
软件操作手册:
测试原理说明:
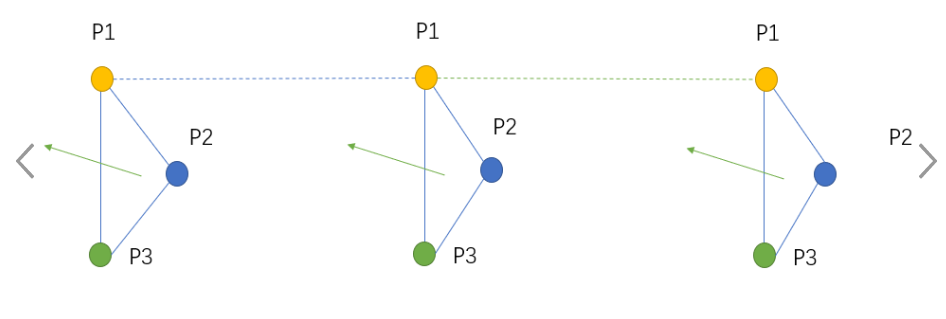
手臂编写一组增量程序,并记录三个点 P1 P2 P3 的坐标
以记录N个点为例,则记录的数据如下:
1: x y z (P1)
2: x y z (P1)
n... (P1)
n+1: x y z (P2)
n+2: x y z (P2)
2n... (P2
2n+1: x y z (P3)
2n+2: x y z (P3)
3n... (P3)
计算数据:
由于三个点可以确定一个平面,所以想要知道姿态的变动,可以使用平面的方向两进行表达
得到每个平面的法向量,然后求法向量与xyz轴之间的夹角变动量来评估姿态的变动。
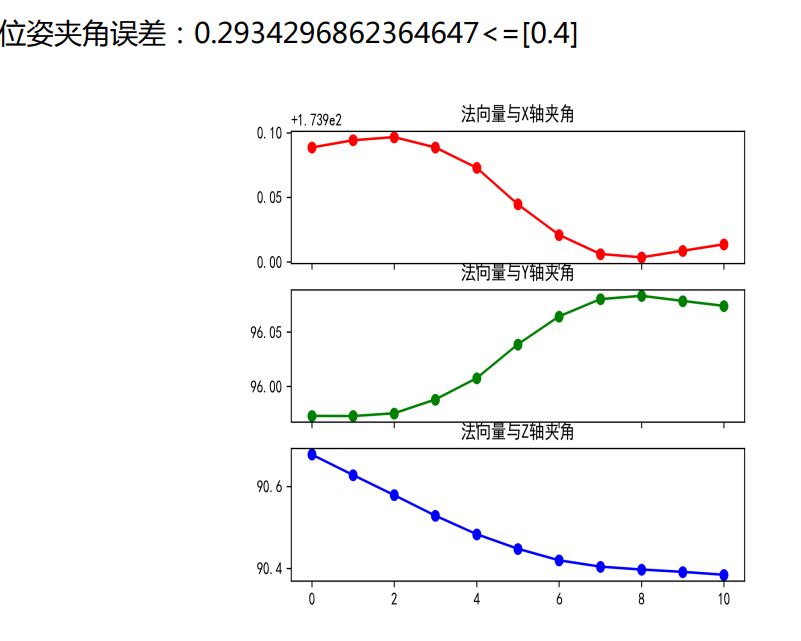
因此可以实现将姿态的变化量数据可视化,另外软件一并提供一些直线的精度估测。
软件操作说明
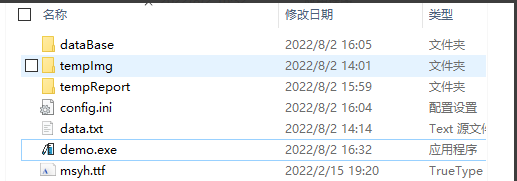
软件文件夹目录:
文件夹作用说明:
dataBase: 本地数据库,用来存放手臂的检测报告以及点位档案。
tempImg: 用于存放报告生成所用的图片
tempReport: 用于存放 临时报告
config.ini: 用于存放软件设定的配置
data.txt: 数据点位
文件夹作用说明:
dataBase: 本地数据库,用来存放手臂的检测报告以及点位档案。
tempImg: 用于存放报告生成所用的图片
tempReport: 用于存放 临时报告
config.ini: 用于存放软件设定的配置
data.txt: 数据点位
软件配置:
打开到软件配置界面:

点击读取配置:
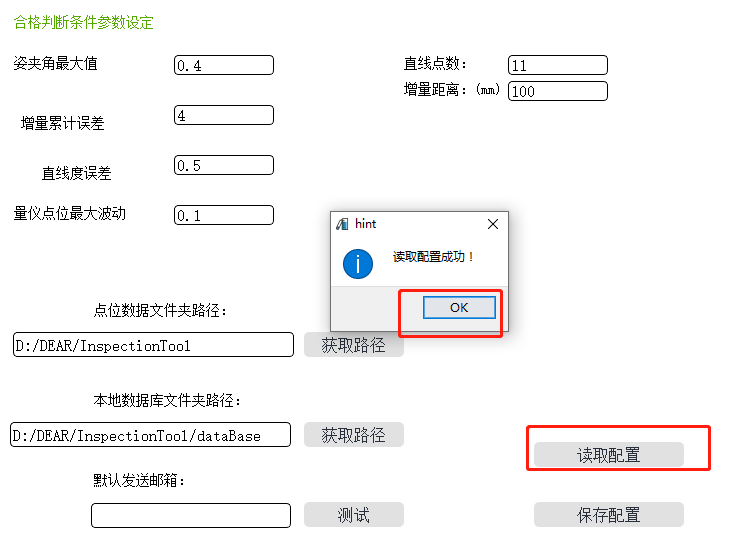
按照提示修改配置,如修改data.txt 默认的路径,以及数据库的文件夹,然后保存
精度检验
选择数据有两个方法:
1、默认路径与默认文件名
2、自己选档案
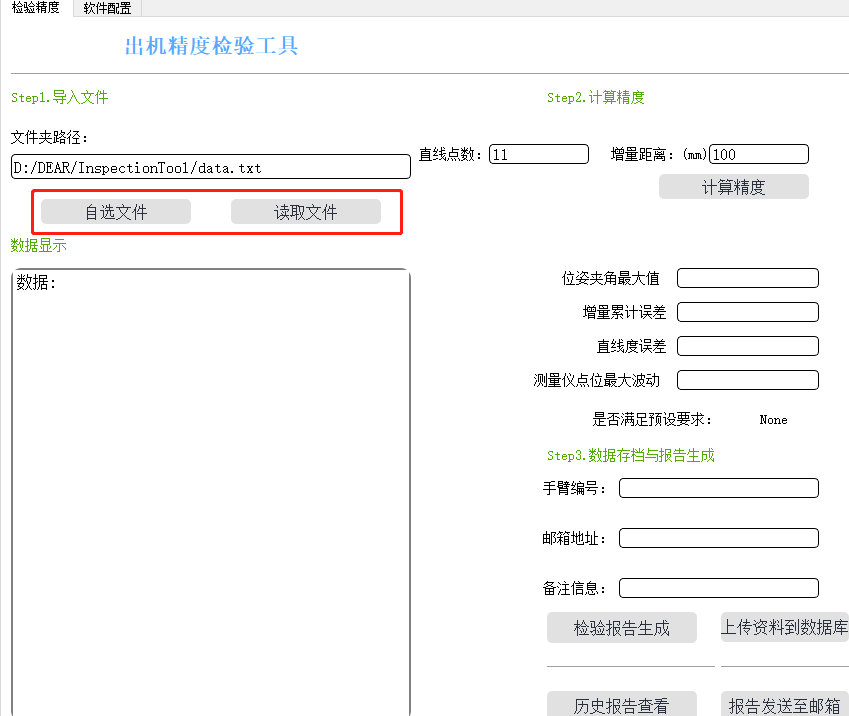
选择档案后既可以开始计算精度,计算前确保直线点数与增量距离是正确的
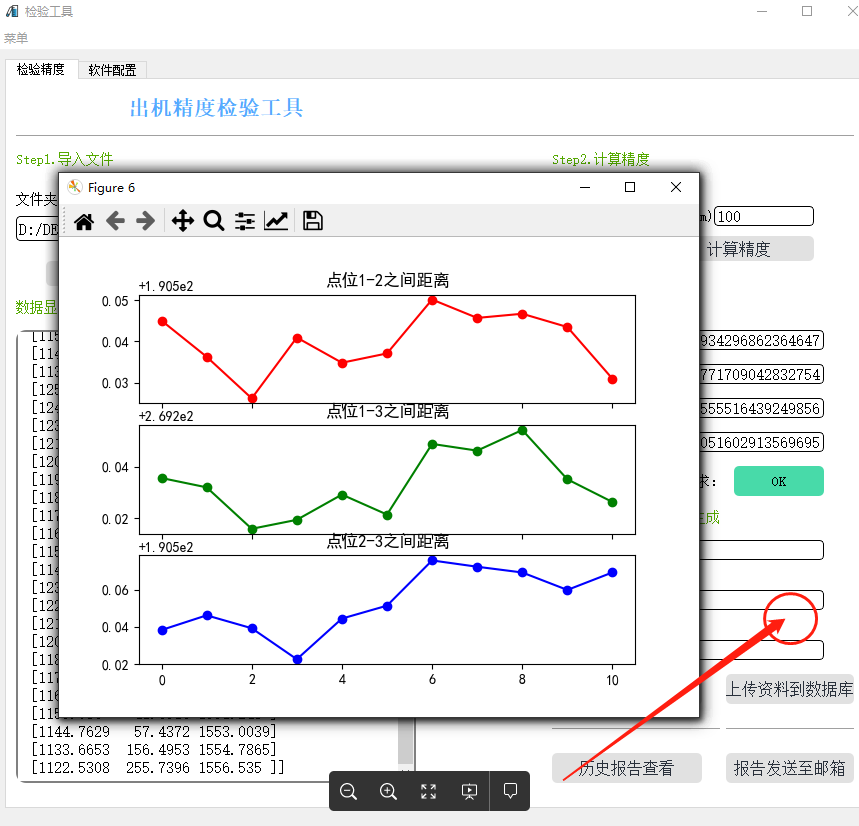
计算结束,如果不想查看图像,可以直接点击主界面
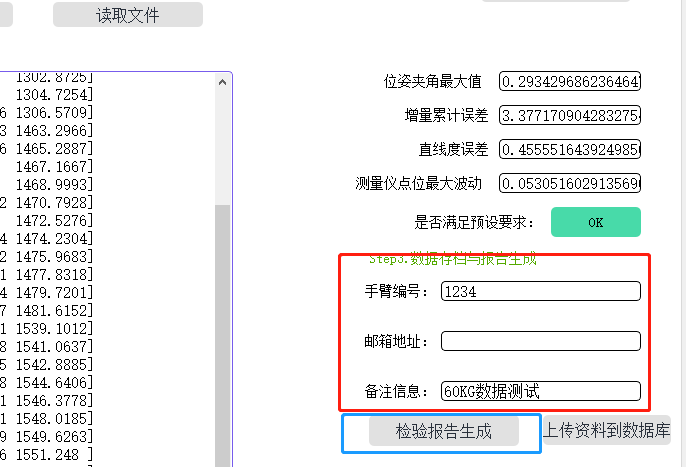
填写手臂编号,以及备注信息,然后点击生成报告
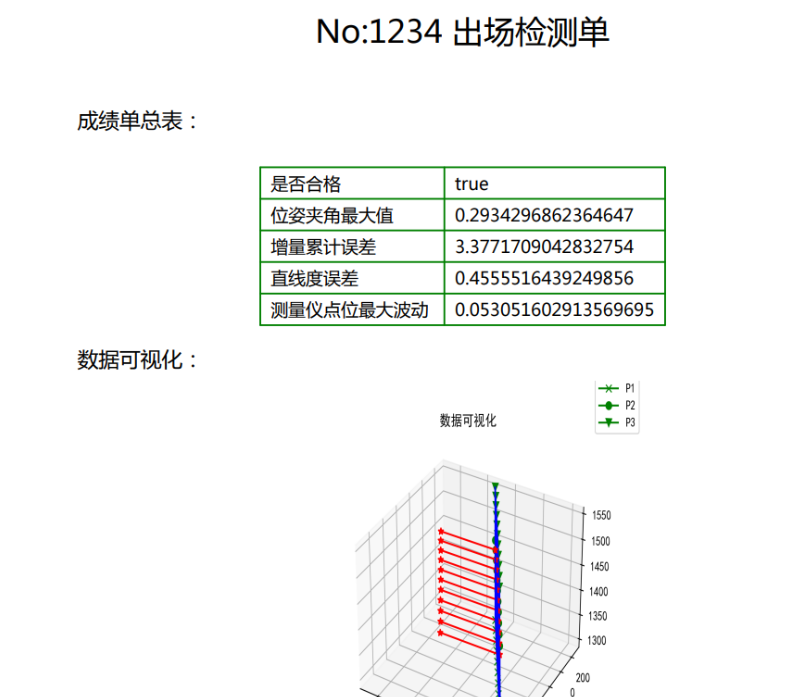
报告生成成功后,会显示如下PDF 文件供参考
如果需要存档,请点击上传到数据库,以备后期查看
后期查看时,可以输入手臂编号,然后点击历史报告查看进行相关档案的查看


 浙公网安备 33010602011771号
浙公网安备 33010602011771号