
ROS中使用Hokuyo激光雷达UST-10LX
Hokuyo激光雷达UST-10LX:
1.首先下载相关节点包
如果用的是采用以太网接口UST-10LX,需要下载urg_node的包,
$ sudo apt-get install ros-kinetic-urg-node2.修改Ubuntu的IP地址
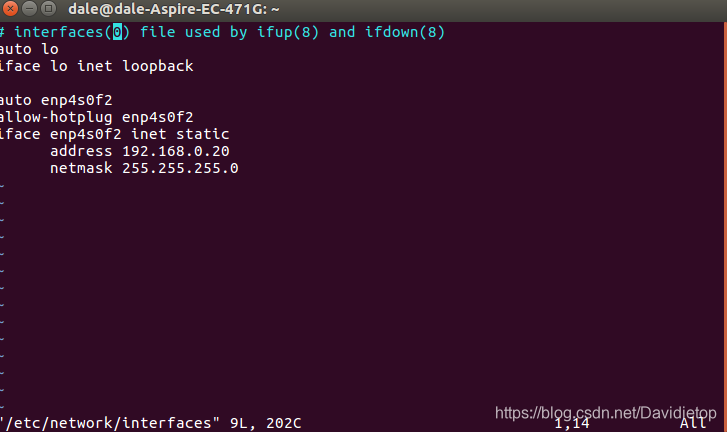
编辑/etc/network/interfaces,添加一个静态的IP地址。
$ sudo gedit /etc/network/interfacesauto lo
iface lo inet loopback
下面添加以下语句:
auto +自己网卡号(自己网卡号用ifconfig查看)
allow-hotplug +自己网卡号
iface +自己网卡号 inet static
address 192.168.0.20
netmask 255.255.255.0特别注意,修改后只能重启电脑生效,重启网关无效修改(亲测)
urg_node包launch文件需要配置,具体参照urg_lidar.launch文件:例如, <param name="ip_address" value="192.168.0.10"/>, <param name="frame_id" value="hokuyo_link"/>
因为Hokuyo激光雷达的固定IP地址是“192.168.1.10”(出厂设置是“192.168.0.10”),我们的激光雷达未修改ip,出厂设置是“192.168.0.10”
所以在Ubuntu上添加IP地址时,使用“192.168.0.XX”,最后两个数字应该和“10区分”,前面三段和激光雷达的IP一样。
将激光雷达连在电脑上,确认连接:
ping 192.168.0.10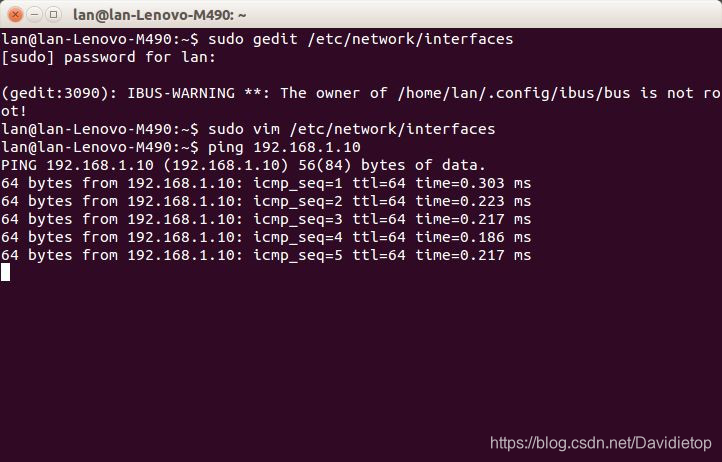
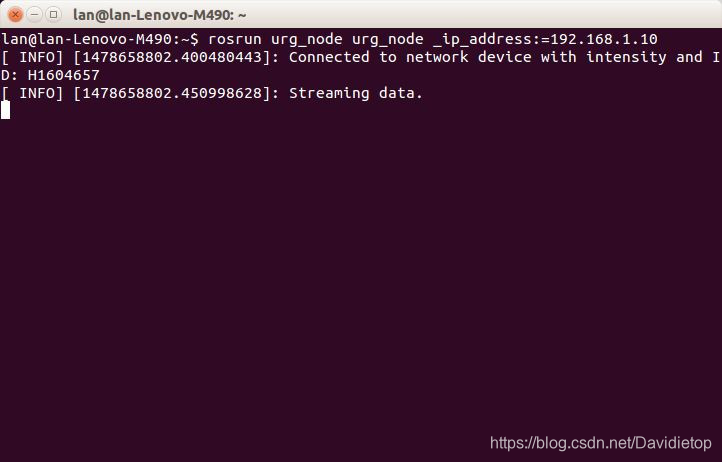
3.确认激光雷达已经通电并连接在电脑上后,获取激光雷达数据:
$ roscore
$ rosrun urg_node urg_node _ip_address:=192.168.0.10如果激光雷达是通过USB连接的,Ubuntu会自动识别并连接。
4.查看激光雷达检测到的数据
$ rostopic echo /scan可以看到数据跳动的很快
5.查看激光雷达扫描的消息类型和消息结构
$ rostopic type /scan
$ rosmsg show sensor_msgs/LaserScan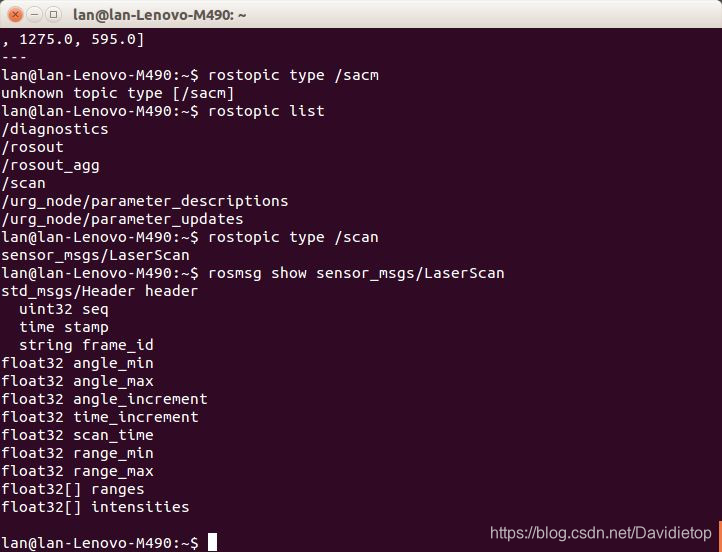
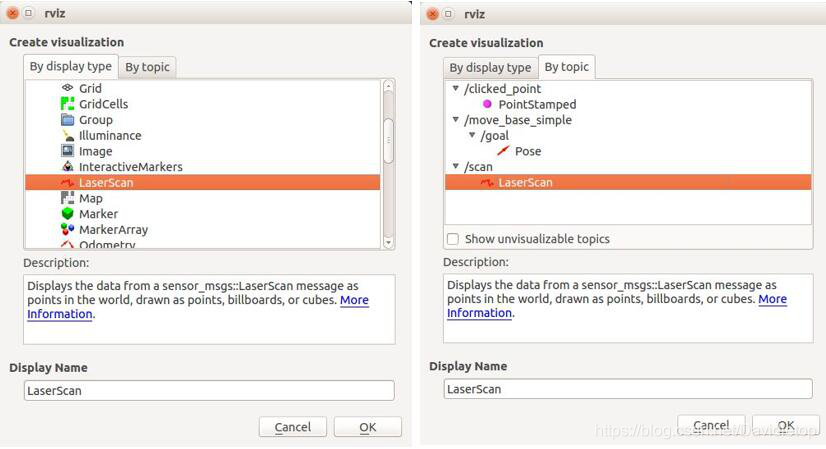
6.在rviz中查看激光数据:
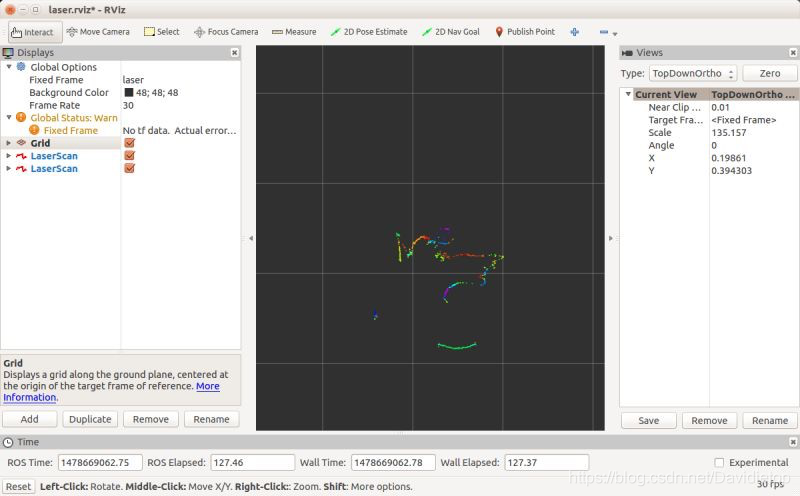
$ rosrun rviz rviz在Add中依次添加LaserScan和话题/scan下的LaserScan。
注意把Global options 的Fixed Frame 改为laser


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 基于Microsoft.Extensions.AI核心库实现RAG应用
· Linux系列:如何用heaptrack跟踪.NET程序的非托管内存泄露
· 开发者必知的日志记录最佳实践
· SQL Server 2025 AI相关能力初探
· Linux系列:如何用 C#调用 C方法造成内存泄露
· 震惊!C++程序真的从main开始吗?99%的程序员都答错了
· 别再用vector<bool>了!Google高级工程师:这可能是STL最大的设计失误
· 单元测试从入门到精通
· 【硬核科普】Trae如何「偷看」你的代码?零基础破解AI编程运行原理
· 上周热点回顾(3.3-3.9)