
机器人大会/机器人产业链-笔记
一、机器人视觉
1) 机器人视觉分2D视觉和3D视觉。
2D视觉技术原理是根据灰度及对比度来进行参考检测,其主要功能是:识别、测量、定位、检测。
2D视觉系统中,图像有两个轴,X和Y。
2D视觉应用场景:
二维特征和位置的检测、二维尺寸检查、条码读取、字符识别、标签检测、某些质量检验流程、监视和对象跟踪、有无检测等
3D机器视觉应用场景:机器人引导和表面跟踪、用于放置、包装或组装的料箱拣选对象扫描和数字化构建、厚度、高度和体积测量、尺寸标注和空间管理、测量形状,孔,角度和曲面、检测表面或装配缺陷、相对3DCAD模型的质量控制和验证。
机器视觉系统主要由5个要素组成:
- 照明(特定于视觉系统)
- 光学镜头
- 数字成像传感器(CMOS 或 CCD)
- 图像处理软件
- 通讯
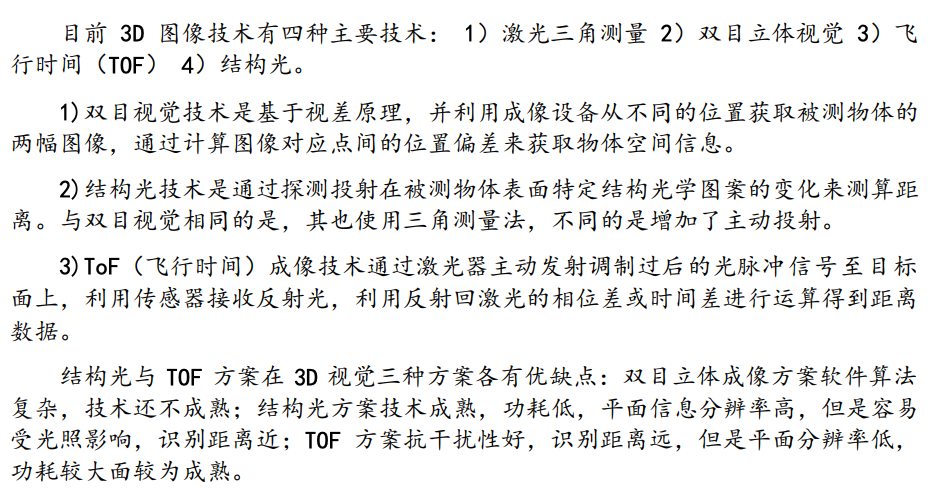
2)机器人视觉:3D视觉
机器人看:1. 深度信息;2.颜色信息
人眼之间的距离,成为“基线”,约为6cm。
在 3D 机器视觉中,基线是指两个摄像头之间的距离,或者摄像头和图案投影仪之间的距离。
基线是 3D 成像的关键因素,
- 激光三角测量 ——空间域
- 双目立体视觉——空间域
- 结构光——时间域
- 飞行时间ToF——时间域。ToF又分I-ToF、D-ToF

这些系统生成的三维信息被称为“点云”。
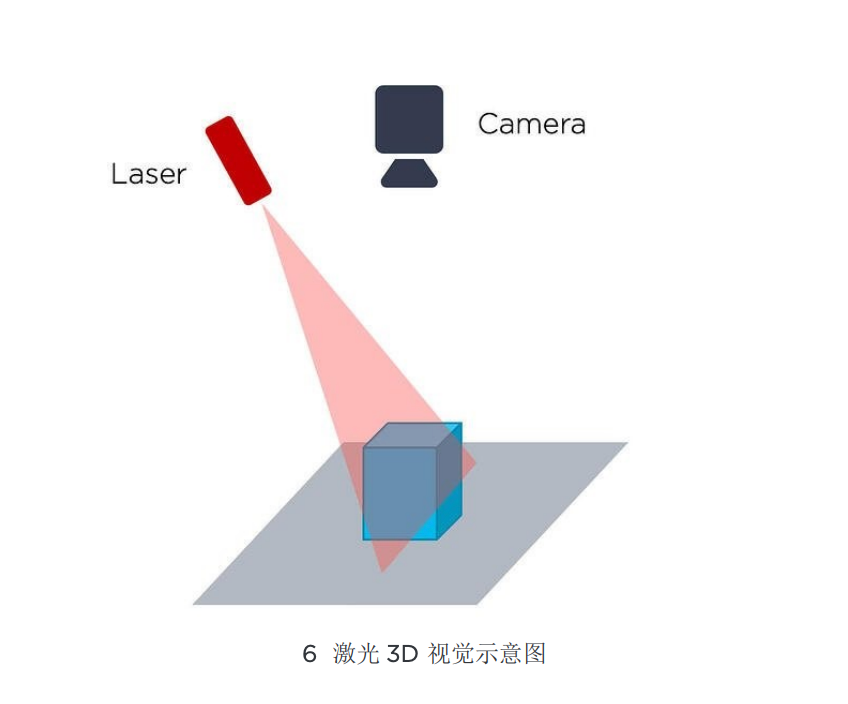
3)3.1 激光三角测量
激光三角测量或激光轮廓分析技术涉及通过窄激光束移动目标物体。 相机与激光发射器成一 定角度布置,并记录反射光束穿过物体时的情况。 该过程发生多次然后生成对象的复合 3D 点云。
它也有明显的缺点。 它是单色光源,因此无法拍摄彩色点云。 此外,它的拍照速度非常慢, 因为激光必须在物体上下重复扫描以生成点云。 激光三角测量方法可用于传送带扫描场景, 激光器可以固定起来扫描传送带上缓慢经过的物体。
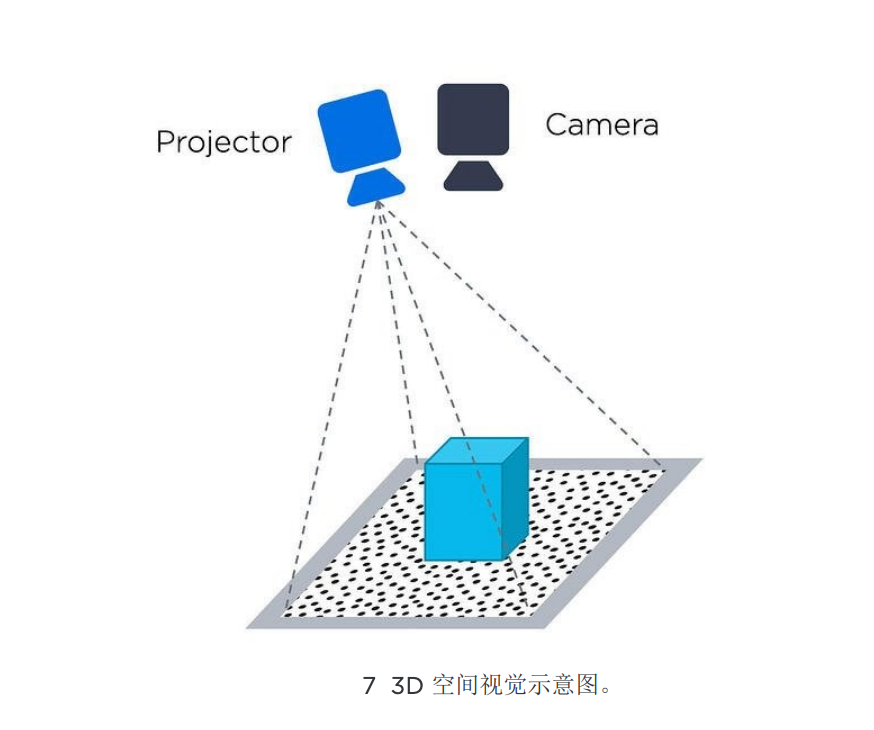
3.2 双目结构光
双目技术的缺点是算法复杂,计算量大。且光照较暗或者过度曝光的情况下效果差。
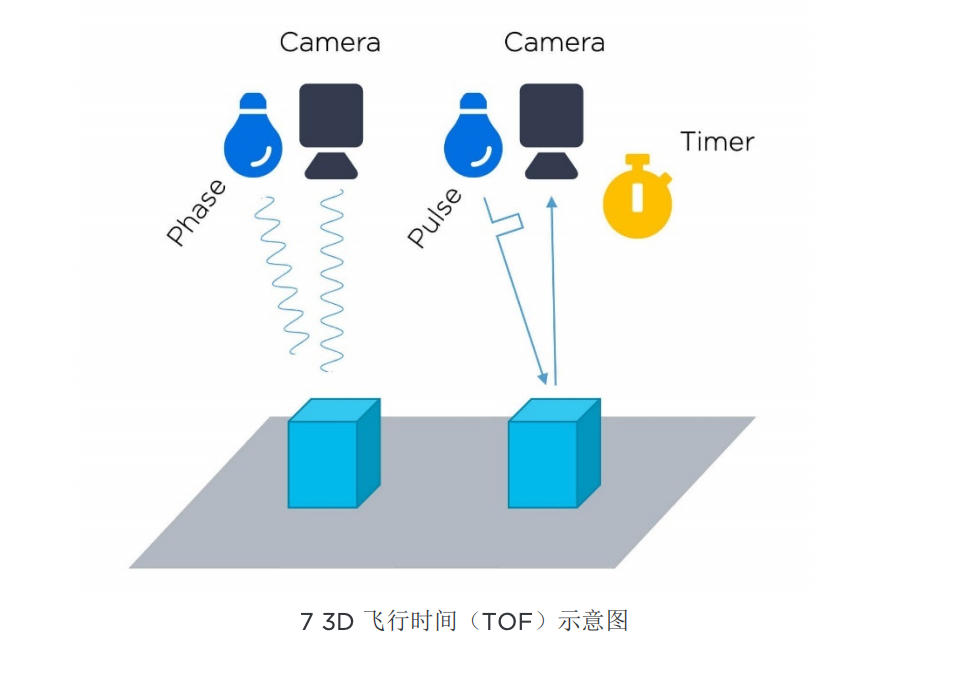
3.3 飞行时间ToF。Time of Flight。
通过给目标物连续发送光脉冲,然后用传感器接收从物体返回的光,通过探测光脉冲的飞行时间来得到目标物距离。
采用时域而非空间域方法进行 3D 成像,飞行时间激光扫描仪(有时称为 LIDAR 系统或激光 雷达)可有效去除基线。 我们可以通过测量发射的激光和从物体表面反射的激光之间的时间 延迟来获得精确的距离测量值。
TOF技术的缺点是分辨率低、不能精密成像、而且成本高。
3.3 结构光
二、公司:
国内:奥比中光(国内最早做3D方案重点市场:手机及非手机市场)
安思疆(dToF)、华捷艾米、银牛微电子(芯片+双目成像)、瑞识智能(3D结构光模组)、深视智能、芯歌智能(激光3D)
1、 舜宇智能光学
2、奥比中光

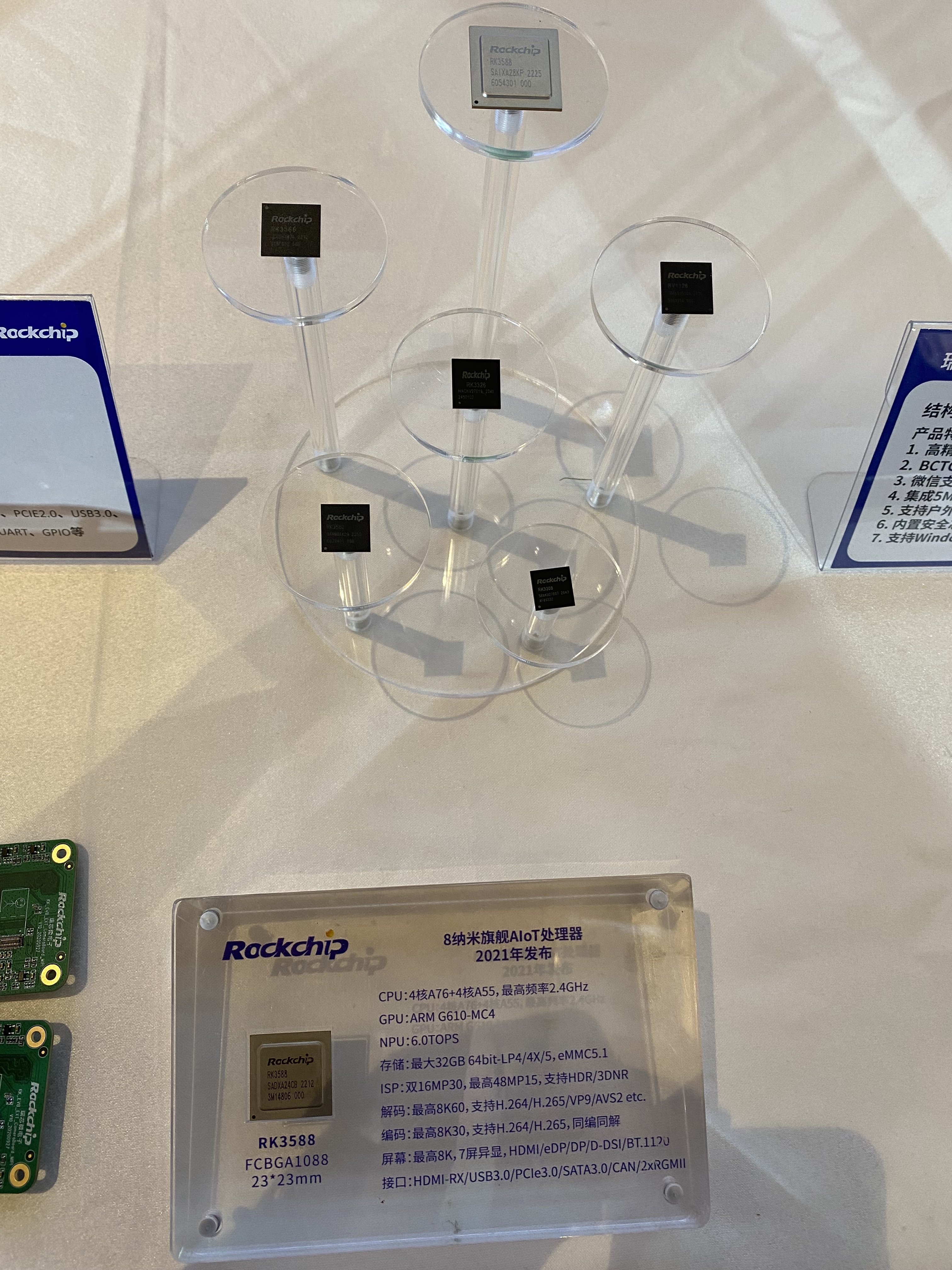
三、瑞芯微电子 Rockchip
2020年2月在上交所上市,股票代码:603893。 领先的物联网(IoT)及人工智能物联网(AIoT)处理器芯片企业。


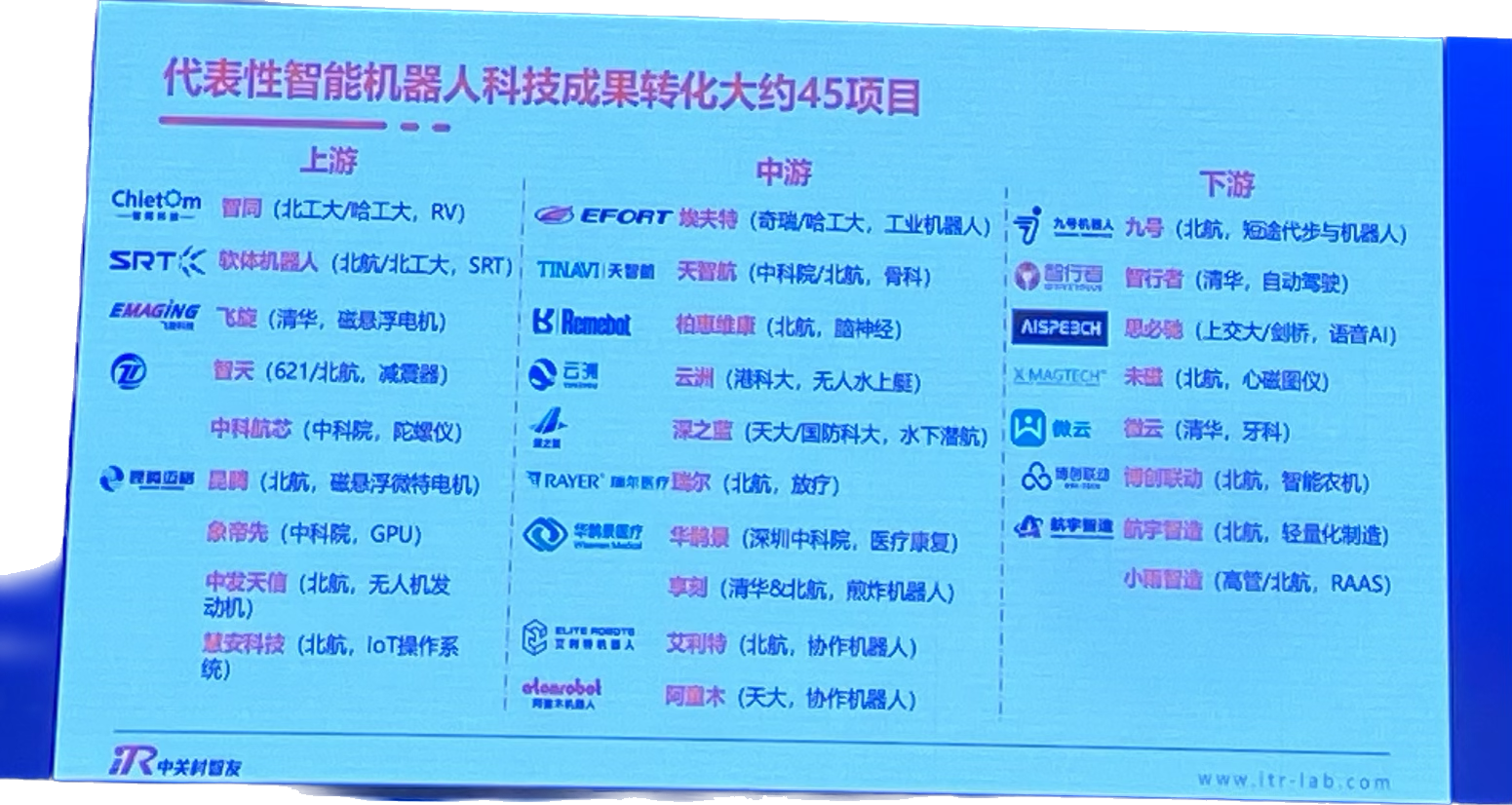
四、机器人产业链
上游:基础原材料、核心零部件、
中游:机器人本体、系统集成
下游:个人/家庭应用(To C)、商务服务应用(To B)


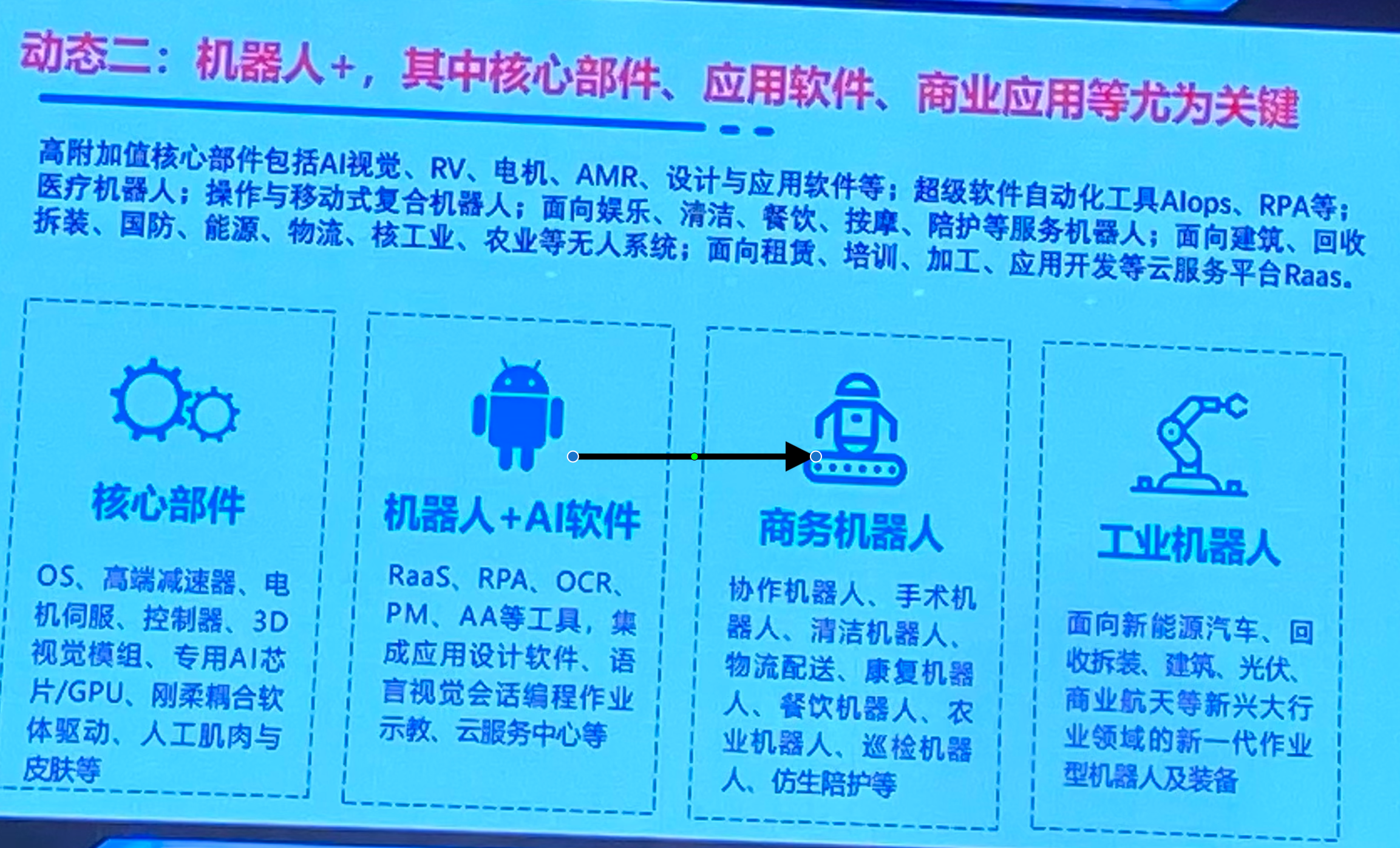
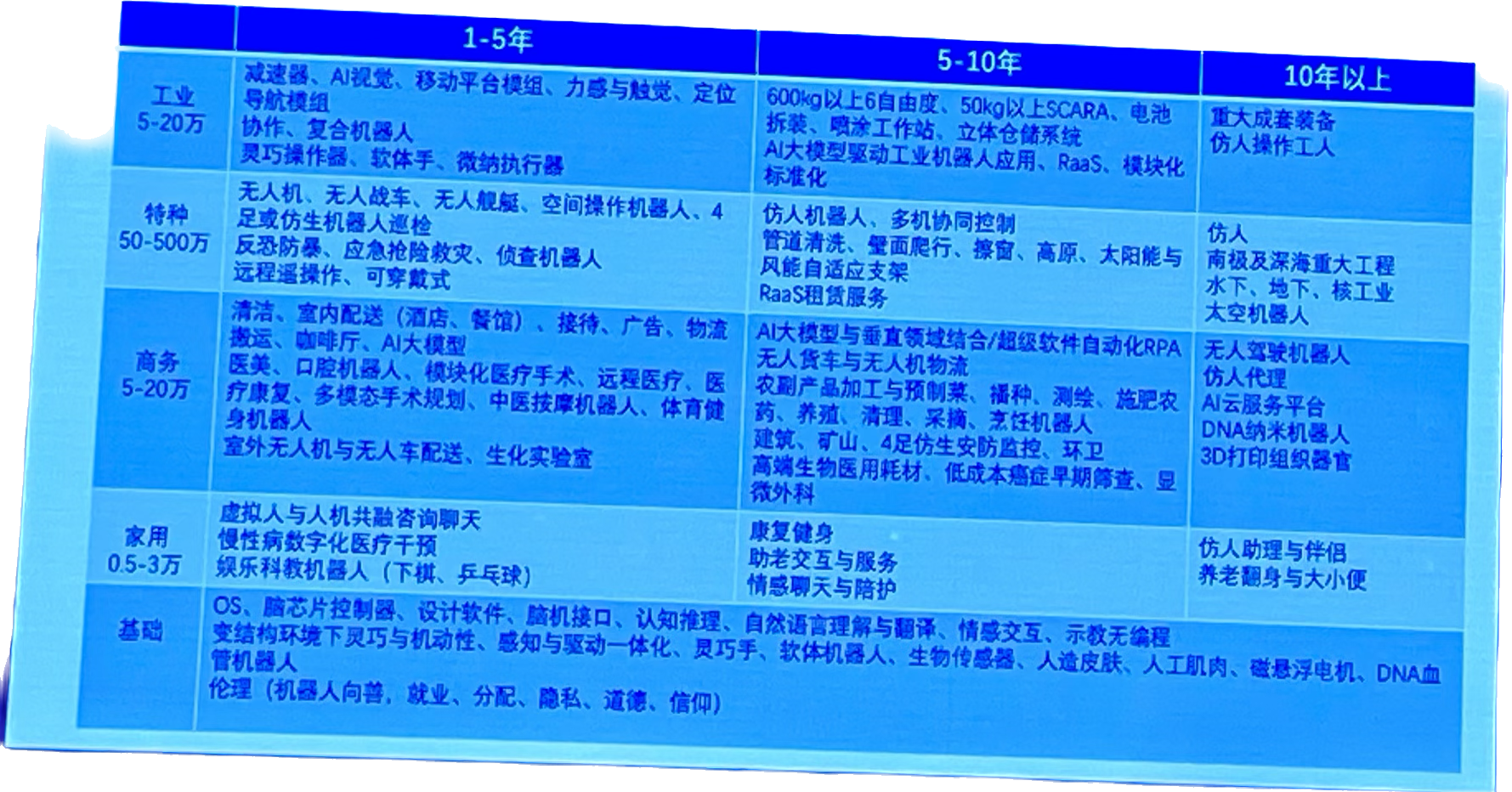
 工业机器人、服务机器人、特种机器人
工业机器人、服务机器人、特种机器人
中国总体趋势:工业机器人——> 机器人+行业应用——机器人+家庭服务
2010-2020 智能手机产业 快速发展
2015-2025 智能汽车产业 快速发展
2020-2050 智能机器人产业 快速发展
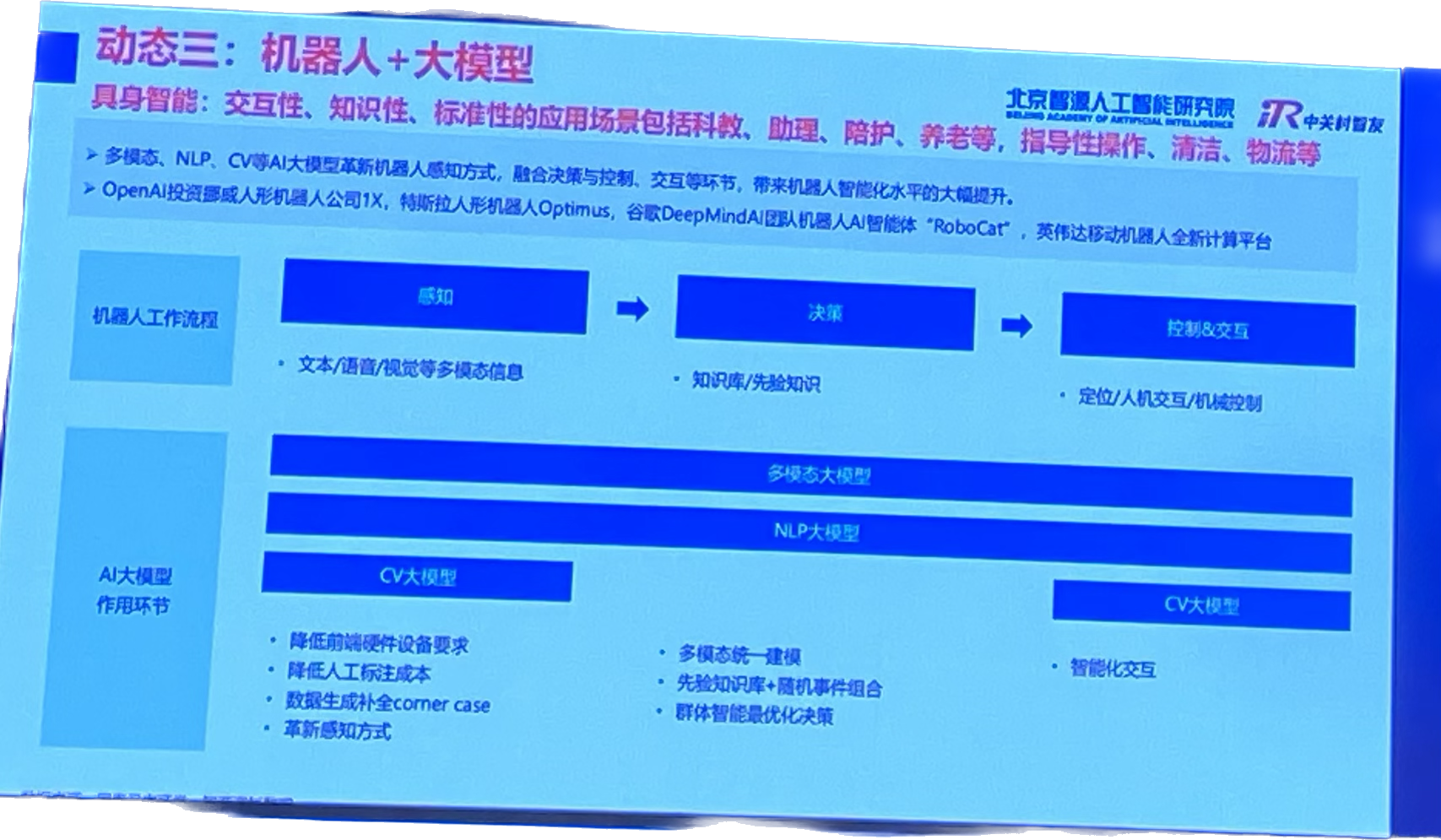
机器人技术关键三要素:感知、决策、控制
感知:机器人感觉器官
决策:机器人中枢大脑
控制:机器人运动能
五、什么是直驱技术
传统的驱动技术装置类似于火车,通过机械传动装置将旋转运动转化为直线运动。
直驱技术好比磁悬浮列车,通过电机直接驱动负载,省去中间转化环节。
直驱技术是指将电机直接安装在驱动负载上,不通过传动装置(如齿轮、皮带等)进行间接传动的一种技术。传统的传动系统中,电机通过传动装置将转速和扭矩传递给驱动负载,而直驱技术利用直接安装在驱动负载上的电机,能够实现更高的效率和更精确的控制。
六、
钛米机器人、竹间、地平线、旷通科技、睿尔曼Realman
七、Matter协议
Matter协议的设备将可以兼容Alexa、Google Home和HomeKit生态。
现在,这些不同生态的产品正式实现了互联互通,这意味着,你的iPhone可以控制谷歌、三星和小米的智能家居设备了。
