移植mavlink到stm32详细教程,后面附快速移植方法
一:准备材料: mavlink源码 stm32串口程序
1.mavlink源码:

b.下拉到MAVLink Code and Generator点击MAVLink Generator (C/C++, Python)下载源码生成器

c.解压缩下载的文件,点击mavgenerate.py这个文件(前提是已经安装好了python软件)

d.xml是生成的源文件,out是生成的目录 langguage是生成的代码语言。
xml:mavlink-master/message_definitions/v1.0/common.xml
out:D:/Backup/桌面/mav
langguage:C
protocol:1.0
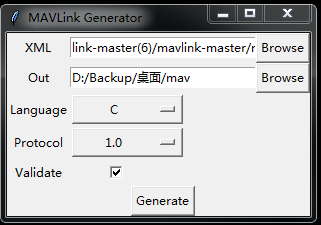
点击generate就能生成相应的文件到out目录里去

2.stm32串口代码选用正点原子的串口代码,将生成的文件新建一个MAVLINK文件夹添加到工程里去(添加文件,添加头文件)


其中manlink_avoid_errors.h是我自己添加的用来解决报错的文件,尽量将更改添加到这个文件,方便以后移植
二:准备移植
将准备好的工程编译,会出现一堆错误("..\OBJ\USART.axf" - 30 Error(s), 17 Warning(s).),别急,一个一个解决就好了
错误1:..\MAVLINK\common\../mavlink_types.h(53): error: #20: identifier "pack" is undefined
解决方法:这个错误是因为对齐方式的原因,因为gun编译跟mdk有些差异,具体我没有深究。
屏蔽mavlink_types.h中的如下代码
// Macro to define packed structures//#ifdef __GNUC__// #define MAVPACKED( __Declaration__ ) __Declaration__ __attribute__((packed))//#else// #define MAVPACKED( __Declaration__ ) __pragma( pack(push, 1) ) __Declaration__ __pragma( pack(pop) )//#endif
在 mavlink_avoid_errors.h中加入如下代码(意思就是让MAVPACKED不起任何作用)
#define MAVPACKED( __Declaration__ ) __Declaration__
编译后:"..\OBJ\USART.axf" - 30 Error(s), 7 Warning(s).
错误2:..\MAVLINK\common\../mavlink_types.h(53): error: #3092: anonymous unions are only supported in --gnu mode, or when enabled with #pragma anon_unions
解决方法:根据错误提示在mavlink_avoid_errors.h中添加如下代码
#pragma anon_unions
编译后:"..\OBJ\USART.axf" - 30 Error(s), 8 Warning(s).
错误3:..\MAVLINK\common\../checksum.h(34): warning: #260-D: explicit type is missing ("int" assumed)
解决方法:包括后面很多错误都有共同点,指向有inline的行,这里是因为mdk中无法识别inline,重新定义inline就好
在mavlink_avoid_errors.h中加入如下代码(因为mdk认识__INLINE)
#defineinline __INLINE
编译后:"..\OBJ\USART.axf" - 4 Error(s), 195 Warning(s).
错误4:..\MAVLINK\common\../mavlink_conversions.h(167): error: #268: declaration may not appear after executable statement in block
解决方法:这个错误是因为将参数定义到了函数后面了。
更改mavlink_conversions.h中的代码为
MAVLINK_HELPER void mavlink_dcm_to_quaternion(constfloat dcm[3][3],float quaternion[4]){int dcm_j,dcm_k;float s;float tr = dcm[0][0]+ dcm[1][1]+ dcm[2][2];if(tr >0.0f){float s = sqrtf(tr +1.0f);quaternion[0]= s *0.5f;s =0.5f/ s;quaternion[1]=(dcm[2][1]- dcm[1][2])* s;quaternion[2]=(dcm[0][2]- dcm[2][0])* s;quaternion[3]=(dcm[1][0]- dcm[0][1])* s;}else{/* Find maximum diagonal element in dcm* store index in dcm_i */int dcm_i =0;int i;for(i =1; i <3; i++){if(dcm[i][i]> dcm[dcm_i][dcm_i]){dcm_i = i;}}dcm_j =(dcm_i +1)%3;dcm_k =(dcm_i +2)%3;s = sqrtf((dcm[dcm_i][dcm_i]- dcm[dcm_j][dcm_j]-dcm[dcm_k][dcm_k])+1.0f);quaternion[dcm_i +1]= s *0.5f;s =0.5f/ s;quaternion[dcm_j +1]=(dcm[dcm_i][dcm_j]+ dcm[dcm_j][dcm_i])* s;quaternion[dcm_k +1]=(dcm[dcm_k][dcm_i]+ dcm[dcm_i][dcm_k])* s;quaternion[0]=(dcm[dcm_k][dcm_j]- dcm[dcm_j][dcm_k])* s;}}
更改mavlink_helpers.h中的代码为
MAVLINK_HELPER uint16_t mavlink_msg_to_send_buffer(uint8_t*buffer,constmavlink_message_t*msg){uint8_t*ck;memcpy(buffer,(constuint8_t*)&msg->magic, MAVLINK_NUM_HEADER_BYTES +(uint16_t)msg->len);ck = buffer +(MAVLINK_NUM_HEADER_BYTES +(uint16_t)msg->len);ck[0]=(uint8_t)(msg->checksum &0xFF);ck[1]=(uint8_t)(msg->checksum >>8);return MAVLINK_NUM_NON_PAYLOAD_BYTES +(uint16_t)msg->len;}
编译后:"..\OBJ\USART.axf" - 0 Error(s), 195 Warning(s).
警告:..\MAVLINK\common\./mavlink_msg_heartbeat.h(261): warning: #191-D: type qualifier is meaningless on cast type
解决方法:按照提示跟踪错误到protocol.h,
更改protocol.h的代码为(就是去掉了const)
#define_MAV_RETURN_int8_t(msg, wire_offset)(int8_t)_MAV_PAYLOAD(msg)[wire_offset]#define_MAV_RETURN_uint8_t(msg, wire_offset)(uint8_t)_MAV_PAYLOAD(msg)[wire_offset]
编译后:"..\OBJ\USART.axf" - 0 Error(s), 0 Warning(s).
到此不代表移植好了,上面是本人边移植边写的教程,如下给大家做一个总结。可能很多东西跟上面重复的,如果大家想尽快的移植好可以参考下面的,如果你想了解为什么这么移植请参考上 面的移植过程。
三:不需要懂过程的快速移植,只需做好这几步就能快速移植了
1.准备好工程变添加好生成的mavlink纯净文件(未经任何修改的文件)
2.添加我写好的mavlink_avoid_errors.h文件,代码如下
/** @file mavlink_avoid_errors.h* @简介:本文件是由624668529添加,用来统一解决mavlink报错信息* @see QQ624668529*/#ifndef MAVLINK_AVOID_ERRORS_H#define MAVLINK_AVOID_ERRORS_H/*解决..\MAVLINK\common\../mavlink_types.h(53): error: #20: identifier "pack" is undefined*/#define MAVPACKED( __Declaration__ ) __Declaration__/*解决..\MAVLINK\common\../mavlink_types.h(53): error: #3092: anonymous unions are only supported in --gnu mode, or when enabled with #pragma anon_unions*/#pragma anon_unions#defineinline __INLINE#ifndef memset//由624668529添加 2018-08-24staticinlinevoid*memset(void*dest,int data,size_t length){uint32_t i;int*point = dest;for(i=0; i<length; i++) point[i]= data;return dest;}#endif#ifndef memcpy//由624668529添加 2018-08-24void*memcpy(void*dest,constvoid*src,size_t n){unsignedchar*pout =(unsignedchar*)dest;unsignedchar*pin =(unsignedchar*)src;while(n-->0)*pout++=*pin++;return dest;}#include"mavlink_types.h"#define MAVLINK_USE_CONVENIENCE_FUNCTIONS#define MAVLINK_SEPARATE_HELPERS//mavlink_system_t mavlink_system = {0,0};mavlink_system_t mavlink_system ={1,1};// System ID, 1-255, Component/Subsystem ID, 1-255void comm_send_ch(mavlink_channel_t chan,uint8_t buf){chan=chan;USART_SendData(USART1, buf);//向串口1发送数据while(USART_GetFlagStatus(USART1,USART_FLAG_TC)!=SET);//等待发送结束}#endif#include"mavlink.h"#include"mavlink_helpers.h"#endif//AVLINK_AVOID_ERRORS_H
3.在main.c中更改成如下代码
#include"sys.h"#include"delay.h"#include"usart.h"#include"led.h"#include"beep.h"#include"key.h"#include"mavlink_avoid_errors.h"//ALIENTEK 探索者STM32F407开发板 实验4//串口通信实验 -库函数版本//技术支持:www.openedv.com//淘宝店铺:http://eboard.taobao.com//广州市星翼电子科技有限公司//作者:正点原子 @ALIENTEKint main(void){mavlink_heartbeat_t packet_in ={963497464,17,84,151,218,3};mavlink_heartbeat_t packet1;memset(&packet1,0,sizeof(packet1));packet1.custom_mode = packet_in.custom_mode;packet1.type = packet_in.type;packet1.autopilot = packet_in.autopilot;packet1.base_mode = packet_in.base_mode;packet1.system_status = packet_in.system_status;packet1.mavlink_version = packet_in.mavlink_version;NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置系统中断优先级分组2delay_init(168);//延时初始化uart_init(115200);//串口初始化波特率为115200LED_Init();//初始化与LED连接的硬件接口while(1){mavlink_msg_heartbeat_send(MAVLINK_COMM_1 , packet1.type , packet1.autopilot , packet1.base_mode , packet1.custom_mode , packet1.system_status );delay_ms(1000);}}
4将mavlink_conversions.h更改这一部分代码为
MAVLINK_HELPER void mavlink_dcm_to_quaternion(constfloat dcm[3][3],float quaternion[4]){int dcm_j,dcm_k;float s;float tr = dcm[0][0]+ dcm[1][1]+ dcm[2][2];if(tr >0.0f){float s = sqrtf(tr +1.0f);quaternion[0]= s *0.5f;s =0.5f/ s;quaternion[1]=(dcm[2][1]- dcm[1][2])* s;quaternion[2]=(dcm[0][2]- dcm[2][0])* s;quaternion[3]=(dcm[1][0]- dcm[0][1])* s;}else{/* Find maximum diagonal element in dcm* store index in dcm_i */int dcm_i =0;int i;for(i =1; i <3; i++){if(dcm[i][i]> dcm[dcm_i][dcm_i]){dcm_i = i;}}dcm_j =(dcm_i +1)%3;dcm_k =(dcm_i +2)%3;s = sqrtf((dcm[dcm_i][dcm_i]- dcm[dcm_j][dcm_j]-dcm[dcm_k][dcm_k])+1.0f);quaternion[dcm_i +1]= s *0.5f;s =0.5f/ s;quaternion[dcm_j +1]=(dcm[dcm_i][dcm_j]+ dcm[dcm_j][dcm_i])* s;quaternion[dcm_k +1]=(dcm[dcm_k][dcm_i]+ dcm[dcm_i][dcm_k])* s;quaternion[0]=(dcm[dcm_k][dcm_j]- dcm[dcm_j][dcm_k])* s;}}
5.将mavlink_helpers.h中更改这一部分代码为
MAVLINK_HELPER uint16_t mavlink_msg_to_send_buffer(uint8_t*buffer,constmavlink_message_t*msg){uint8_t*ck;memcpy(buffer,(constuint8_t*)&msg->magic, MAVLINK_NUM_HEADER_BYTES +(uint16_t)msg->len);ck = buffer +(MAVLINK_NUM_HEADER_BYTES +(uint16_t)msg->len);ck[0]=(uint8_t)(msg->checksum &0xFF);ck[1]=(uint8_t)(msg->checksum >>8);return MAVLINK_NUM_NON_PAYLOAD_BYTES +(uint16_t)msg->len;}
6.屏蔽mavlink_types.h中这一部分代码
// Macro to define packed structures//#ifdef __GNUC__// #define MAVPACKED( __Declaration__ ) __Declaration__ __attribute__((packed))//#else// #define MAVPACKED( __Declaration__ ) __pragma( pack(push, 1) ) __Declaration__ __pragma( pack(pop) )//#endif
7.更改protocol.h中的代码为(即去掉const)解决警告的方法
#define_MAV_RETURN_int8_t(msg, wire_offset)(int8_t)_MAV_PAYLOAD(msg)[wire_offset]#define_MAV_RETURN_uint8_t(msg, wire_offset)(uint8_t)_MAV_PAYLOAD(msg)[wire_offset]
编译后:"..\OBJ\USART.axf" - 0 Error(s), 0 Warning(s).
四:下载到开发板打开串口调试助手
成功接收到数据,如图,表示移植成功


移植成功。
作者:恒久力行 QQ:624668529
本次进添加了串口发送函数,以后若有需要我会继续添加串口接收函数。
分享教程,只希望中国的科学技术突飞猛进过,望早日超越其他国家。加油中国人
希望我的分享对你有一定的帮助,希望每一个中国人都能发愤图强,为国家的科技事业做出自己的贡献。同时祝愿中国的科学技术水平越来越高,相信我国会越来越强大。加油,每一个中国人

 浙公网安备 33010602011771号
浙公网安备 33010602011771号