
使用粒子滤波(particle filter)进行视频目标跟踪
虽然有许多用于目标跟踪的算法,包括较新的基于深度学习的算法,但对于这项任务,粒子滤波仍然是一个有趣的算法。所以在这篇文章中,我们将介绍视频中的目标跟踪:预测下一帧中物体的位置。在粒子滤波以及许多其他经典跟踪算法的情况下,我们根据估计的动态进行预测,然后使用一些测量值更新预测。
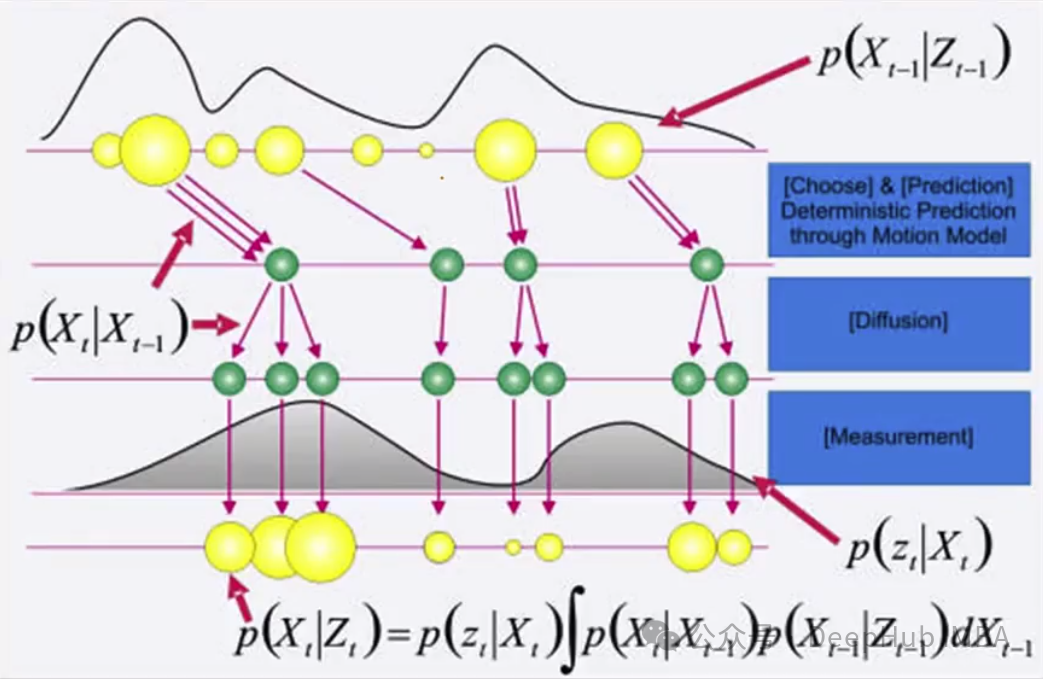
我们从数学理论开始。粒子滤波是一种贝叶斯滤波方法,主要用于非线性、非高斯动态系统中的状态估计。它通过使用一组随机样本(称为粒子)来表示状态的后验概率分布,并通过这些粒子的加权平均来估计状态。
在每个时间步(或视频中的一帧),对物体的位置有一些信念(也称为先验知识)。这种信念是基于我们从前面的步骤中得到的信息。为了提高对目标位置的估计,可以通过测量当前时间步长的状态,在初始信念(或预测)中添加额外的信息。通过测量我们可以更新或修正目标的状态(即它的位置)。这种新的修正估计也称为后验估计。
也就是说我们的目标有一些隐藏状态(在这个例子中是位置),它将被标记为x。因为不确定这个状态(这就是它被隐藏的原因),所以可以对它进行估计,同时可以对状态Y进行一些测量,但测量总是有噪声的,这意味着它不是完美的,所以得到的时目标在哪里的一些分布,而不是精确的位置(如果测量是完美的,我们不需要任何估计,我们确切地知道物体在哪里)。
https://avoid.overfit.cn/post/1dd5dbffcf4c4308b11ef08dd2f38483

 浙公网安备 33010602011771号
浙公网安备 33010602011771号