
《k8s-1.13版本源码分析》-调度优选
写在前面:本文已过时,请移步 Daniel Hu's Blog 查看最新文章;欢迎关注公众号:“胡说云原生” 接收新文章更新通知!
源码分析系列文章已经开源到github,地址如下:
- github:https://github.com/farmer-hutao/k8s-source-code-analysis
- gitbook:https://farmer-hutao.github.io/k8s-source-code-analysis
本文大纲
- 走近priority过程
- PrioritizeNodes整体流程
- Results
- Old Priority Function
- Map-Reduce
- Combine Scores
- Fun和Map-Reduce实例分析
- InterPodAffinityPriority(Function)
- CalculateNodeAffinityPriorityMap(Map)
- CalculateNodeAffinityPriorityReduce(Reduce)
- 小结
1. 走近priority过程
pkg/scheduler/core/generic_scheduler.go:186
priorityList, err := PrioritizeNodes(pod, g.cachedNodeInfoMap, metaPrioritiesInterface, g.prioritizers, filteredNodes, g.extenders)
今天的分析从这行代码开始。
PrioritizeNodes要做的事情是给已经通过predicate的nodes赋上一个分值,从而抉出一个最优node用于运行当前pod. 第一次看priority可能会一脸蒙,和predicate中的逻辑不太一样;大伙得耐下性子多思考,实在有障碍也可以先不求甚解,整体过完后再二刷代码,再不行三刷,总会大彻大悟的!
从注释中可以找到关于PrioritizeNodes的原理(pkg/scheduler/core/generic_scheduler.go:624):
- PrioritizeNodes通过并发调用一个个priority函数来给node排优先级。每一个priority函数会给一个1-10之间的分值,0最低10最高。
- 每一个priority函数可以有自己的权重,单个函数返回的分值*权重后得到一个加权分值,最终所有的加权分值加在一起就是这个node的最终分值。
然后我们先函数签名入手:
pkg/scheduler/core/generic_scheduler.go:624
func PrioritizeNodes(
pod *v1.Pod,
nodeNameToInfo map[string]*schedulercache.NodeInfo,
meta interface{},
priorityConfigs []algorithm.PriorityConfig,
nodes []*v1.Node,
extenders []algorithm.SchedulerExtender,
) (schedulerapi.HostPriorityList, error)
形参定义和返回值:
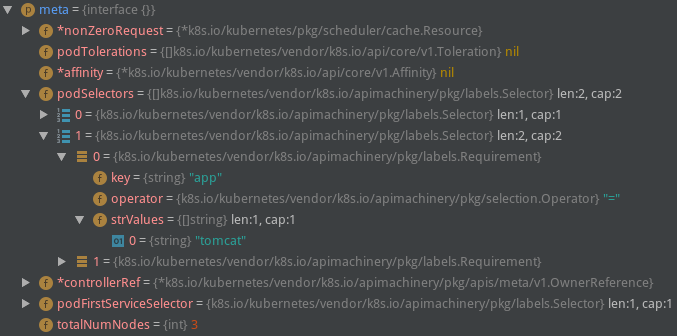
pod *v1.Pod*// pod就不用说了;*nodeNameToInfo map[string]*schedulercache.NodeInfo// 这个也不需要讲,字面意思代表一切;meta interface{}// 和predicate里的meta不太一样,下面会贴个debug的图先,具体后面再看;priorityConfigs []algorithm.PriorityConfig// 包含优选算法各种信息,比较重要;nodes []*v1.Node// node集合,不需要解释了;extenders []algorithm.SchedulerExtender// extender逻辑放到后面单独讲。
meta实参长这个样子:
返回值只需要看一下schedulerapi.HostPriorityList类型的含义了,这个类型之前也提过,后面频繁涉及到操作这个结构,所以这里再贴一次,大伙得烂熟于心才行!
pkg/scheduler/api/types.go:305
type HostPriority struct {
Host string
Score int
}
type HostPriorityList []HostPriority
着重分析一下这2个type,虽然很简单,还是有必要啰嗦一下,必须记在心里。HostPriority这个struct的属性是Host和Score,一个是string一个是int,所以很明显HostPriority所能够保存的信息是一个节点的名字和分值,再仔细一点说就是这个结构保存的是一个node在一个priority算法计算后所得到的结果;然后看HostPriorityList类型,这个类型是上一个类型的“集合”,集合表达的是一个node多个算法还是多个node一个算法呢?稍微思考一下可以知道HostPriorityList中存的是多个Host和Score的组合,所以HostPriorityList这个结构是要保存一个算法作用于所有node之后,得到的所有node的Score信息的。(这里我们先理解成一个算法的结果,作为函数返回值这里肯定是要保留所有算法作用后的最终node的Score,所以函数后半部分肯定有combine分值的步骤。)
2. PrioritizeNodes整体流程
前面说到PrioritizeNodes()函数也就是node优选的具体逻辑,这个函数略长,我们分段讲解。
2.1. Results
PrioritizeNodes()函数开头的逻辑很简单,我们先从第一行看到results定义的这一行。
pkg/scheduler/core/generic_scheduler.go:634
if len(priorityConfigs) == 0 && len(extenders) == 0 {
// 这个if很明显是处理特殊场景的,就是优选算法一个都没有配置(extenders同样没有配置)的时候怎么做;
// 这个result是要当作返回值的,HostPriorityList类型前面唠叨了很多了,大家得心里有数;
result := make(schedulerapi.HostPriorityList, 0, len(nodes))
for i := range nodes {
// 这一行代码是唯一的“逻辑了”,下面直到for结束都是简单代码;所以我们看一下EqualPriorityMap
// 函数的作用就行了。这里我不贴代码,这个函数很短,作用就是设置每个node的Score相同(都为1)
// hostPriority的类型也就是schedulerapi.HostPriority类型,再次强调这个类型是要烂熟于心的;
hostPriority, err := EqualPriorityMap(pod, meta, nodeNameToInfo[nodes[i].Name])
if err != nil {
return nil, err
}
// 最终的result也就是设置了每个node的Score为1的schedulerapi.HostPriorityList类型数据;
result = append(result, hostPriority)
}
return result, nil
}
// 这里只是简单定义3个变量,一把锁,一个并发等待相关的wg,一个错误集合errs;
var (
mu = sync.Mutex{}
wg = sync.WaitGroup{}
errs []error
)
// 这里定义了一个appendError小函数,逻辑很简单,并发场景下将错误信息收集到errs中;
appendError := func(err error) {
mu.Lock()
defer mu.Unlock()
errs = append(errs, err)
}
// 最后一个变量results也不难理解,类型是[]schedulerapi.HostPriorityList,这里需要注意这个类型
// 的作用,它保存的是所有算法作用所有node之后得到的结果集,相当于一个二维数组,每个格子是1个算法
// 作用于1个节点的结果,一行也就是1个算法作用于所有节点的结果;一行展成一个二维就是所有算法作用于所有节点;
results := make([]schedulerapi.HostPriorityList, len(priorityConfigs), len(priorityConfigs))
到这里要求大家心中能够想象上面提到的results是什么样的,可以借助纸笔画一画。下面的代码会往这个二维结构里面存储数据。
2.2. Old Priority Function
我们既然讲到“老式”,后面肯定有对应的“新式”。虽然这种函数已经DEPRECATED了,不过对于我们学习掌握优选流程还是很有帮助的。默认的优选算法里其实也只有1个是这在old形式的了:
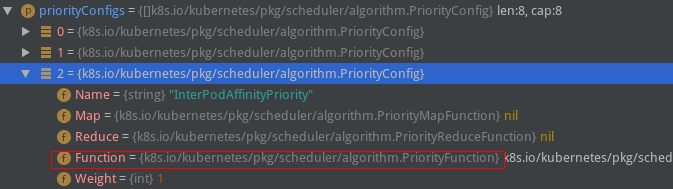
贴这块代码之前我们先关注一下多次出现的priorityConfigs这个变量的类型:
函数形参中有写到:priorityConfigs []algorithm.PriorityConfig,所以我们直接看PriorityConfig是什么类型:
pkg/scheduler/algorithm/types.go:62
// PriorityConfig is a config used for a priority function.
type PriorityConfig struct {
Name string
Map PriorityMapFunction
Reduce PriorityReduceFunction
// TODO: Remove it after migrating all functions to
// Map-Reduce pattern.
Function PriorityFunction
Weight int
}
PriorityConfig中有一个Name,一个Weight,很好猜到意思,名字和权重嘛。剩下的Map、Reduce和Function目测代表的就是优选函数的新旧两种表达方式了。我们先看旧的Function属性的类型PriorityFunction是什么:
pkg/scheduler/algorithm/types.go:59
type PriorityFunction func(pod *v1.Pod, nodeNameToInfo map[string]*schedulercache.NodeInfo, nodes []*v1.Node) (schedulerapi.HostPriorityList, error)
很明显这个类型代表了一个priority函数,入参是pod、nodeNameToInfo和nodes,返回值是HostPriorityList,也就是我们前面提到的1个priority函数作用于每个node后得到了Score信息,存结果的结构就是这个HostPriorityList;看起来很和谐~
然后讲回PrioritizeNodes过程:
pkg/scheduler/core/generic_scheduler.go:661
for i := range priorityConfigs {
// 如果第i个优选配置(priorityConfig)定义了老函数,则调用之;
if priorityConfigs[i].Function != nil {
wg.Add(1)
// 注意这里的参数index,这里传入的实参是上面的i;
go func(index int) {
defer wg.Done()
var err error
// 所以这里的results[index]就好理解了;后面priorityConfigs[index]的索引也是index,
// 这里表达的是第N个优选配置里有Function,那么这个Function的计算结果保存在
// results的第N个格子里;
results[index], err = priorityConfigs[index].Function(pod, nodeNameToInfo, nodes)
if err != nil {
appendError(err)
}
}(i)
} else {
// 如果没有定义Function,其实也就是使用了Map-Reduce方式的,这里先存个空的结构占位;
results[i] = make(schedulerapi.HostPriorityList, len(nodes))
}
}
上面这段代码逻辑还算好理解,唯一有点小绕的还是前面强调的HostPriorityList相关类型的操作上。
2.3. Map-Reduce
关于map-reduce思想我就不在这里赘述了,大数据行业很流行的一个词汇,百度一下(如果你能够google,自然更好咯)可以找到一大堆介绍的文章。
简单说map-reduce就是:Map是映射,Reduce是归约;map是统计一本书中的一页出现了多少次k8s这个词,reduce是将这些map结果汇总在一起得到最终结果。(map一般都是将一个算法作用于一堆数据集的每一个元素,得到一个结果集,reduce有各种形式,可以是累加这些结果,或者是对这个结果集做其他复杂的f(x)操作。
看看在Scheduler里面是怎么用Map-Reduce的吧:
// 这个并发逻辑之前介绍过了,我们直接看ParallelizeUntil的最后一个参数就行,这里直接写了一个匿名函数;
workqueue.ParallelizeUntil(context.TODO(), 16, len(nodes), func(index int) {
// 这里的index是[0,len(nodes)-1],相当于遍历所有的nodes;
nodeInfo := nodeNameToInfo[nodes[index].Name]
// 这个for循环遍历的是所有的优选配置,如果有老Fun就跳过,新逻辑就继续;
for i := range priorityConfigs {
if priorityConfigs[i].Function != nil {
// 因为前面old已经运行过了
continue
}
var err error
// 这里的i和前面老Fun的互补,老Fun中没有赋值的results中的元素就在这里赋值了;
// 注意到这里调用了一个Map函数就直接赋值给了results[i][index],这里的index是第一行这个
// 匿名函数的形参,通过ParallelizeUntil这个并发实现所有node对应一个优选算法的分值计算;
results[i][index], err = priorityConfigs[i].Map(pod, meta, nodeInfo)
if err != nil {
appendError(err)
results[i][index].Host = nodes[index].Name
}
}
})
for i := range priorityConfigs {
// 没有定义Reduce函数就不处理;
if priorityConfigs[i].Reduce == nil {
continue
}
wg.Add(1)
go func(index int) {
defer wg.Done()
// 调用Reduce函数
if err := priorityConfigs[index].Reduce(pod, meta, nodeNameToInfo, results[index]); err != nil {
appendError(err)
}
if klog.V(10) {
for _, hostPriority := range results[index] {
klog.Infof("%v -> %v: %v, Score: (%d)", util.GetPodFullName(pod), hostPriority.Host, priorityConfigs[index].Name, hostPriority.Score)
}
}
}(i)
}
// Wait for all computations to be finished.
wg.Wait()
if len(errs) != 0 {
return schedulerapi.HostPriorityList{}, errors.NewAggregate(errs)
}
看到这里我们可以发现老Fun和Map的区别不大,都是优选函数的执行过程。那为什么会存在两种形式呢?我们看完PrioritizeNodes整体流程后通过具体的Fun和Map-Reduce实现来看二者的区别。
2.4. Combine Scores
这块的代码很简单,我们先抛开extender的逻辑,剩下的代码如下:
// Summarize all scores.
// 这个result和前面的results类似,result用于存储每个node的Score,到这里已经没有必要区分算法了;
result := make(schedulerapi.HostPriorityList, 0, len(nodes))
// 循环执行len(nodes)次
for i := range nodes {
// 先在result中塞满所有node的Name,Score初始化为0;
result = append(result, schedulerapi.HostPriority{Host: nodes[i].Name, Score: 0})
// 执行了多少个priorityConfig就有多少个Score,所以这里遍历len(priorityConfigs)次;
for j := range priorityConfigs {
// 每个算法对应第i个node的结果分值加权后累加;
result[i].Score += results[j][i].Score * priorityConfigs[j].Weight
}
}
return result, nil
这块逻辑很清晰,要将前面得到的二维结果results压缩成一维的加权分值集合result,最终返回这个result.
从这里我们还可以得到一个结论,不管是Fun还是Map-Reduce,处理的结果都是填充results这个二维结构,所以Map-Reduce也没有什么神秘的,下面通过具体的算法来看二者有何异同。
3. Fun和Map-Reduce实例分析
3.1. InterPodAffinityPriority(Function)
这个算法做的是Pod间亲和性优选,也就是亲和pod越多的节点分值越高,反亲和pod越多分值越低。
我们撇开具体的亲和性计算规则,从优选函数的形式上看一下这段代码的逻辑:
pkg/scheduler/algorithm/priorities/interpod_affinity.go:119
func (ipa *InterPodAffinity) CalculateInterPodAffinityPriority(pod *v1.Pod, nodeNameToInfo map[string]*schedulercache.NodeInfo, nodes []*v1.Node) (schedulerapi.HostPriorityList, error) {
affinity := pod.Spec.Affinity
// 是否有亲和性约束;
hasAffinityConstraints := affinity != nil && affinity.PodAffinity != nil
// 是否有反亲和性约束;
hasAntiAffinityConstraints := affinity != nil && affinity.PodAntiAffinity != nil
// 这里有一段根据亲和性和反亲和性来计算一个node上匹配的pod数量的逻辑,我们先跳过这些逻辑,从优选算法实现的角度看这个算法的架子;
// 当遍历完所有的node之后,可以得到1个最高分和1个最低分,分别记为maxCount和minCount;
for _, node := range nodes {
if pm.counts[node.Name] > maxCount {
maxCount = pm.counts[node.Name]
}
if pm.counts[node.Name] < minCount {
minCount = pm.counts[node.Name]
}
}
// 这个result类型和前面看到的一样,都是存储单个算法的计算结果的;
result := make(schedulerapi.HostPriorityList, 0, len(nodes))
for _, node := range nodes {
fScore := float64(0)
// 如果分差大于0,也就是说不是所有的node都一样的情况,需要对分值做一个处理;
if (maxCount - minCount) > 0 {
// MaxPriority定义的是优选最高分10,第二个因数是当前node的count-最小count,
// 然后除以(maxCount - minCount);举个例子,当前node的计算结果是5,最大count是20,最小
// count是-3,那么这里就是10*[5-(-3)/20-(-3)]
// 这个计算的结果显然会在[0-10]之间;
fScore = float64(schedulerapi.MaxPriority) * ((pm.counts[node.Name] - minCount) / (maxCount - minCount))
}
// 如果分差不大于0,这时候int(fScore)也就是0,对于各个node的结果都是0;
result = append(result, schedulerapi.HostPriority{Host: node.Name, Score: int(fScore)})
}
return result, nil
}
如上,我们可以发现最终这个函数计算出了每个node的分值,这个分值在[0-10]之间。所以说到底Function做的事情就是根据一定的规则给每个node赋一个分值,这个分值要求在[0-10]之间,然后把这个HostPriorityList返回就行。
3.2. CalculateNodeAffinityPriorityMap(Map)
这个算法和上一个类似,上一个是Pod的Affinity,这个是Node的Affinity;我们来看代码:
pkg/scheduler/algorithm/priorities/node_affinity.go:34
func CalculateNodeAffinityPriorityMap(pod *v1.Pod, meta interface{}, nodeInfo *schedulercache.NodeInfo) (schedulerapi.HostPriority, error) {
node := nodeInfo.Node()
if node == nil {
return schedulerapi.HostPriority{}, fmt.Errorf("node not found")
}
// default is the podspec.
affinity := pod.Spec.Affinity
if priorityMeta, ok := meta.(*priorityMetadata); ok {
// We were able to parse metadata, use affinity from there.
affinity = priorityMeta.affinity
}
var count int32
if affinity != nil && affinity.NodeAffinity != nil && affinity.NodeAffinity.PreferredDuringSchedulingIgnoredDuringExecution != nil {
// Match PreferredDuringSchedulingIgnoredDuringExecution term by term.
for i := range affinity.NodeAffinity.PreferredDuringSchedulingIgnoredDuringExecution {
preferredSchedulingTerm := &affinity.NodeAffinity.PreferredDuringSchedulingIgnoredDuringExecution[i]
if preferredSchedulingTerm.Weight == 0 {
continue
}
nodeSelector, err := v1helper.NodeSelectorRequirementsAsSelector(preferredSchedulingTerm.Preference.MatchExpressions)
if err != nil {
return schedulerapi.HostPriority{}, err
}
if nodeSelector.Matches(labels.Set(node.Labels)) {
count += preferredSchedulingTerm.Weight
}
}
}
return schedulerapi.HostPriority{
Host: node.Name,
Score: int(count),
}, nil
}
撇开具体的亲和性计算细节,我们可以发现这个的count没有特定的规则,可能会加到10以上;另外这里的返回值是HostPriority类型,前面的Function返回了HostPriorityList类型。
map函数
pkg/scheduler/algorithm/priorities/selector_spreading.go:221
func (s *ServiceAntiAffinity) CalculateAntiAffinityPriorityMap(pod *v1.Pod, meta interface{}, nodeInfo *schedulercache.NodeInfo) (schedulerapi.HostPriority, error) {
var firstServiceSelector labels.Selector
node := nodeInfo.Node()
if node == nil {
return schedulerapi.HostPriority{}, fmt.Errorf("node not found")
}
priorityMeta, ok := meta.(*priorityMetadata)
if ok {
firstServiceSelector = priorityMeta.podFirstServiceSelector
} else {
firstServiceSelector = getFirstServiceSelector(pod, s.serviceLister)
}
// 查找给定node在给定namespace下符合selector的pod,返回值是[]*v1.Pod
matchedPodsOfNode := filteredPod(pod.Namespace, firstServiceSelector, nodeInfo)
return schedulerapi.HostPriority{
Host: node.Name,
// 返回值中Score设置成上面找到的pod的数量
Score: int(len(matchedPodsOfNode)),
}, nil
}
这个函数比较短,可以看到在指定node上查询到匹配selector的pod越多,分值就越高。假设找到了20个,那么这里的分值就是20;假设找到的是2,那这里的分值就是2.
3.3. CalculateNodeAffinityPriorityReduce(Reduce)
和上面这个Map对应的Reduce函数其实没有单独实现,通过NormalizeReduce函数做了一个通用的Reduce处理:
pkg/scheduler/algorithm/priorities/node_affinity.go:77
var CalculateNodeAffinityPriorityReduce = NormalizeReduce(schedulerapi.MaxPriority, false)
pkg/scheduler/algorithm/priorities/reduce.go:29
func NormalizeReduce(maxPriority int, reverse bool) algorithm.PriorityReduceFunction {
return func(
_ *v1.Pod,
_ interface{},
_ map[string]*schedulercache.NodeInfo,
// 注意到这个result是HostPriorityList,对应1个算法N个node的结果集
result schedulerapi.HostPriorityList) error {
var maxCount int
// 遍历result将最高的Score赋值给maxCount;
for i := range result {
if result[i].Score > maxCount {
maxCount = result[i].Score
}
}
if maxCount == 0 {
if reverse {
for i := range result {
result[i].Score = maxPriority
}
}
return nil
}
for i := range result {
score := result[i].Score
// 举个例子:10*(5/20)
score = maxPriority * score / maxCount
if reverse {
// 如果score是3,得到7;如果score是4,得到6,结果反转;
score = maxPriority - score
}
result[i].Score = score
}
return nil
}
}
3.4. 小结
- Function:一个算法一次性计算出所有node的Score,这个Score的范围是规定的[0-10];
- Map-Reduce:一个Map算法计算1个node的Score,这个Score可以灵活处理,可能是20,可能是-3;Map过程并发进行;最终得到的结果result通过Reduce归约,将这个算法对应的所有node的分值归约为[0-10];
本节有几张图是goland debug的截图,我们目前还没有提到如何debug;不过本节内容的阅读基本是不影响的。下一节源码分析内容发出来前我会在“环境准备”这一章中增加如何开始debug的内容,大家可以选择开始debug的时机。

