


MPU6050
MPU6050: Pitch,Roll,Yaw旋转方向遵循右手定则
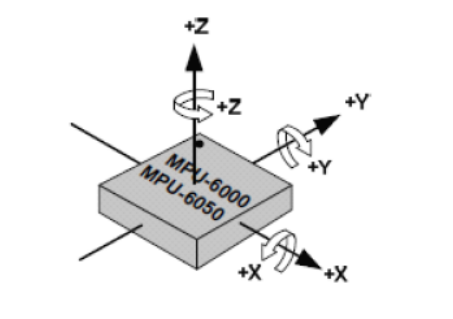
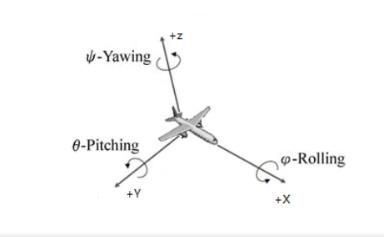
pith角 –绕Y轴(俯仰) 范围:±90° ,与旋转方向相反转是增大 -- 抬头为正,低头为负
roll角 –绕X轴(横滚) 范围:±180° ,与旋转方向相反转是增大 -- 右滚为正,左滚为负
yaw角 –绕z轴(偏航) 范围:±180° ,与旋转方向相反转是增大 --右偏为正,左偏为负
飞机与MPU6050姿态角的关系:
DMP:输出四个数(四元数),经公式转换后得到姿态角pith ,roll,yaw。
(1)使用DMP可以减小主控运算负担,得到的数据不需要滤波 (自己已经进行数据处理)
(2)原始数据—互补滤波—融合算法

posted on 2019-01-17 10:15 Darren_pty 阅读(2679) 评论(0) 编辑 收藏 举报

【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 开发者必知的日志记录最佳实践
· SQL Server 2025 AI相关能力初探
· Linux系列:如何用 C#调用 C方法造成内存泄露
· AI与.NET技术实操系列(二):开始使用ML.NET
· 记一次.NET内存居高不下排查解决与启示
· 阿里最新开源QwQ-32B,效果媲美deepseek-r1满血版,部署成本又又又降低了!
· 开源Multi-agent AI智能体框架aevatar.ai,欢迎大家贡献代码
· Manus重磅发布:全球首款通用AI代理技术深度解析与实战指南
· 被坑几百块钱后,我竟然真的恢复了删除的微信聊天记录!
· AI技术革命,工作效率10个最佳AI工具