机械臂7---机械臂逆运动学
机械臂逆运动学是指在已知工具坐标系相对于工作台坐标系的期望位置和姿态,如何计算一系列满足期望要求的关节角?该问题与机械臂正运动学互为逆问题。

为求出要求的关节角以放置相对于工作台坐标系{S}的工具坐标系{T},可将这个问题分为两部分:首先,进行坐标系变换求出相对于基坐标系{B}的腕部坐标系{W};然后应用逆运动学求关节角。
操作臂的逆运动学解法:

1.代数解法
按照机械臂正运动学知识,可以解出

由变换矩阵的含义可得到四个方程

进行合适的代数变换,可以求解出cos θ2.








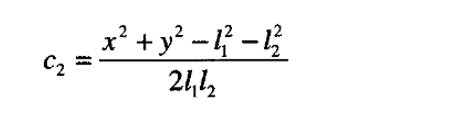
2.几何解法

对于实线表示的三角形,利用余弦定理求解θ2

化简将得到
为求解θ1,可先求出Bata。

再用余弦定理,求出ψ


平面内角度相加,可以求得θ3.

其它博文链接汇总:机械臂1----机械臂构型
机械臂2---机械臂的驱动方式
机械臂3-理论
机械臂4---刚体的描述
机械臂5---机械臂连杆及连杆链
机械臂6---机械臂正运动学
机械臂7---机械臂逆运动学
机械臂视频:机械臂视频 AR3 六轴机械臂
SCARA演示视频|PRR机构|RRR机构

 浙公网安备 33010602011771号
浙公网安备 33010602011771号