,这些性能指标是相互关联的,必须根据应用的具体需求做出权衡,以选择和设计合适的定位技术。
2.传感器节点定位算法的分类
2.1..基于测距的定位和无需测距的定位
根据定位算法是否需要通过物理测量来获得节点之间的距离(角度)信息,可以把定位算法分为基于测距的定位算法和无需测距的定位算法两类。前者是利用测量得到的距离或角度信息来进行位置计算,而后者一般是利用节点的连通性和多跳路由信息交换等方法来估计节点间的距离或角度,并完成位量估计。基于测距的定位算法总体上能取得较好的定位精度,但在硬件成本和功耗上受到一些限制。基于测距的定位机制使用各种算法来减小测距误差对定位的影响,包括多次测量、循环定位求精,这些都要产生大量计算和通信开销。所以基于测距的定位机制虽然在定位精度上有可取之处,但并不适用于低功耗、低成本的应用领域。
室内定位系统Cricket AHLos 算法、基于AOA的APS算法、RADAR算法、LCB算法(Localizable Collaborative Body)和DPE ( Directed Position Estimation )算法等都是基于测距的定位算法;而质心算法(Centroid Algorithm) 、DV-Hop ( Distance Vector-Hop) 算法、移动导标节点(Mobile Anchor Points,MAP) 定位算法、HiRLoc算法、 凸规划(Convex Optimization) 算法和MDS-MAP算法等就是典型非基于测距的定位算法。
2.2.绝对定位与相对定位
绝对定位的定位结果是一个标准的坐标位置,如经纬度;而相对定位通常是以网络中部分节点为参考,建立整个网络的相对坐标系统。绝对定位可为网络提供唯一的命名空间,受网络变动影响较小,有非常广泛的应用领域。大多数定位系统都可以实现绝对定位,只有部分定位系统和算法能实现相对定位。
2.3集中式计算、分布式计算与递增式计算
集中式计算是指把所需要的定位信息集中传送到某个中心节点(如汇聚节点),由该节点进行集中计算未知节点的位置。分布式计算是指由节点间进行信息交换,未知节点根据自身获取足够的信息进行自身位置计算的计算方式。集中式计算的优点是可以从全局角度出发更好地进行规划,从而获得相对精确的定位。
缺点是中心节点以及它周围的节点通信开销过大、能耗过快,易造成个别节点过早死亡。分布式计算可使网络中所有节点同时进行位置计算。递增式计算通常是从信标节点开始,信标节点周围的节点首先开始定位,依次向外延伸,逐步实现整个网络的定位。递增式算法的缺点是在定位过程中误差容易被积累和放大。
3.近年其他学者在WSN节点定位上的研究
3.1.基于深度学习的无线传感器网络安全定位算法。[]
该方法通过无监督学习自动学习信标节点的特征,然后结合bp神经网络识别三种攻击。
传统算法的主要缺陷是严重依赖于未知节点周围相邻节点的分布密度和规律。当网络中节点密度较低或相邻节点分布不均匀时,算法的性能将受到严重影响。而该学者的新方法是引入一种独立于相邻节点的APIT内点测试方法。未知节点只能通过与锚节点交换信息来确定它们是否位锚节点形成的三角形中。
如图所示,独立于相邻节点的三角形内点测试法的主要原理如下:
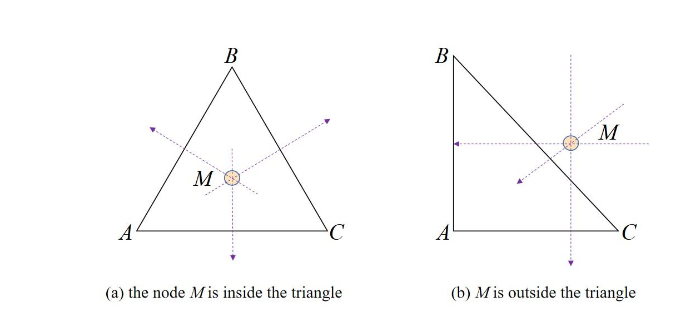
如图(a) 所示,当未知节点M在垂直于由锚节点组成的三角形的三个边的三个方向上移动时,如果没有一个未知节点同时靠近或远离三个锚节点,则未知节点位于三角形内部。
如图(b) 所示,如果未知节点沿其中一个向(垂直于BC侧的方向)移动,它将远离或靠近锚节点,未知节点位于三角形外部。
由于未知节点自身的坐标信息不确定,因此无法确定与三角形三条边垂直的方向。为实现上述思想,根据锚节点的坐标信息,未知节点随机分布n个虚拟节点:

由于这n个虚拟节点的坐标信息已知,未知节点M可以计算每个虚拟节点与锚节点之间的距离,然后估计每个虚拟节点上接收到的每个锚节点信号的RSSI,因此,当它移动到虚拟节点位置时,它可以确定自身与三个锚节点之间的距离关系发生变化,从而确定它是否位于由锚节点组成的三角形中。
最终实验结果也表明,随着对信标节点的干扰攻击次数的增加,攻击识别方法排除的被攻击信标节点和未排除的被攻击信标节点的定位误差都会增加。如果不排除恶意节点,定位错误会迅速增加,因为恶意信标节点参与定位,且RSSI值欺骗了普通节点,导致普通节点的位置相差悬殊。排除恶意信标,使公共节点能够准确区分信标节点提供的信息是否可靠,最终定位误差相对较小。
3.2.无线传感器网络和物联网中鲁棒性增强的传感器辅助蒙特卡罗定位(RESA-MCL)[]
蒙特卡罗定位算法简单,不需要对未知节点进行主动测量,部署成本低且易于实现,早在2004年Hu和Evans就将其应用于移动无线传感器网络的定位中。
而鲁棒性增强的传感器辅助蒙特卡罗定位(RESA-MCL) ,与以前的定位方案相比,该定位方案不仅实现了更高的定位精度,而且还提高了定位方案对恶意锚节点广播的错误信息的鲁棒性。为了实现这一点,RESA-MCL不断采用航位推算,而不是像原始SA-MCL方案那样仅在超出锚定范围时使用。RESA-MCL通过基于运动的合理性检查检测恶意锚节点,并通过一种新的粒子子集技术限制恶意节点对位置估计的影响。
RESA-MCL算法无论在安全情况下还是在受到恶意锚节点攻击的情况下,它的性能都强于同类方法。在没有攻击的情况下,它的性能优于最近的类似方法,在类似锚密度的情况下,定位误差降低了48%。RESA-MCL采用了三种技术来提高一般定位精度和对恶意锚节点的鲁棒性。在锚节点数较少的稀疏网络和锚节点数较多的密集网络中,定位精度都得到了提高。而在三种攻击模型下,并是在最有效的“固定位置"攻击模型下,即使有30%的恶意锚节点,定位错误也只会略有增加。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号