电机控制6---步进电机模型及控制(3)
三、步进电机的控制
步进电机的控制从控制形式上看,有开环控制和闭环控制。
- 开环控制
步进电机系统的主要特点是能实现精确位移、精确定位,且无积累误差。这是因为步进电机的运动受输入脉冲控制,其位移是断续的,总的位移量严格地等于输入的指令脉冲数或其平均转速严格正比于输入指令脉冲的频率;若能准确控制输入指令脉冲的数量或频率,就能够完成精确的位置或速度控制,无需步进电机反馈信号,形成所谓的开环控制系统。
在这种系统中,步进电机转轴的位置和转速与输入脉冲之间没有反馈联系,不能对转轴的旋转情况进行有效的监控,以致在某些场合下,由于转速和转角的波动,会破坏运动的稳定性,并且难以实现高速。最常见的失控现象是,当输入脉冲频率超过步进电机启动频率时,步进电机不能启动或失去同步。为了克服这个矛盾,在开环控制系统中, 必须采用升降频电路来控制输入频率的变化,使步进电机在升频的过程中启动,然后进入连续运转状态,在降频过程中实现制动和停止。

2.闭环控制

3.步进电机的速度控制
步进电机的速度与频率呈现正比关系。但是其频率的变化不能太快,否则将导致步进电机卡死。(即启动失败,同时伴随尖锐刺耳的声音。)因此,步进电机的速度控制需要用曲线式加减速。
有如下曲线式加减速方式:1.指数型加速 2.指数型减速 3.S型曲线加速 4.S型曲线减速 5.阶梯型加速 6.阶梯型减速
当加速达到目标值时,可以进入匀速控制阶段。
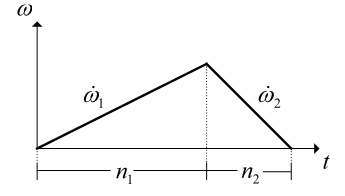
如下图是阶梯型加速曲线图。

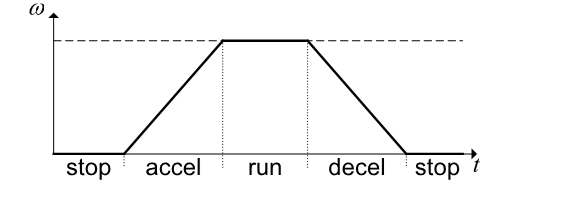
下图是一个完整的步进电机加减速曲线示意图。也可以在加速阶段和减速阶段交点处加入一段匀速运行阶段。 如下图:步进电机加减速及匀速运行曲线示意图

可以根据阶梯型曲线,得到对应控制步进电机的数学表达式,进而设计程序执行流程图。
加速阶段

减速阶段


程序执行流程可用如下坐标图表示:
定时中断状态机

4.代码

 浙公网安备 33010602011771号
浙公网安备 33010602011771号