
通俗理解齐次变换矩阵复合变换的时候变换顺序不可逆——下
为防止文章过长乏味,将此博客分为上下两篇。下篇是对上篇例题的例题常规求解和线性代数的解释。
常规求解
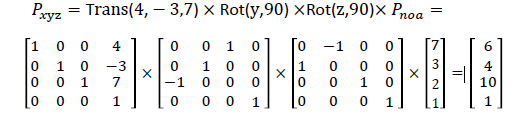
固连在坐标系(𝑛,𝑜,𝑎)上的点P(7,3,2)T 经历如下变换,求出变换后该点相对于固定参考坐标系的坐标。
(1)绕z轴旋转90°;
(2)接着绕y轴旋转90°;
(3)接着再平移[4,-3,7];
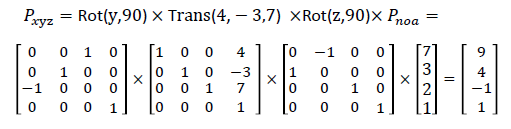
倒转一下(2)和(3)的顺序
(1)绕z轴旋转90°;
(2)接着再平移[4,-3,7];
(3)接着绕y轴旋转90°;
对比不同顺序的同一个步骤而言,直接看图我觉得有点抽象。大家可用自己的手臂一次平移一次旋转摆弄一下。

|

|
线性代数的解释
- 矩阵的行数和列数不允许相乘,上一个矩阵的列数不等于下一个矩阵的行数。
如3x2的A和2x5的B可以相乘,但是BA这样的乘法是不允许的、没有定义的。 - 即使转换乘法顺序后,上一个矩阵的列数仍等于下一个矩阵的行数,得到的结果也可能不相等。
A = [ − 2 4 1 − 2 ] \pmb{A}=\begin{bmatrix} -2 & 4 \\ 1 & -2\\ \end{bmatrix} AAA=[−214−2]
B = [ 2 4 − 3 − 6 ] \pmb{B}=\begin{bmatrix} 2 & 4 \\ -3 & -6\\ \end{bmatrix} BBB=[2−34−6]
A B = [ − 2 4 1 − 2 ] [ 2 4 − 3 − 6 ] = [ − 16 − 32 8 16 ] \pmb{AB}=\begin{bmatrix} -2 & 4 \\ 1 & -2\\ \end{bmatrix}\begin{bmatrix} 2 & 4 \\ -3 & -6\\ \end{bmatrix}=\begin{bmatrix} -16 & -32 \\ 8 & 16\\ \end{bmatrix} ABABAB=[−214−2][2−34−6]=[−168−3216]
B A = [ 2 4 − 3 − 6 ] [ − 2 4 1 − 2 ] = [ 0 0 0 0 ] \pmb{BA}=\begin{bmatrix} 2 & 4 \\ -3 & -6\\ \end{bmatrix}\begin{bmatrix} -2 & 4 \\ 1 & -2\\ \end{bmatrix}=\begin{bmatrix} 0 & 0 \\ 0 & 0\\ \end{bmatrix} BABABA=[2−34−6][−214−2]=[0000]
A B ≠ B A \pmb{AB}\neq \pmb{BA} ABABAB=BABABA
参考资料
同济大学数学系,工程线性代数第六版
通俗理解齐次变换矩阵复合变换的时候变换顺序不可逆——上
通俗理解齐次变换矩阵复合变换的时候变换顺序不可逆——下


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 基于Microsoft.Extensions.AI核心库实现RAG应用
· Linux系列:如何用heaptrack跟踪.NET程序的非托管内存泄露
· 开发者必知的日志记录最佳实践
· SQL Server 2025 AI相关能力初探
· Linux系列:如何用 C#调用 C方法造成内存泄露
· 震惊!C++程序真的从main开始吗?99%的程序员都答错了
· 别再用vector<bool>了!Google高级工程师:这可能是STL最大的设计失误
· 单元测试从入门到精通
· 【硬核科普】Trae如何「偷看」你的代码?零基础破解AI编程运行原理
· 上周热点回顾(3.3-3.9)