

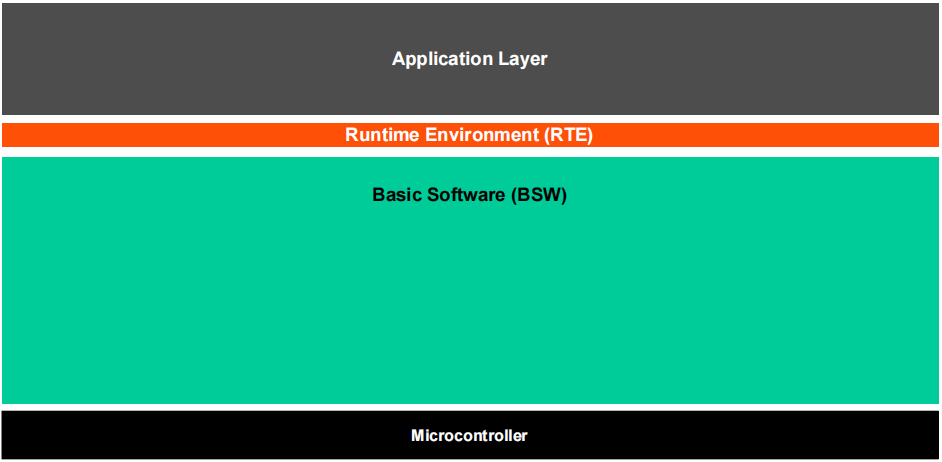
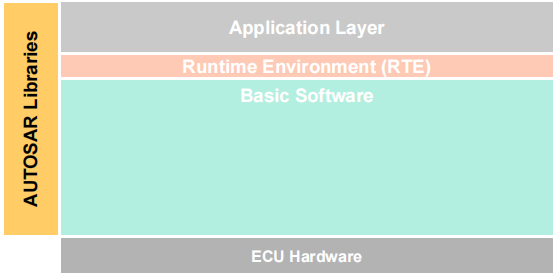
Top view
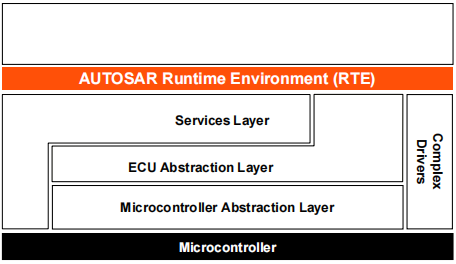
在最高的抽象级别上,AUTOSAR分为三个软件层(从上到下):应用层(Application Layer)、运行时环境(Runtime Environment(RTE))、基础软件层(Basic Software(BSW))。在BSW之下,是微控制器(Microcontroller/MCU),不属于AUTOSAR Architecture。
BSW
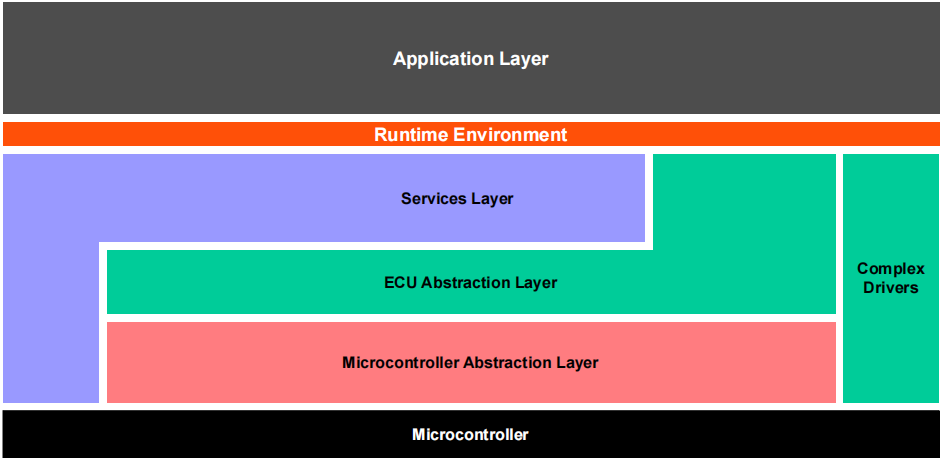
Coarse view of BSW
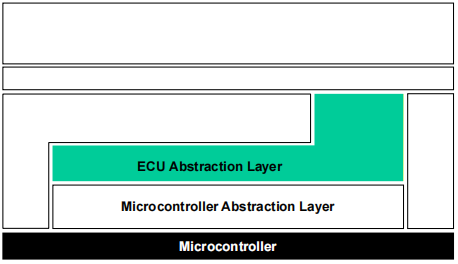
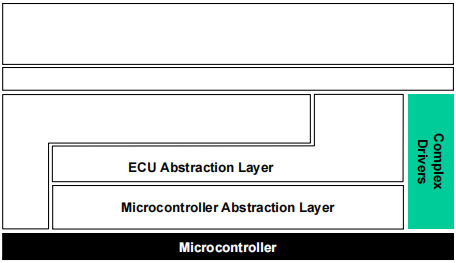
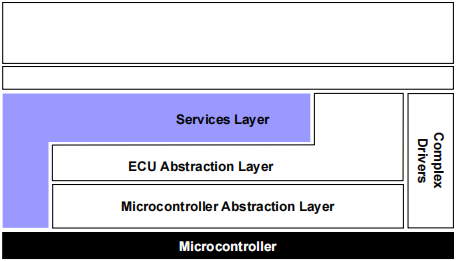
对于BSW,可以分成四层/部分:服务层(Services Layer)、ECU抽象层(ECU Abstraction Layer)、微控制器抽象层(Microcontroller Abstraction Layer(MCAL))、复杂驱动层(Complex Drivers)。
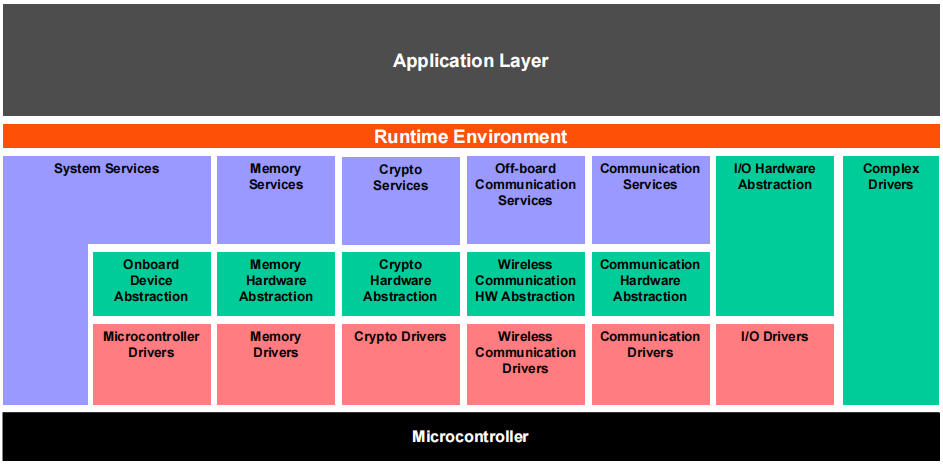
Detailed view of BSW
更详细地,BSW的四个层次可以继续细分。
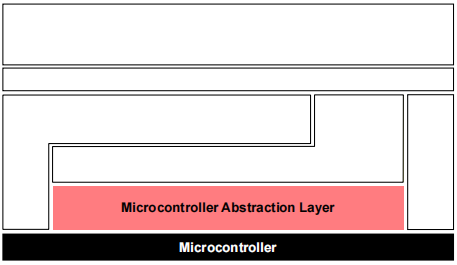
Microcontroler Abstraction Layer(MCAL)
MCAL是BSW的最底层。MCAL主要包含内部驱动,这些驱动是可以直接访问MCU和MCU内部外设的软件模块或驱动。
主要作用:向上层软件层提供标准化接口,使上层软件层独立于MCU。
实现依赖:具体的MCU。
MCAL中的内部驱动:微控制器驱动(Microcontroler Drivers)、内存驱动(Memory Drivers)、加密驱动(Crypto drivers)、无线通信驱动(Wireless Communication Drivers)、通信驱动(Communication Drivers)、I/O驱动(I/O Drivers)。(见“Detailed view of BSW”章节)
ECU Abstraction Layer
相对于MCAL,ECU抽象层包含了外部(MCU之外)设备驱动,并于MCAL对接,从而向上层提供进一步的抽象:对ECU的抽象。ECU抽象层向上层提供一组API访问来外设和设备。上层访问外设和设备时,不必关心这些外设和设备是位于MCU内还是之外,也不必关心它们与MCU的连接方式(port pins, type of interface)。PS. 外部驱动通过MCAL层的驱动(Internal Driver)访问外部设备。
主要作用:使上层独立于ECU硬件(含MCU)。
实现依赖:MCAL、ECU Hardware。
ECU 抽象层提供的抽象类型:板上设备抽象(Onboard Device Abstraction)、内存硬件抽象(Memory Hardware Abstraction)、加密硬件抽象(Crypto Hardware Abstraction)、无线通信硬件抽象(Wireless Communication HW Abstraction)、通信硬件抽象(Communication Hardware Abstraction)、I/O硬件抽象(I/O Hardware Abstraction)。(见“Detailed view of BSW”章节)
Complex Drivers
复杂驱动横跨硬件到RTE层。
主要作用:为特殊目的的功能提供集成进AUTOSAR的可能性,比如设备驱动:这些驱动未在AUTOSAR中进行规范说明、具有非常高的时间约束条件、或者用于迁移目的等待。
实现依赖:Complex Drivers可能实现为应用软件,依赖于MCU和ECU硬件。
Services Layer
服务层是BSW的最高层,且与应用软件有联系:当应用软件访问被ECU抽象层覆盖/抽象的I/O信号等时,服务层向应用软件提供相应接口。
主要作用:为应用软件、RTE、BSW提供基础服务。
实现依赖:Services Layer的实现不依赖于MCU和ECU硬件,也使得上层独立于MCU和ECU硬件。
服务类型:(见“Detailed view of BSW”章节)
- Input/Output(I/O):标准化访问sensors、actuators和ECU板上外设;
- Memory:标准化访问内部或外部存储器(非易失性存储器);
- Crypto:标准化访问密码原语,包括内部或外部硬件加速器;
- Communication:标准化访问:车载网络系统、ECU板上通信系统、ECU内部软件;
- Off-board Communication:标准化访问:车辆到X的通信、车内无线网络系统、ECU非车载通信系统;
- System:提供可标准化的(操作系统、定时器、错误存储)和特定的ECU(ECU状态管理、看门狗管理)服务和库功能。
RTE
运行时环境为应用软件(AUTOSAR Software Components and/or AUTOSAR Sensor/Actuator components. I.e. SWC)提供通信服务。在RTE之上,软件的架构风格从“分层”转变为“组件风格”。AUTOSAR软件组件(在同一ECU上或不同ECU之间的软件组件)通过RTE进行相互通信。
主要作用:使上层(AUTOSAR软件组件,即SWC)完全独立于ECU,即不依赖于ECU。无论它们是映射到同一还是不同ECU上,SWC之间都可以通过RTE的相关接口进行通信。
实现依赖:RTE的实现依赖于ECU和应用软件,即每个ECU独立生成自己的RTE。
Libraries
Libraries是用于相关目的的函数的集合。
特性:
- 可被BSW模块(包括RTE),SW-Cs、libraries或者集成代码调用;
- 在同一保护环境中的调用者的上下文中运行;
- 可重新进入;
- 没有内部状态;
- 不需要任何初始化;
- 是同步的,即它们没有等待点。
在AUTOSAR中描述的库:
- Fixed point mathematical,
- Floating point mathematical,
- Interpolation for fixed point data,
- Interpolation for floating point data,
- Extended functions (e.g. 64bits calculation, filtering, etc.),
- Bit handling,
- E2E communication,
- CRC calculation,
- Atomic multicore safe operations.
Types of Basic Software Module(BSW)
Driver
Driver可控制和访问内部或外部设备。
Internal Driver
内部设备指的是MCU内部的设备。比如:Internal EEPROM、Internal CAN controler、Internal ADC。
内部设备的驱动称为内部驱动(Internal Driver),位于MCAL层。
External Driver
外部设备指的是在ECU上,但在MCU外的设备。比如:External EEPROM、External watchdog、External flash。
外部设备的驱动称为外部驱动,位于ECU Abstraction Layer。外部驱动通过MCAL层的驱动(Internal Driver)访问外部设备。
例外:内存映射的外部设备(例如外部闪存)的驱动可以直接访问MCU。这些驱动位于MCAL层,因为它们依赖于MCU。
Interface
Interface包含了从在架构上位于它们之后的模块抽象而来的功能。比如:一个接口抽象于一个特定设备的硬件实现,它提供了一个通用的API来访问一个特定类型的设备,独立于该类型的现有设备的数量和不同设备的硬件实现。Interface不会改变数据的内容。
一般地,Interface位于ECU Abstraction Layer。
例子:一个CAN通信系统的接口提供了一个通用的API来访问CAN通信网络,独立于ECU上CAN控制器的数量和硬件实现(on chip, off chip)。
Handler
处理程序是一个特定的接口,它控制一个或多个客户端对一个或多个驱动程序的并发、多发、异步访问。即,它执行缓冲、排队、仲裁、多路复用功能。它不会改变数据的内容。
Handler通常包含在驱动和接口中(比如:SPIHandlerDriver、ADCDriver)。
Manager
Manager为多客户端提供特定的服务。在纯Handler的功能不足以从多个客户端进行抽象的所有情况下,都需要它。
一般地,Manager位于Service Layer。
例子:NVRAM manager管理对内部或外部存储器(比如Flash、EEPPROM)的并发访问。它还执行分布式的和可靠的数据存储、数据检查、默认值的提供等功能。
