bock transform 和KL 变换
概述
无论是在图像处理领域还是数据领域,KL变换或者称PCA都是一种很重要的手段,通过这种方法,我们能把降低数据的维度,保留最重要的信息,从而达到压缩或者减轻数据处理的复杂度。这篇文章主要从图像的角度来解释一下什么是KL变换。首先需要了解一下KL变换的背景知识,block transform
Block Transform
何为Block transform? 首先需要说明,block transform是一种线性变换,\( T(v1+v2) = T(v1)+T(v2) \\T(\alpha v) = \alpha T(v) \) 通过block transfom,图像的能量可以集中在最初的几个参数上,这样我们可以把后面的参数置零,从而达到压缩的目的。因为在反变换时用到逆矩阵,而逆矩阵的运算会带来很多麻烦,所以一般block transform的变换矩阵都是酉矩阵。 *T表示共轭转置。 如果A实矩阵那么它的转置即为逆。
*T表示共轭转置。 如果A实矩阵那么它的转置即为逆。
酉矩阵有很多好的特点:
\(y = Ax \space\space x=A^{-1}y=A^Hy\)
\(\|\mathbf{y}\|^{2}=\mathbf{y}^{H} \mathbf{y}=(\mathbf{A} \mathbf{x})^{H} \mathbf{A} \mathbf{x}=\mathbf{x}^{H} \mathbf{A}^{H} \mathbf{A} \mathbf{x}=\mathbf{x}^{H} \mathbf{x}=\|\mathbf{x}\|^{2}\)
对于酉矩阵变换
平均值为
\(\boldsymbol{\mu}_{y}=E[\mathbf{y}]=E[\mathbf{A} \mathbf{x}]=\mathbf{A} E[\mathbf{x}]=\mathbf{A} \boldsymbol{\mu}_{x}\)
协方差为
\(\mathbf{R}_{y y}=E\left[\left(\mathbf{y}-\boldsymbol{\mu}_{y}\right) \cdot\left(\mathbf{y}-\boldsymbol{\mu}_{y}\right)^{H}\right]=\mathbf{A} \mathbf{R}_{x x} \mathbf{A}^{H}\)
通过酉矩阵变换,能量会集中在最前面的几个参数,而能量通过协方差观察到。这里一个例子
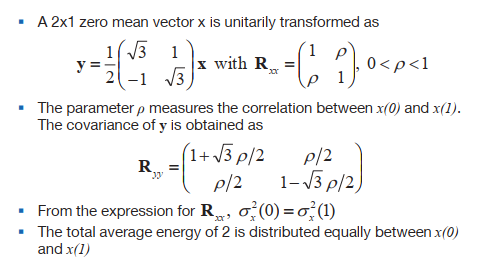
当 p = 0.95时,91.1%的能量都集中在第一个参数上。
因为有这种良好的性质,在图像处理中,往往将图像分为很多正方形,对每一个正方形进行block transform,将大部分信息都放在最初的几个参数上,达到图像压缩的目的。
在图像处理中,经常用到的Harr, DCT 变换就运用这种方式,通常有很好的效果。而所有变换都不能完全将能量集中在最开始的几个参数,并且每个维度之间uncorrelate 协方差成为一个对角线矩阵。如果想达到这种目的,只有通过KL变化
KL 变换
KL 变换是最优变化, 通过KL变换,图像成为 Best decoorelation and energy concentration. 那KL变换如何做到呢。
对于一个协方差矩阵来说, 可以将协方差矩阵分解为包含特征值和特征向量的矩阵。 \(C_{xx} = UVU^T\) 其中\(U\) 每一列为一个特征向量。\(V\)是一个对角线矩阵,对角线上对应特征值。得到\(U\) \(V\), 对特征值从大到小排序,并且调整特征向量,将\(U^T\)作为变换矩阵。 \(Y=U^TX\)。
为什么这样就可以得到最优的\(C_yy\)呢。
\( C_{yy} = A^TC_{xx}A\\ \Rightarrow C_{yy} = UC_{xx}U^T\\ \Rightarrow C_{yy} =UUVU^TU = V \)
\(C_{yy}\) 就是特征值矩阵,也就是对角矩阵
对于协方差有一点说明
虽然协方差\(C = E[((X-\mu)^T(X-\mu)]\) 由于数据不同,公式也可以变。
如果
每一个小方块对应4个像素 一共有6个方块 每一列相当于一个维度。协方差为\(C = E[((X-\mu)^T(X-\mu)]\)
| 1 block | 1 | 2 | 3 | 4 |
| 2 block | 1 | 2 | 3 | 4 |
| 3 block | 1 | 2 | 3 | 4 |
| 4 block | 1 | 2 | 3 | 4 |
| 5 block | 1 | 2 | 3 | 4 |
| 6 block | 1 | 2 | 3 | 4 |
如果每一行是一个维度 协方差为\(C = E[(X-\mu)(X-\mu)^T]\)
| 1 block | 2 block | 3 block | 4 block | 5 block | 6 block |
| 1 | 1 | 1 | 1 | 1 | 1 |
| 2 | 2 | 2 | 2 | 2 | 2 |
| 3 | 3 | 3 | 3 | 3 | 3 |
| 4 | 4 | 4 | 4 | 4 | 4 |
代码 matlab
function [blocks , C_im , klt_base ] = compute_klt_basis (im)
N=8;
% 1. Allocate memory for blocks
sz = size (im);
x_arr = 1:N:( sz (2) - N+1);
y_arr = 1:N:( sz (1) - N+1);
blocks = zeros ( length ( x_arr ) * length ( y_arr ), N*N);
%2. Regroup the input image into blocks
for iy = 1: length ( y_arr )
for ix = 1: length ( x_arr )
x_start = x_arr (ix); y_start = y_arr (iy);
block_in = im( y_start : y_start +N -1, x_start : x_start +N -1);
blocks ((iy -1)* length ( x_arr ) + ix , :) = block_in (:);
end
end
%3. Compute autocorrelation over all blocks
C_im = blocks '* blocks / size (blocks ,1);
[ klt_base_v ,ew] = eig( C_im );
[ew , ew_idx ] = sort ( diag (ew), 'descend ');
klt_base_v = klt_base_v (:, ew_idx );
klt_base = zeros (N^2);
for x = 0:N -1
for y = 0:N -1
idx = x*N+y+1;
klt_base (y*N +1:( y+1)*N, x*N +1:( x+1)*N) = ...
reshape ( klt_base_v (:, idx ), N, N);
end
end
end

 浙公网安备 33010602011771号
浙公网安备 33010602011771号