
USB驱动分析
INIT函数:
这是内核模块的初始化函数,其所作的工作只有注册定义好的USB驱动结构体。
USB驱动结构体如下:
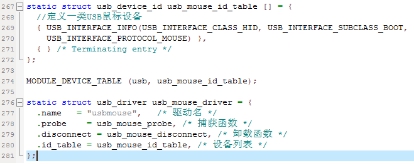
Usb_driver中的probe函数是驱动和设备匹配成功后调用。
Usb_driver中的disconnect函数是驱动和设备断开连接后后调用。
Id_table中是驱动能够支持的设备列表,usb_device_id中记载的就是支持的设备。其中USB_interface_info是用来定义一类USB鼠标设备。
MODULE_DEVICE_TABLE定义如下:
![]()

MODULE_DEVICE_TABLE的第一个参数是设备的类型,如果是USB设备,就是usb,后一个参数是设备表。
这条语句把支持设备数据添加到了/lib/module/内核名称/module.usbmap中,使模块装载程序知道什么模块对应什么硬件设备。
EXIT函数
![]()
唯一要做的就是注销usb_driver
Probe函数:
当设备匹配成功的时候,就需要调用prob函数:
probe的主要任务1为向输入子系统注册,需要的工作如下:(功能相关)
1.注册
2.告诉输入子系统需要支持哪些事件
probe的主要任务2为创建URB,那么他需要做好以下几点准备:(总线相关)
1.urb指针
2.要访问的设备
3.管道
4.host的数据缓冲区
5.回调函数
当然了,还有一大堆判断,比如判断是不是只有一个端点0(HID规范)等等。
static int usb_mouse_probe(struct usb_interface *intf, const struct usb_device_id *id)
{
//USB接口描述符被当做参数传递进来
/* 设备描述 usb_device */
struct usb_device *dev = interface_to_usbdev(intf);
/* 接口设置描述 */
struct usb_host_interface *interface;
/* 端点描述符 */
struct usb_endpoint_descriptor *endpoint;
struct usb_mouse *mouse;
struct input_dev *input_dev;
int pipe, maxp;
int error = -ENOMEM;
/* 获取当前接口设置 */
interface = intf->cur_altsetting;
/* 根据HID规范,鼠标只有一个端点(不包含0号控制端点)*/
//判断端点是否合法
if (interface->desc.bNumEndpoints != 1)
return -ENODEV;
/* 获取端点0描述符 */
endpoint = &interface->endpoint[0].desc;
/* 根据HID规范,鼠标唯一的端点应为中断端点 */
//还是在判断端点的类型是不是合法的,因为鼠标是中断控制的,所以端点应该是中断端点
if (!usb_endpoint_is_int_in(endpoint))
return -ENODEV;
/* 生成中断管道 */
//因为鼠标是中断控制,所以管道的类型应该是中断管道
pipe = usb_rcvintpipe(dev, endpoint->bEndpointAddress);
/* 返回该端点能够传输的最大的包长度,鼠标的返回的最大数据包为4个字节。*/
//初始化URB的时候会用到这个长度,缓冲区的长度要依照maxp来决定,最大不能超过8
maxp = usb_maxpacket(dev, pipe, usb_pipeout(pipe));
//为mouse结构申请内存
//mouse结构的主要作用是赋值给usb_interface中的一个属性
//以便于触发其它函数的时候通过usb_interface中的这个属性就可以知道相关信息
//usb_interface中的这个属性是专门为了储存用户需要的数据的
mouse = kzalloc(sizeof(struct usb_mouse), GFP_KERNEL);
/* 创建input设备 */
input_dev = input_allocate_device();
if (!mouse || !input_dev)
goto fail1;
/* 申请内存空间用于数据传输,data 为指向该空间的地址*/
//初始化URB需要的缓冲区,第四个参数是DMA相关
mouse->data = usb_buffer_alloc(dev, 8, GFP_ATOMIC, &mouse->data_dma);
if (!mouse->data)
goto fail1;
//////////////////////////////////
///////////////////////////////
//到这准备工作做完了,开始操作urb阶段
/* 分配URB */
mouse->irq = usb_alloc_urb(0, GFP_KERNEL);
if (!mouse->irq)
goto fail2;
//过程中顺便给mouse变量赋值
mouse->usbdev = dev;
mouse->dev = input_dev;
if (dev->manufacturer)
strlcpy(mouse->name, dev->manufacturer, sizeof(mouse->name));
if (dev->product) {
if (dev->manufacturer)
strlcat(mouse->name, " ", sizeof(mouse->name));
strlcat(mouse->name, dev->product, sizeof(mouse->name));
}
//给usb_mouse的name属性赋值
if (!strlen(mouse->name))
snprintf(mouse->name, sizeof(mouse->name),
"USB HIDBP Mouse %04x:%04x",
le16_to_cpu(dev->descriptor.idVendor),
le16_to_cpu(dev->descriptor.idProduct));
//这里不知道作用和用法
//usb_make_path用来获取USB设备在sysfs中的路径
usb_make_path(dev, mouse->phys, sizeof(mouse->phys));
//然后在给他添上一个名字
strlcat(mouse->phys, "/input0", sizeof(mouse->phys));
//字符设备初始化
input_dev->name = mouse->name;
input_dev->phys = mouse->phys;
//从dev中获取总线类型,设备id,厂商id,版本号
usb_to_input_id(dev, &input_dev->id);
input_dev->dev.parent = &intf->dev;
//设置这个输入设备所支持的信息
//支持相对坐标和事件
input_dev->evbit[0] = BIT_MASK(EV_KEY) | BIT_MASK(EV_REL);
//记录支持的按键值
input_dev->keybit[BIT_WORD(BTN_MOUSE)] = BIT_MASK(BTN_LEFT) |
BIT_MASK(BTN_RIGHT) | BIT_MASK(BTN_MIDDLE)| BIT_MASK(BTN_SIDE) |
BIT_MASK(BTN_EXTRA);
//支持的相对坐标为鼠标移动坐标和滚轮坐标
input_dev->relbit[0] = BIT_MASK(REL_X) | BIT_MASK(REL_Y) | BIT_MASK(REL_WHEEL);
//将mouse传入input_dev,因为open和close函数的传入参数就只有input_dev,而我们需要mouse
input_set_drvdata(input_dev, mouse);
//制定打开函数和关闭函数
input_dev->open = usb_mouse_open;
input_dev->close = usb_mouse_close;
/* 初始化中断URB */
//没有中断函数,因为我们都知道其实是主控制器在不断地轮询
//注意:mouse被设置到urb的上下文里,方便到时候调用。
usb_fill_int_urb(mouse->irq, dev, pipe, mouse->data,
(maxp > 8 ? 8 : maxp),
usb_mouse_irq, mouse, endpoint->bInterval);
//mouse的irq就是urb,下面应该是设置DMA传输相关
//当flag使用URB_NO_TRANSFER_DMA_MAP的时候,优先使用transfer_dma,而不是transfer_buffer
mouse->irq->transfer_dma = mouse->data_dma;
mouse->irq->transfer_flags |= URB_NO_TRANSFER_DMA_MAP;
//注册输入子系统
error = input_register_device(mouse->dev);
if (error)
goto fail3;
//将mouse传递给intf
usb_set_intfdata(intf, mouse);
return 0;
fail3:
usb_free_urb(mouse->irq);
fail2:
usb_buffer_free(dev, 8, mouse->data, mouse->data_dma);
fail1:
input_free_device(input_dev);
kfree(mouse);
return error;
}
PS : mouse类型如下:

Disconnect函数
当断开匹配的时候就会调用这个函数:
static void usb_mouse_disconnect(struct usb_interface *intf)
{
//从probe函数中,我们把mouse传递进了intf
struct usb_mouse *mouse = usb_get_intfdata (intf);
usb_set_intfdata(intf, NULL);
//把mouse中的属性逐个击破
if (mouse) {
usb_kill_urb(mouse->irq);
input_unregister_device(mouse->dev);
usb_free_urb(mouse->irq);
usb_buffer_free(interface_to_usbdev(intf), 8, mouse->data, mouse->data_dma);
kfree(mouse);
}
}
Open函数
当打开设备文件,就会调用open函数:

Urb实在这里提交的,保证了只有打开设备文件才会提交urb。
Close函数:
关闭设备文件的时候调用
static void usb_mouse_close(struct input_dev *dev)
{
//在probe函数中将mouse传入input_dev
struct usb_mouse *mouse = input_get_drvdata(dev);
usb_kill_urb(mouse->irq);
}
Usb_mouse_irq回调函数
回调函数,完成URB请求的操作会调用一次这个回调函数。
static void usb_mouse_irq(struct urb *urb)
{
struct usb_mouse *mouse = urb->context;
signed char *data = mouse->data;
struct input_dev *dev = mouse->dev;
int status;
//检查urb是否传输成功
switch (urb->status) {
case 0: /* success */
break;
case -ECONNRESET: /* unlink */
case -ENOENT:
case -ESHUTDOWN:
return;
/* -EPIPE: should clear the halt */
default: /* error */
goto resubmit;
}
//按这么看,data的第一个字节应该是代表按键,按下和抬起都会触发
input_report_key(dev, BTN_LEFT, data[0] & 0x01);
input_report_key(dev, BTN_RIGHT, data[0] & 0x02);
input_report_key(dev, BTN_MIDDLE, data[0] & 0x04);
input_report_key(dev, BTN_SIDE, data[0] & 0x08);
input_report_key(dev, BTN_EXTRA, data[0] & 0x10);
//第二个,第三个字节代表鼠标的x,y坐标,第四个字节是滑轮的当前值
input_report_rel(dev, REL_X, data[1]);
input_report_rel(dev, REL_Y, data[2]);
input_report_rel(dev, REL_WHEEL, data[3]);
input_sync(dev);
resubmit:
status = usb_submit_urb (urb, GFP_ATOMIC);
if (status)
err ("can't resubmit intr, %s-%s/input0, status %d",
mouse->usbdev->bus->bus_name,
mouse->usbdev->devpath, status);
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号