DS博客作业04--图
| 这个作业属于哪个班级 | 数据结构--网络2011/2012 |
| ---- | ---- | ---- |
| 这个作业的地址 | DS博客作业04--图 |
| 这个作业的目标 | 学习树结构设计及运算操作 |
| 姓名 | 邓宏 |
0.PTA得分截图

1.本周学习总结(6分)

1.1 图的存储结构
1.1.1 邻接矩阵

邻接矩阵的结构体定义
typedef struct
{ int edges[MAXV][MAXV]; /*邻接矩阵*/
int n,e; /*顶点数、弧数*/
} MGraph;
建图函数
void CreateMGraph(MGraph& g, int n, int e)//建图
{
int a, b;
//初始化矩阵
for (int i = 1; i <= MAXV; i++) {
for (int j = 1; j <= MAXV; j++) {
g.edges[i][j] = 0;
}
}
//填入对应
for (int i = 1; i <= e; i++) {
cin >> a >> b;
g.edges[a][b] = 1;//无向图需要两个边都为一
g.edges[b][a] = 1;
}
g.e = e;
g.n = n;
}
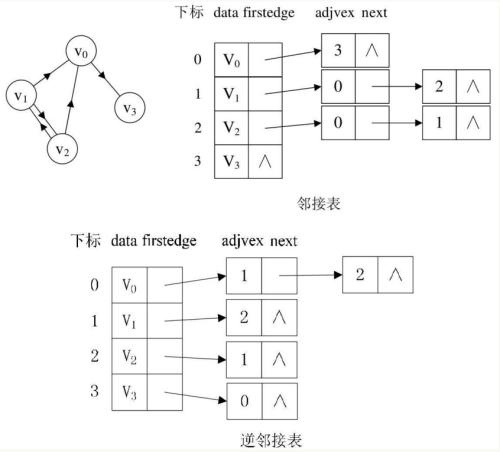
1.1.2 邻接表
邻接矩阵的结构体定义
typedef struct ANode
{
int adjvex; //该边的终点编号
struct ANode* nextarc; //指向下一条边的指针
int info; //该边的相关信息,如权重
} ArcNode; //边表节点类型
typedef int Vertex;
//声明邻接表头节点类型
typedef struct Vnode
{
Vertex data; //顶点信息
ArcNode* firstarc; //指向第一条边
} VNode; //邻接表头节点类型
typedef VNode AdjList[MAXV];
//声明图邻接表类型
typedef struct
{
AdjList adjlist; //邻接表
int n, e; //图中顶点数n和边数e
} AdjGraph;
建图函数
void CreateAdj(AdjGraph& G, int n, int e) //创建图邻接表
{
int a, b;
ArcNode p;
G = new AdjGraph;
//初始化
for (int i = 0; i < n; i++)G->adjlist[i].firstarc = NULL;
for (int i = 1; i <= e; i++) {
cin >> a >> b;
//建立a与b之间的关系
p = new ArcNode;
p->adjvex = b;
p->nextarc = G->adjlist[a].firstarc;
G->adjlist[a].firstarc = p;
//建立b与a之间的关系
p = new ArcNode;
p->adjvex = a;
p->nextarc = G->adjlist[b].firstarc;
G->adjlist[b].firstarc = p;
}
G->n = n; G->e = e;
}
1.1.3 邻接矩阵和邻接表表示图的区别
对于一个具有n个顶点e条边的无向图
它的邻接表表示有n个顶点表结点2e个边表结点
对于一个具有n个顶点e条边的有向图
它的邻接表表示有n个顶点表结点e个边表结点
如果图中边的数目远远小于n2称作稀疏图,这是用邻接表表示比用邻接矩阵表示节省空间;
如果图中边的数目接近于n2,对于无向图接近于n*(n-1)称作稠密图,考虑到邻接表中要附加链域,采用邻接矩阵表示法为宜。
故邻接矩阵适合稠密图,时间复杂度为O(n^2)
链表存储数据,适合稀疏图,时间复杂度为O(nlogn)
1.2 图遍历
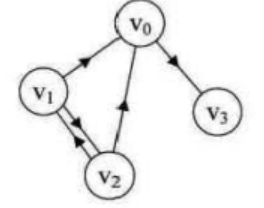
1.2.1 深度优先遍历
深度优先遍历顺序(v1开始):v1->v2->v0->v3
深度遍历代码
//邻接矩阵
void DFS(MGraph g, int v)//深度遍历
{
int i;
//控制空格输出
if (flag==0) {
cout << v;
flag = 1;
}
else cout << " " << v;
visited[v] = 1;//标记已经走过的点
for (i = 1; i <= g.n; i++) {
if (g.edges[v][i]&&!visited[i]) DFS(g, i);
}
}
//邻接表
void DFS(AdjGraph* G, int v)//v节点开始深度遍历
{
ArcNode* p;
visited[v] = 1;//置已访问标记
//控制空格输出
if (flag == 0) {
cout << v;
flag = 1;
}
else cout << " " << v;
p=new ArcNode;//用于遍历v后面的链表
p = G->adjlist[v].firstarc;
while (p != NULL){
if (!visited[p->adjvex])
DFS(G, p->adjvex);
p = p->nextarc;
}
}
适用案例如:
是否有简单路径?
#include <stdio.h>
#include <malloc.h>
#include "graph.h"
int visited[MAXV]; //定义存放节点的访问标志的全局数组
void ExistPath(ALGraph *G,int u,int v, bool &has)
{
int w;
ArcNode *p;
visited[u]=1;
if(u==v)
{
has=true;
return;
}
p=G->adjlist[u].firstarc;
while (p!=NULL)
{
w=p->adjvex;
if (visited[w]==0)
ExistPath(G,w,v,has);
p=p->nextarc;
}
}
void HasPath(ALGraph *G,int u,int v)
{
int i;
bool flag = false;
for (i=0; i<G->n; i++)
visited[i]=0; //访问标志数组初始化
ExistPath(G,u,v,flag);
printf(" 从 %d 到 %d ", u, v);
if(flag)
printf("有简单路径\n");
else
printf("无简单路径\n");
}
int main()
{
ALGraph *G;
int A[5][5]=
{
{0,0,0,0,0},
{0,0,1,0,0},
{0,0,0,1,1},
{0,0,0,0,0},
{1,0,0,1,0},
}; //请画出对应的有向图
ArrayToList(A[0], 5, G);
HasPath(G, 1, 0);
HasPath(G, 4, 1);
return 0;
}
问题:假设图G采用邻接表存储,设计一个算法,判断顶点u到v是否有简单路径。
1.2.2 广度优先遍历
广度优先遍历结果(v1开始):v1->v0->v2->v3
广度遍历代码
//邻接矩阵
void BFS(MGraph g, int v)//广度遍历
{
int f = 0,r=0,k;
int que[MAXV*5];//队列辅助
//控制空格的输出
if (flag) {
cout << v;
flag = 0;
}
visited[v] = 1;//标记已经走过的点
que[r++] = v;
while (f!=r) {
k = que[f++];
for (int j = 1; j <= g.n; j++) {
if (g.edges[k][j] && !visited[j]) {
cout << " " << j;
visited[j] = 1;
que[r++] = j;
}
}
}
}
//邻接表
void BFS(AdjGraph* G, int v) //v节点开始广度遍历
{
queue<int> q;
int w;
ArcNode* p;
q.push(v);//第一个结点入队列
visited[v] = 1;
cout << v;
while (!q.empty()) {
w = q.front();//访问队头
q.pop();
p = new ArcNode;
p = G->adjlist[w].firstarc;//访问w第一条边
while (p != NULL){
w = p->adjvex;//边的邻接点
if (!visited[w]){ // 若当前邻接点未被访问
q.push(w);//该顶点进队
visited[w] = 1;//置已访问标记
cout << " " << w;
}
p = p->nextarc; //找下一个邻接点
}
}
}
适用案例如:
广度优先求解迷宫问题最短路径
include<Queue.h>
#pragma once
#define MaxSize 100
typedef struct
{
int i, j; //方块在地图中的位置
int pre; //该路径中上一个方块在队列中的下标
}Box; //方块类型
typedef struct
{
Box data[MaxSize];
int front, rear;
}Queue; //用于存放路径的队列
void InitQueue(Queue *& q)
{
q = (Queue *)malloc(sizeof(Queue));
q->front = q->rear = -1;
}
void DestroyQueue(Queue *&q)
{
free(q);
}
bool QueueEmpty(Queue *q)
{
return (q->front == q->rear);
}
bool enQueue(Queue *& q, Box e)
{
if (q->rear == MaxSize - 1)
return false;
q->rear++;
q->data[q->rear] = e;
return true;
}
bool deQueue(Queue *& q, Box & e)
{
if (q->rear == q->front)
return false;
q->front++;
e = q->data[q->front];
return true;
}
cpp:
#include <iostream>
#include "Queue.h"
#define M 8
#define N 8
using namespace std;
int map[M + 2][N + 2] = { //地图,1为不可走,0为可走
{1,1,1,1,1,1,1,1,1,1},{1,0,0,1,0,0,0,1,0,1},{1,0,0,1,0,0,0,1,0,1},{1,0,0,0,0,1,1,0,0,1},{1,0,1,1,1,0,0,0,0,1},
{1,0,0,0,1,0,0,0,0,1},{1,0,1,0,0,0,1,0,0,1},{1,0,1,1,1,0,1,1,0,1},{1,1,0,0,0,0,0,0,0,1},{1,1,1,1,1,1,1,1,1,1}
};
void ShowPath(Queue *qu, int front) //输出正确路径
{
int p = front, p0;
do
{
p0 = p;
p = qu->data[p].pre;
qu->data[p0].pre = -1;//将正确路径的pre记为-1用以标记
} while (p != 0); //利用循环反向找出正确路经
cout << "最短路径:" << endl;
for (int k = 0; k < MaxSize; k++)
{
if (qu->data[k].pre == -1)
{
cout << "(" << qu->data[k].i << "," << qu->data[k].j << ")";
cout << "->";
}
}
}
bool Path(int x0, int y0, int x, int y) //广度优先找最优解
{
int i, j, i0, j0; //i,j存储当前方块位置,i0,j0存储找到新路径的位置
Box e; //当前方块
Queue * qu;
InitQueue(qu);
e.i = x0; //设置起点位置
e.j = y0;
e.pre = -1; //起点pre设置为-1;
enQueue(qu, e); //起点入队
map[x0][y0] = -1; //走过的点记为-1,表示不可再走
while (!QueueEmpty(qu)) //队非空时循环
{
deQueue(qu, e); //出队,用e存储
i = e.i; //记录该点坐标
j = e.j;
if (i == x && j == y)
{
ShowPath(qu, qu->front); //打印路径
DestroyQueue(qu);
return true;
}
for (int circle = 0; circle < 4; circle++) //遍历周围的方块,若方块可走就将其进队
{
switch (circle) //遍历顺序为:上,右,下,左
{
case 0:
i0 = i - 1;
j0 = j;
break;
case 1:
i0 = i;
j0 = j + 1;
break;
case 2:
i0 = i + 1;
j0 = j;
break;
case 3:
i0 = i;
j0 = j - 1;
break;
}
if (map[i0][j0] == 0) //移动至新位置
{
e.i = i0;
e.j = j0;
e.pre = qu->front; //用pre记录队列的数据下标
enQueue(qu, e);
map[i0][j0] = -1;
}
}
}
DestroyQueue(qu); //若队为空,说明遍历所有可以到达的方块后依旧找不到出口,即为无解
return false;
}
int main()
{
if (!Path(1, 1, 8, 8))
cout << "迷宫无正确路径";
return 0;
}
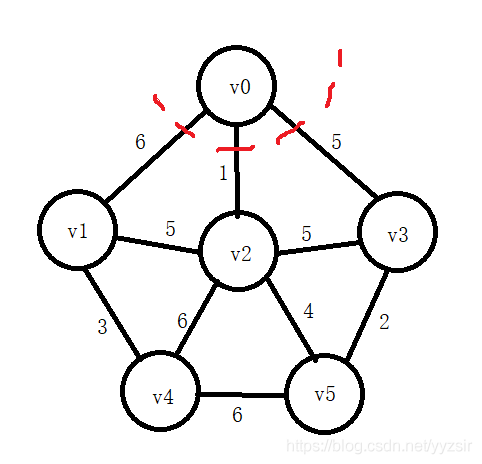
1.3 最小生成树
一个有 n 个结点的连通图的生成树是原图的极小连通子图,且包含原图中的所有 n 个结点,并且有保持图连通的最少的边。最小生成树可以用kruskal(克鲁斯卡尔)算法或Prim(普里姆)算法求出。
1.3.1 Prim算法求最小生成树

代码实现:
void Prim(MGraph g, int v)
{
int lowcost[MAXV], min, closest[MAXV],k;
for (int i = 0; i < g.n; i++) {//初始化lowcost与closest
lowcost[i] = g.edges[v][i];
closest[i] = v;
}
for (int i = 1; i < g.n; i++) { //找出(n-1)个顶点
min = INF;
for (int j = 0; j < g.n; j++) {//V-U中找出离U最近的顶点k
if (lowcost[j] != 0 && lowcost[j] < min) {
min = lowcost[j];
k = j;//k记录最近顶点的编号
}
}
printf("边(%d,%d)权为:%d\n", closest[k], k, min);
lowcost[k] = 0;//标记k已经加入U
for (int j = 0; j < g.n; j++) {//修改数组lowcost和closest
if (g.edges[k][j] != 0 && g.edges[k][j] < lowcost[j]) {
lowcost[j] = g.edges[k][j];
closest[j] = k;
}
}
}
}
实现Prim算法的2个辅助数组是什么?其作用是什么?Prim算法代码。
辅助数组:
1.closest保存路径
2.lowest存储一点到各点间的距离,同时判断顶点是否加入U集合
Prim算法中有两重for循环,时间复杂度为O(n^2),由于他执行时间与图中边数e关系无关,所以特别适合稠密图求最小生成树
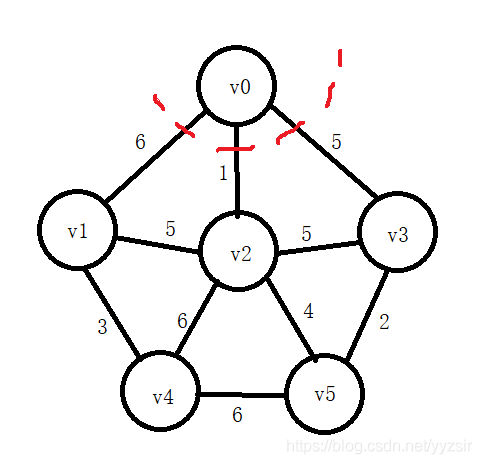
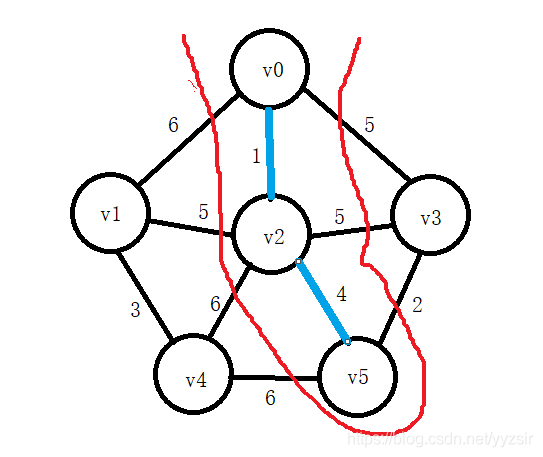
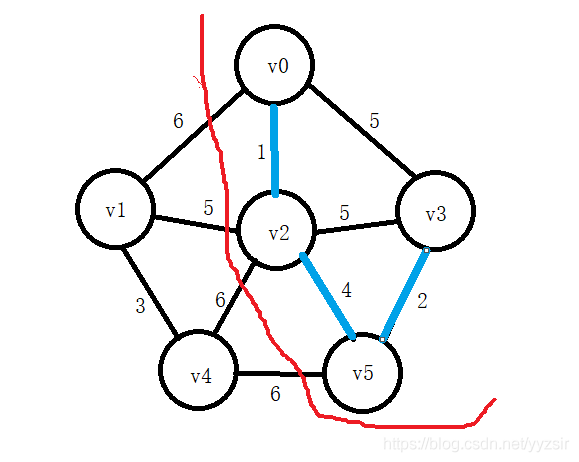
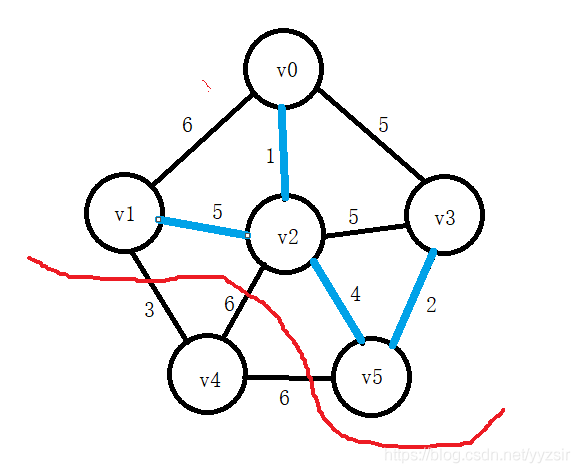
1.3.2 Kruskal算法求解最小生成树
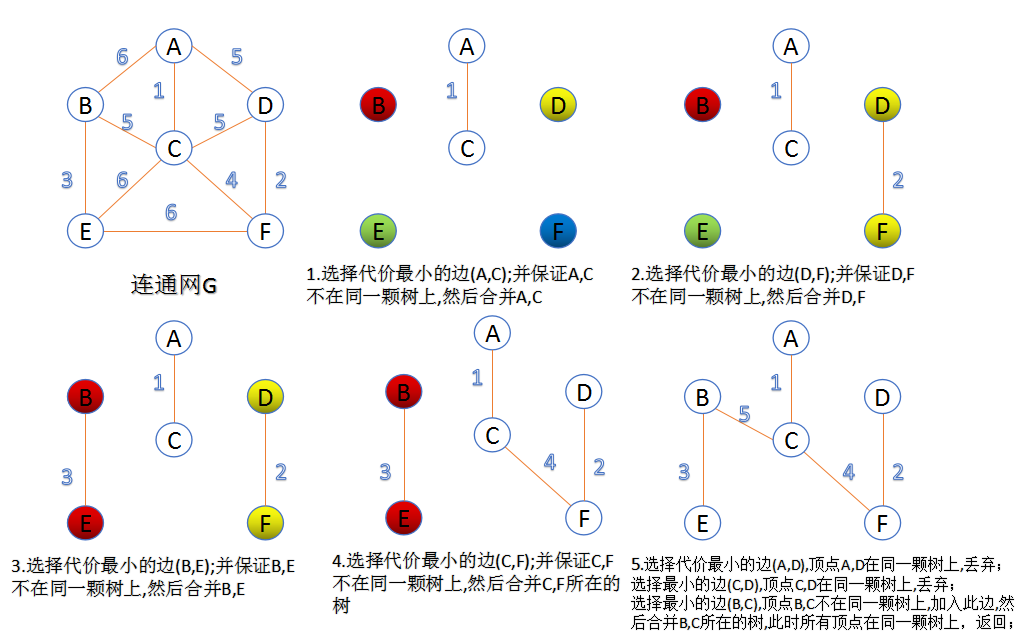
void Kruskal(AdjGraph *g)
{
int u1, v1, sn1, sn2, k=1,j;
int vset[MAXV];//集合辅助数组
UFSTree t[MAXV];//并查集,树结构
Edge E[MAXV];//存放所有边
ArcNode* p;
p = new ArcNode;
for (int i = 0; i < g->n; i++) {
p = g->adjlist[i].firstarc;
while (p != NULL) {
E[k].u = i;
E[k].v = p->adjvex;
E[k].w = p->weight;
k++; p = p->nextarc;
}
}
sort(E, E + g->n,cmp);//利用快排sort进行权值递增排序
MakeSet(t, g->n);//初始化并查集树t
k = 1; //k表示当前构造的树是第几条边
j = 1;
while (k < g->n) {
u1 = E[j].u;
v1 = E[j].v;
sn1 = FindSet(t, u1);
sn2= FindSet(t, v1);//得到两个顶点所属集合
if (sn1 != sn2) {//集合不同
printf("(%d,%d):%d\n", u1, v1, E[j].w);
k++;//生成边数+1
Union(t, u1, v1);//将两个顶点合并
}
j++;//进行下一条边
}
}
采用邻接矩阵,目的是为频繁地取一条条边的权
时间复杂度为O(elog2e),执行时间仅与图中的边数有关,与顶点数无关,故适用于稀疏图建数
1.4 最短路径
1.4.1 Dijkstra算法求解最短路径
辅助数组:
dist存储某点到各点间的最短距离
path存储各点距离最短的前驱
void Dijkstra(MGraph g,int v){
int dist[MAXV],path[MAXV];
int s[MAXV];
int mindis,u;
//dist和path数组初始化
for(int i=0;i<g.n;i++){
dist[i]=g.edges[v][i];
s[i]=0;
if(g.edges[v][i]<INF)path[i]=v;
else path[i]=-1;
}
s[v]=1;//将源点放在S中
for(int i=0;i<g.n;i++){
mindis=INF;
//找最小路径长度顶点u
for(int j=0;j<g.n;j++){
if(s[j]==0&&dist[j]<mindis){
u=j;
mindis=dist[j];
}
}
s[u]=1;//u加入S
for(int j=0;j<g.n;j++){//修改不在s中的顶点的距离
if(s[j]==0){
if(g.edges[u][j]<INF&&dist[u]+g.edges[u][j]<dist[j]){
dist[j]=dist[u]+g.edges[u][j];
path[j]=u;
}
}
}
}
Dispath(dist,path,s,g.n,v);//输出
}
时间复杂度为O(n^2),采用邻接矩阵表示
1.4.2 Floyd算法求解最短路径
void Floyd(MGraph g){
int A[MAXV][MAXV];
int path[MAXV][MAXV];
for(int i=0;i<g.n;i++){//初始化A与path
for(int j=0;j<g.n;j++){
A[i][j]=g.edges[i][j];
if(i!=j&&g.edges[i][j]<INF)path[i][j]=i;
else path[i][j]=-1;
}
}
for(int k=0;k<g.n;k++){
for(int i=0;i<g.n;i++){
for(int j=0;j<g.n;j++){
if(A[i][j]>A[i][k]+A[k][j]){//找更短路径
A[i][j]=A[i][k]+A[k][j];//进行修改
path[i][j]=k;
}
}
}
}
}
Floyd算法可以求得任意两个顶点的最短路,
Floyd算法需要两个二维数组A[][]与path[][]辅助,
Floyd算法优势:
Dijkstra不能处理负权图,Flyod能处理负权图;
Dijkstra需要求dist数组最短路径,Flyod不需要,且代码简
1.5 拓扑排序
结构体:
typedef struct //表头结点类型
{
Vertex data; //顶点信息
int count; //存放顶点入度
ArcNode *firstarc; //指向第一条边
}VNode;
代码:
void Floyd(MGraph g){
int A[MAXV][MAXV];
int path[MAXV][MAXV];
for(int i=0;i<g.n;i++){//初始化A与path
for(int j=0;j<g.n;j++){
A[i][j]=g.edges[i][j];
if(i!=j&&g.edges[i][j]<INF)path[i][j]=i;
else path[i][j]=-1;
}
}
for(int k=0;k<g.n;k++){
for(int i=0;i<g.n;i++){
for(int j=0;j<g.n;j++){
if(A[i][j]>A[i][k]+A[k][j]){//找更短路径
A[i][j]=A[i][k]+A[k][j];//进行修改
path[i][j]=k;
}
}
}
}
}
伪代码:
void TopSort(AdjGraph* G)
{
将count置初值0
再将所有顶点的入度记录在count中
遍历count
if count==0 进队列
遍历队列
输出顶点
所有点count--
如果 count==0 进队列
}
如何用拓扑排序代码检查一个有向图是否有环路?
在排序后判断各点count是否为0
1.6 关键路径
AOE-网:
一个工程常被分为多个小的子工程,这些子工程被称为活动,在带权有向图中若以顶点表示事件,有向边表示活动,边上的权值表示该活动持续的时间,这样的图简称为AOE网。---带权有向无环图
关键路径:
关键路径是从有向图的源点到汇点的最长路径
关键活动:
关键路径中的边叫关键活动
2.PTA实验作业(4分)
2.1 六度空间(2分)
2.1.1 伪代码
void BFS(MGraph& g,int u){
将u顶点标记
初始化dist[u]=0记录距离
将u进队列
cnt++;//用来表示几个人
while q
取出队头,判断距离dist是否大于6
循环矩阵,只要没有被标记并且有边
进队列,距离+1;标记已访问,cnt++
}
2.1.2 提交列表

2.1.3 本题知识点
new申请空间:new int* [MAXV + 1]
dis[]进行距离计算,visited[]进行标记
2.2 村村通或通信网络设计或旅游规划(2分)
2.2.1 伪代码
void Dijkstra(MGraph g, int v)
{
初始化dist数组、s数组、pay数组,dist数组
遍历图中所有节点
for(i = 0; i < g.n; i++)
若s[i]! = 0,则数组找最短路径,顶点为u
s[u] = 1进s
for(i = 0; i < g.n; i++)
if(g.edges[u][j].len < INF && dist[u] + g.edges[u][j].len < dist[j])
则修正dist[j] = dist[u] + g.edges[u][j].len;
pay[j] = pay[u] + g.edges[u][j].pay;
else if(路径一样长但是花费更少)
则修正pay[j] = pay[u] + g.edges[u][j].pay;
}
2.2.2 提交列表

2.2.3 本题知识点
最短路径Dijkstra算法

 浙公网安备 33010602011771号
浙公网安备 33010602011771号