
catkin_make还是cmake?
关于使用catkin_make还是cmake,其实效果是不一样的,共性是把依赖什么的都建立起来,并且依据CMakeList编译文件。另外,前者使用了ROS系统,后者没有涉及。
首先介绍catkin_make的使用方法:
创建一个文件夹,里面建立一个src,之后
catkin_create_pkg example std_msgs rospy roscppexample是创建的文件夹名字,后面依次是消息传递、python、c++三个依赖。这一步操作将会创建package.xml and a CMakeLists.txt文件。
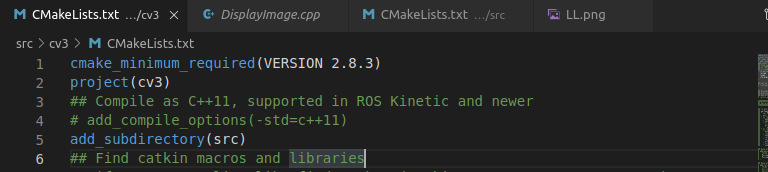
之后再在src里面编写你的程序,如Opencv教程里面的一个显示图像程序,以及编写一个CMakeLists.txt文件(见链接https://docs.opencv.org/3.4.7/db/df5/tutorial_linux_gcc_cmake.html)。注意上一层CMakeLists.txt里面加入add_subdirectory(src)
这样编译才能连锁作用。
然后返回最早创建的那个文件层
catkin_make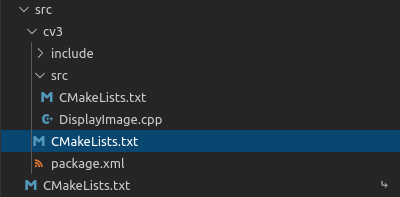
第一个自己和第二个是用一个就好创建,第三个是catkin_make创建。
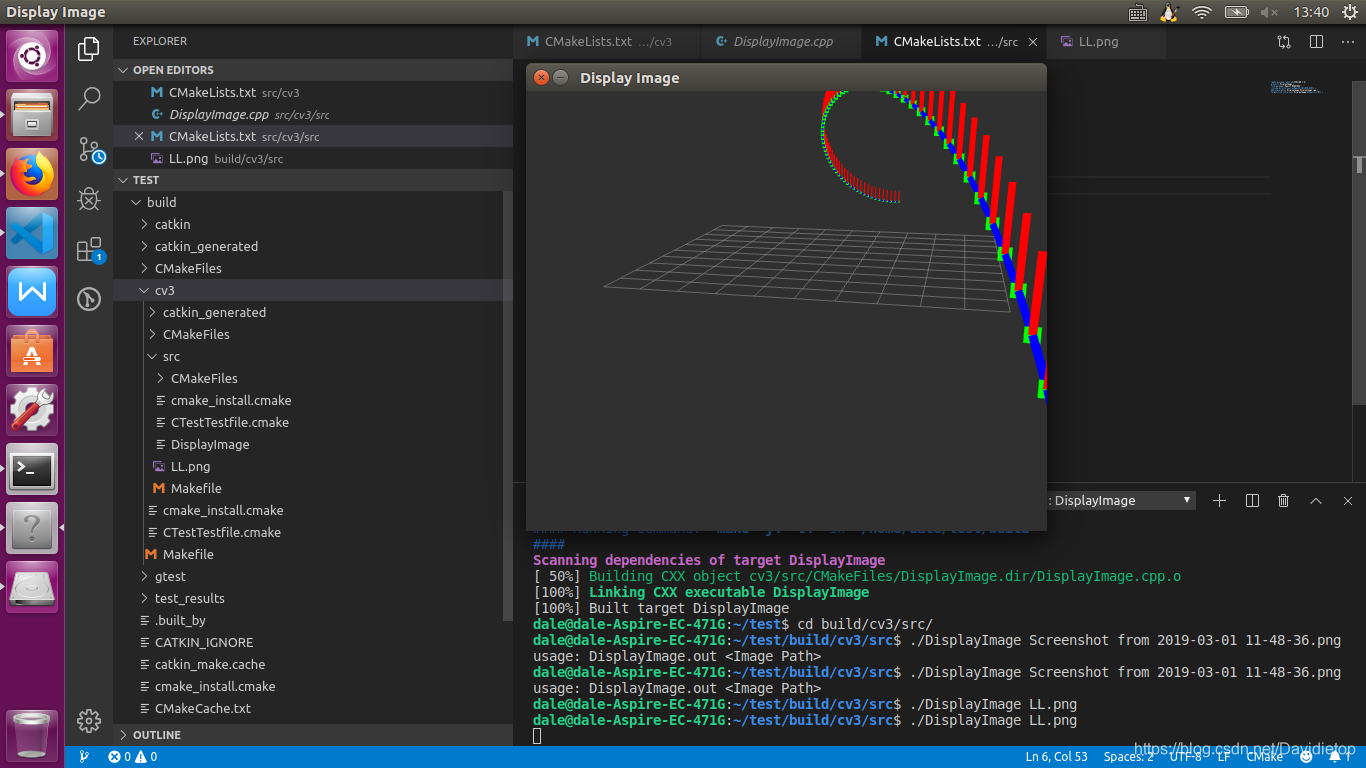
之后你会问你编译出来的文件去哪了?就是add_executable创建的文件。其实这个文件在build里面(见倒数第三个)

测试运行:
参考:http://wiki.ros.org/ROS/Tutorials/CreatingPackage
然后介绍一下cmake的使用:
创建一个文件夹,里面建立一个src和CMakeList.txt以及build,这个CMakeList可以这样写:
cmake_minimum_required(VERSION 2.8)
project( test )
set (EXECUTABLE_OUTPUT_PATH "${CMAKE_CURRENT_SOURCE_DIR}")
add_subdirectory(src)第三句set (EXECUTABLE_OUTPUT_PATH "${CMAKE_CURRENT_SOURCE_DIR}")的意思是在第一个CMakeLists目录下创建编译文件。
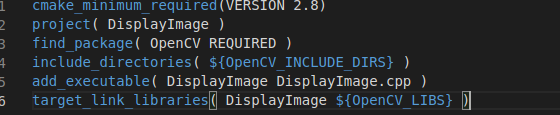
然后再在src里面编写你的程序,如Opencv教程里面的一个显示图像程序,以及编写一个CMakeLists.txt文件(见链接https://docs.opencv.org/3.4.7/db/df5/tutorial_linux_gcc_cmake.html)。
之后
cd ..
cd build
cmake ..
make
cd ..
效果不同,如果使用ros的话,需要用catkin_make创建文件夹,不用ros的话推荐用cmake,没有那么多指令、文件的创建。


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 基于Microsoft.Extensions.AI核心库实现RAG应用
· Linux系列:如何用heaptrack跟踪.NET程序的非托管内存泄露
· 开发者必知的日志记录最佳实践
· SQL Server 2025 AI相关能力初探
· Linux系列:如何用 C#调用 C方法造成内存泄露
· 震惊!C++程序真的从main开始吗?99%的程序员都答错了
· 别再用vector<bool>了!Google高级工程师:这可能是STL最大的设计失误
· 单元测试从入门到精通
· 【硬核科普】Trae如何「偷看」你的代码?零基础破解AI编程运行原理
· 上周热点回顾(3.3-3.9)