
图像的2D几何变换
基本概念
齐次坐标
使用 N+1 维坐标来表示 N 维坐标,例如在 2D 笛卡尔坐标系中加上额外变量 w 来形成 2D 齐次坐标系 。这样做的好处是,在齐次坐标下,图像的几何变换可以利用矩阵的线性变换来表示。
齐次坐标具有规模不变性,同一点可以被无数个齐次坐标表达: 齐次坐标转化为笛卡尔坐标可以通过同除最后一项得到。
自由度(Degree of freedom,DOF)是指变换矩阵中变量的个数,代表着可以自由变换的维度。
基础变换
平移(translation)
旋转和反射(rotation & reflection)
旋转
反射
旋转矩阵和反射矩阵有如下特性;
- 旋转矩阵和反射矩阵都是正交矩阵
- 旋转矩阵的行列式值为 +1,反射矩阵的行列值为 -1
- 旋转矩阵 R(θ) 的逆矩阵为 R(-θ),反射矩阵的逆矩阵为其本身
- 旋转矩阵和反射矩阵可以相互转换(注意下面的公式可以看出,旋转可以分解为两次反射来得到,但是反射不能直接通过旋转来得到)
缩放(scaling)
各向同性缩放(isotropic scaling):x,y方向缩放倍数相同
广义缩放(scaling):x,y 方向缩放倍数可以不同
错切(shearing)
错切可以把图形沿着水平或/和垂直方向上进行推移/伸缩,从而可以让一个矩形变成平行四边形。其公式如下
如果 则只有垂直方向拉伸,叫作垂直错切;如果 则只有水平方向拉伸,叫作水平错切
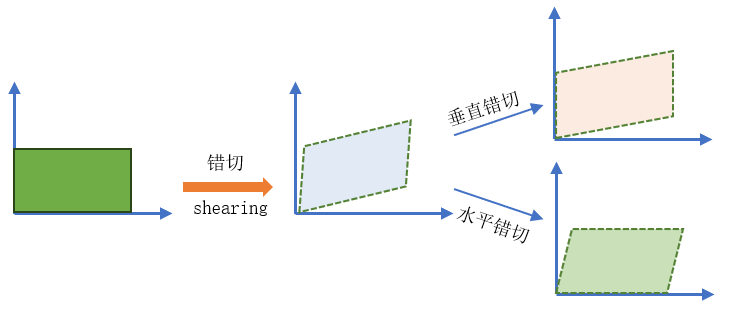
任何错切矩阵的行列式均为 1,即错切是一个面积(3d 中是体积)保持不变的变换 (area/volume-perserving transformation)
复合变换

复合变换可以分解为多个基础变换的叠加,在表达式上体现为变换矩阵的相乘。需要注意的是,正如矩阵相乘不能随意交换矩阵次序一样,相同的基础变换在不同的执行次序下也会产生不同的复合变换结果。
刚体变换 (rigid transformation)
也叫欧几里得变换(Euclidean transformation)

- 包括旋转变换(rotation)、平移变换(translation)、反射/镜像变换 (Reflection ) 及其组合
- 3 个自由度:1 个旋转角度 和 2 个平移距离 (这里假设不包括反射,仅包括旋转和平移)
- 特点
- 保持线段长度、夹角不变(所以可以保持图形的尺寸和形状不变)
- 表达式
其中, ;正交矩阵 表征了旋转和反射的影响,如果只有旋转,且旋转角度为 (根据单位圆中角度定义逆时针为正,下同),则 ,如果只有反射,且对称轴的角度为 , ;
列向量 表征了旋转的影响; 为 0 的二维列向量,其转置为二维行向量。
关于刚体变换是否包含反射的问题?wiki
从刚体变换的直观定义上(保持形状和尺寸不变)来说,刚体变换应该是包括反射的。但是在一些更严格的定义中,会同时要求刚体变换在欧式空间保持 handedness,此时会把反射排除在外,因为反射是镜像变换,会把左手位和右手位颠倒。这种不包括反射的刚体变换定义也叫作 proper rigid transformation、rototranslation,而包括反射的刚体变换叫作 improper rigid transformation。
proper rigid transformation 可以分解为 rotation + translation;improper rigid transformation 可以分解为 improper rotation + translation 或者 一系列反射。(improper rotation 也叫 rotation-reflection, rotoreflection, rotary reflection,指的是“沿着某个轴的旋转 + 在垂直这个轴的平面内的反射”)
简单来说,刚体变换是否包括反射需要看具体场合。另外,如果包含了反射,那么刚体变换的自由度应该有 4 个,即旋转角度、反射对称轴的角度、x 方向平移量和 y 方向平移量。
相似变换 (similarity transformation)
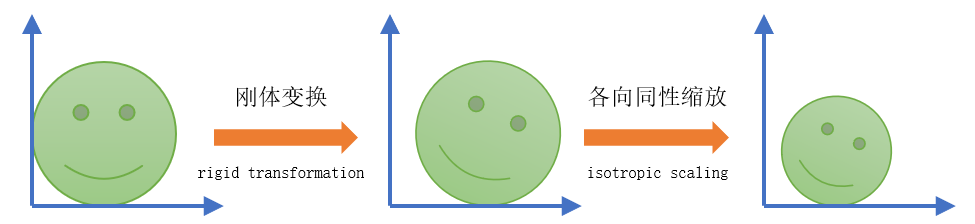
- 相比刚体变换增加了各向同性缩放变换(isotropic scaling)
- 4 个自由度,比刚体变换多了一个缩放因子
- 特点
- 保角性:保持角度不变
- 保持距离比:保持线段之间长度的比值不变
- 表达式
为缩放尺度,标量。
仿射变换 (affine transformation)
- 仿射变换是在相似变换的基础上多了错切变换&广义缩放。相似变换具有单一旋转因子和单一缩放因子,仿射变换具有两个旋转因子和两个缩放因子。
- 6 个自由度:比相似变换多一个旋转因子,一个缩放因子
- 特点
- 平直性:图像经过仿射变换后,直线仍然是直线
- 平行性:图像在完成仿射变换后,平行线仍然是平行线。
- 直线上各点比例保持不变(如中点仍是中点)
- 表达式
A 为 2×2 的非奇异矩阵,可被分解为如下:
其中 为旋转矩阵,D 为对角阵
可以看做两个方向的缩放比。
投影变换 (projective transformation)
也叫作透视变换(perspective transformation)、单应性变换(homography )、直射变换(collineation)

- 投影变换将图像投影到一个新的视平面,是二维到三维再到另一个二维 (x', y') 空间的映射
- 投影变换是齐次坐标下非奇异的线性变换,即可以用矩阵运算 来表示,其中 为非奇异矩阵。需要注意的是,在非齐次坐标系下,投影变换是非线性的。
- 8 个自由度,比仿射变换多 2 个自由度
- 特点
- 保持三点共线
- 表达式:
其中 ; 标量常数,一般可设置为 1.
Tips
- 投影变换有 8 个自由度,其变换矩阵的计算最少需要 4 对配对点
- 当投影变换矩阵的最后一行为(0,0,1)时,变换就为仿射变换,在仿射的前提下,当左上角 2×2 矩阵正交时为欧式变换,左上角矩阵行列式为 1 时为定向欧式变换。所以射影变换包含仿射变换,而仿射变换包含欧式变换。
- 投影变换的特点是可以实现透射效果,即满足近大远小的视觉特征。
- 一些常见变换

Reference
- 基本图像变换:线性变换,仿射变换,投影变换_andylei777的博客-CSDN博客
- 四元数和旋转(Quaternion & rotation) - 知乎
- 彻底搞懂“旋转矩阵/欧拉角/四元数”,让你体会三维旋转之美_欧拉角判断动作_肥肥胖胖是太阳的博客-CSDN博客
- 【多视角立体视觉系列】 几何变换的层次——投影变换,仿射变换,度量变换和欧几里德变换 - 知乎
- Geometric Transformations — nVision User Guide 2016.3 documentation
- 图片的仿射,投影(透视)变换
- 【Computer Vision】图像单应性变换/投影/仿射/透视 - VincentCheng - 博客园
- 一文读懂图像中点的坐标变换(刚体变换,相似变换,仿射变换,投影变换)_刚体变换和仿射变换_Lavi_qq_2910138025的博客-CSDN博客
- 计算机图形学学习笔记(五):二维图形变换 - 知乎
- 图形学中的基本变换(Basic Transforms)
- 旋转和反射_什么是反射矩阵_Justin__Ko的博客-CSDN博客
- Affine transformation - Wikipedia



【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步