
Yolo车辆检测+LaneNet车道检测
Yolo车辆检测+LaneNet车道检测
源代码:https://github.com/Dalaska/Driving-Scene-Understanding/blob/master/README.md
- object_detector:检测车辆等交通目标
- lane_detector:检测车道线
- 可视化:输出 bounding box及车道线
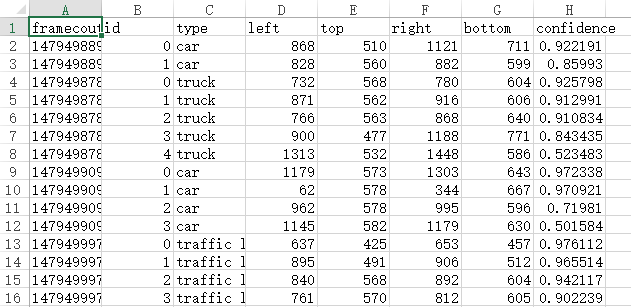
- 结果输出:检测obj_list输出到csv
1.用法
运行process_frame
2.Yolo交通目标检测
Yolo是通过opencv实现的
- 下载模块:代码是根据darnet yolov3修改的。 https://pjreddie.com/darknet/yolo/
- 下载pretrained weight: weight有400M, 不和代码一起托管了。把‘yolov3.weights’放在weight文件夹下。
3.LaneNet 车道线检测
参照这个例子写的:https://github.com/MaybeShewill-CV/lanenet-lane-detection
同样weight也要单独下载。下载完了放在这个目录下:/lanenet_label/model/tusimple_lanenet_vgg
4.车与车道线关系
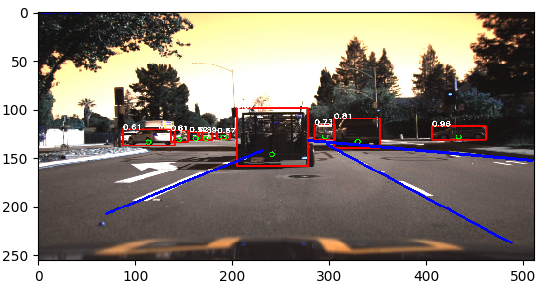
通过图像坐标中,目标和车道线方程判断车与车道线关系。选取车辆靠近底部3/4处为目标中心。
把中心点带入直线方程判断在目标是在自车道,左边车道,或右车道。
5.可视化与检测结果
目标检测可视化结果。
检测结果输入csv文件。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号