Polyhedral Model: DNN Nested Loop 的实现模型
循环是迭代空间的一个点
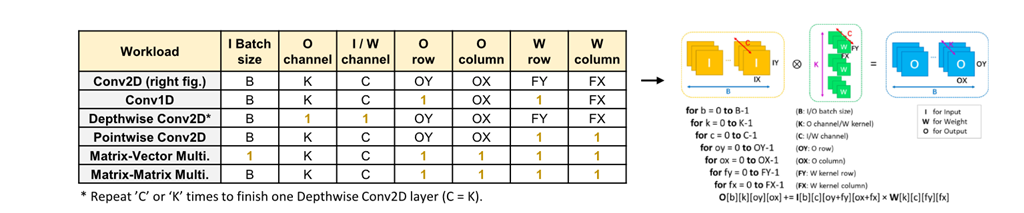
使用嵌套循环(Nested Loop)抽象不同的 DNN 乘加算子[1],使用多面体数学模型(Polyhedral Model)抽象循环的变换优化。
多面体模型里循环可以用迭代向量或者迭代点表示,我们以常见的 Linear Projection Layer 为例分析,该循环的迭代向量表示为 \((b, o, i) \in R^3\)
For b in [0, B-1]:
For o in [0, O-1]:
For i in [0, I-1]:
y[b][o] += x[b][i] * w[o][i] // 循环语句 S
则循环被抽象为了迭代向量按某个次序排序,比如这个循环就是 \((b,o,i)\) 依次为 \((0,0,0),(0,0,1),...,(0,0,I-1),...,(B-1,O-1,I-1)\)。多面体表示忽略了具体循环语句 S 的执行内容。
为了便于用仿射变换表示后续操作,我们使用向量的增广表示 \(X = (b, o, i, 1) \in R^4\)(后文在涉及仿射变换时使用 \((b,o,i,1)\) 某些分析则使用 \((b,o,i)\) 不做特别区分)。
也有添加多个常数表示迭代向量的[2],比如 \((b,o,i,B,O,I,1)\),它们数学本质是一样的
迭代变量的定义域叫做迭代空间(Iteration Space),迭代空间是一组不等式组, e.g.
迭代空间可以用 \(D(X)\ge 0\) 统一表示,特别的,当迭代空间是线性时,则可以用一个矩阵表示迭代空间,即 \(D(X)=DX\ge 0\),e.g.
调度是迭代空间上超平面的序列
一个循环可以以多种方式执行,这称作调度(Scheduling)。比如可以先遍历 i \((0,0,0),(0,0,1),(0,0,2),...\) ,也可以先遍历 b \((0,0,0),(1,0,0),(2,0,0),...\) 。调度要在循环上刻下时间的维度,也可以说,调度是循环到时间的映射:
对于迭代空间上的每个点,都能通过调度函数映射到时间步 \(t\) (timestep),t 代表了循环的执行次序,t 值越小的,执行越靠前,我们将空间里的各个点按 t 值排序,即将循环序列化。
\(F(X)=t\) 本质是描述了一个超平面,因此我们也可以说调度是迭代空间上超平面的序列。e.g. 还是 Linear 层的循环,其对应的调度函数为 \(F(X)=b+\frac{o}{B} + \frac{i}{B\times N} = t\)。
特别的,满足线性时调度也能用调度变量表示,此时调度函数为调度向量和迭代向量的内积,即
e.g. \(F = [1, \frac{1}{B}, \frac{1}{B\times I}, 0]\)
调度的超平面并非可以任意选取,要满足数据依赖性,比如以下的例子:
For i in [0, I-1]:
x[i+2] += x[i+1] * x[i] // 循环语句 S
显然,迭代点 \((0)\) 并不能在 \((1)\) 之后执行,也就是调度超平面满足 \(if\ F(X_1)<F(X_2)\ then\ i_1<i_2\)。依赖性可以进一步扩展到更加复杂的条件约束,这规定了自动化算法的搜索空间。
循环变换
将算法抽象表示并不能直接得到硬件部署,我们要先能够映射到目标平台(Mapping),再进行优化。
不同的算法平台的硬件规格(比如空间计算的维度),执行算法范式(比如存算、脉动阵列)不同,要将循环和目标硬件对齐。
就拿存算举例,Linear 的 nested loop 表示每个循环语句单元是元素乘加,然而存算是向量乘加(向量内积),粒度比 nested loop 更高,且一部分累加要靠后续的累加器完成。
一种处理到存算计算范式的方法是循环分块(Tilling),即将一个循环切换为多个循环。e.g. 对 i 循环切为多个长度为 R 的小块,则每个小块代表执行了一次向量内积。
映射到存算计算范式的方法并不唯一,Tilling 是一种保持数据连续性的映射方法
For b in [0, B-1]:
For o in [0, O-1]:
For ir in [0, floor(I/R)-1]:
For r in [0, R-1]:
y[b][o] += x[b][ir*R + r] * w[o][ir*R + r] // 循环语句 S
对于原循环,我们定义了迭代空间、约束条件,变换后的循环应当依然满足。比如迭代空间,很显然从新循环中能看出两个不等式 \(0\le ir \le floor(I/R)-1\),\(0 \le r \le R-1\),再结合变换关系 \(i = ir*R + r\) ,将此不等式带入原先迭代空间和约束条件之中,便能得到变换后的迭代空间和约束条件关系。
常见变换有,Fission, Fusion, Interchange, Tilling, Unrolling 等,其中一部分可以用仿射变换表示,其余不可(比如 Tilling 和 Unrolling)。
综上分析,循环的一部分子集可以用仿射变换表示,这有利于规范统一编译优化器,非仿射变换则要复杂得多。编译器有了初始值、有了迭代方法(变换方法)、有了性能评估(Evaluator),就可以开始迭代优化算法了。本文不讨论 Evaluator 和 Optimize 部分。
控制信号是 Trigger
假设我们通过优化得到某个调度方案 \(F(X)\)。我们还需要导出复杂的控制流,比如什么时候刷新权重?什么时候清空累加器?什么时候写出数据什么时候输入数据种种。而这都能在多面体的数学模型下规范描述。
控制信号本质是在时间上的脉冲序列:
\(\mathbb{1}_T\) 是1函数,\(T\) 是一个 \(F(X)\) 的真子集(不会是子集,否则控制信号是一个常量,那么也不需要控制了)。这实际上是一个条件判断,当 \(F(X) \in T\) 时,输出控制信号。\(T\) 也可以按前面的用线性或非线性的表示,具体过程不展开。
Parashar, A., Raina, P., Shao, Y. S., Chen, Y.-H., Ying, V. A., Mukkara, A., Venkatesan, R., Khailany, B., Keckler, S. W., & Emer, J. (2019). Timeloop: A Systematic Approach to DNN Accelerator Evaluation. 2019 IEEE International Symposium on Performance Analysis of Systems and Software (ISPASS), 304–315. https://doi.org/10.1109/ISPASS.2019.00042 ↩︎
《可重构计算》,魏少军,刘雷波,尹首一 ↩︎

 浙公网安备 33010602011771号
浙公网安备 33010602011771号