

hmm学习笔记(二)
学习hmm近一周的时间,做个总结。
参考 李航的《统计学习方法》第9章,第10章
本文包含:
1.hmm模型
2.前向后向算法
3.Baum-Welch算法
4.维特比算法
1.hmm模型
Q:所有可能的状态的集合(一般是指隐藏状态),N是指可能的状态数

V:所有可能的观测的集合,M是可能的观测数

I:长度为T的状态序列。(一般是指隐藏状态),T是时间

O:对应的观测序列。和I一样的时间T,表明一一对应。
A:状态转移概率矩阵
(A=[a_{ij}]_{N*N})
(a_{ij}=P(i_{t+1}=q_{j}|i_{t}=q_{i}),i=1,2,...,N;j=1,2,...,N)
aij是指时刻t处于状态qi的条件下在时刻t+1转移到状态qj的概率。(上一时刻状态i,转移到下一时刻状态j的概率)
B:观测概率矩阵
(B=[b_{j}(k)]_{N*M})
(b_{j}(k)=P(o_{t}=v_{k}|i_{t}=q_{j}),k=1,2,...,M;j=1,2,...,N)
bj(k)指在时刻t处于状态qj的条件下,生成观测为vk的概率。(状态为j,生成观测为k的概率)
pai:初始状态概率向量
(\pi =(\pi_{i}))
\pi_{i}=P(i_{1}=q_{i}),i=1,2,...,N
pai(i)时刻t=1处于状态qi的概率。(初始时刻的状态也是不确定的,也可能是各个状态的分布)
hmm模型参数:可由pai,A,B构成,pai和A决定状态序列,B决定观测序列。hmm模型用lambda表示:
(\lambda =(A,B,\pi ))
2.问题一:概率计算问题
给定hmm模型,和观测序列O,计算在模型lambda下观测序列O出现的概率
2.1前向算法
前向概率:给定hmm,定义到时刻 t 观测序列为 {o1,o2...ot},且状态为qi的概率。
(\alpha _{t}(i)=P(o_{1},o_{2},...,o_{t},i_{t}=q_{i}|\lambda ))
(已知观测序列o,t 时刻状态为 i 的前向概率 )
初值:

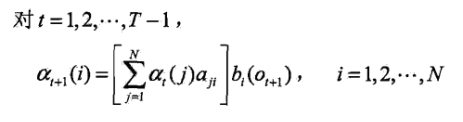
递归:
理解一下:
-
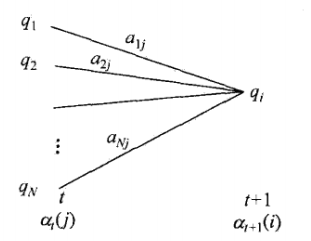
(\alpha _{t}(j)*a_{ji}) 时刻 t 观测到o1,o2...ot,并在 t 时刻处于状态 qj ,而在时刻t+1状态为 qi 的联合概率
-
(\sum_{j=1}^{N}\alpha _{t}(j)*a_{ji}) 对所有状态 qj 求和,时刻 t 观测到o1,o2...ot,并在时刻t+1状态为 qi 的联合概率,这一步可以认为是:到t+1状态为qi的前一时刻所有的概率之和。类似下面这个图。
-
(\sum_{j=1}^{N}\alpha _{t}(j)*a_{ji}*b_{i}(o_{t+1})) 时刻t+1观测到o1,o2...ot+1,且状态为qi ,对比前向概率的定义,可得出此结果即为
终止:
 T时刻,所有的状态都加起来(跟状态 i 无关了,也即跟隐藏状态无关了)
T时刻,所有的状态都加起来(跟状态 i 无关了,也即跟隐藏状态无关了)
2.2后向算法
后向概率:给定hmm,时刻 t,状态为qi 的条件下,从t+1到T的观测为{ot+1,...,oT}的概率
(\beta _{t}(i)=P(o_{t+1},o_{t+2},...,o_{T}|i_{t}=q_{i},\lambda ))
(时刻 t 状态为 i 的情况下,从t+1到T的观测到ot+1....oT的概率,叫后向概率)
初值:
递归:

欲求,可以先看其与
,下一时刻的关系
,时刻t+1状态为 j,从t+2到T的观测为ot+2...oT的概率。
比较一下这两个,就知道,只需要把 t+1 到 t+2 段的概率求出即可,t+2到T是重复的 ,即可用
表示
第一种理解:
上一时刻状态 i 转移到下一时刻 j 的概率
上一时刻状态 i ,下一时刻状态 j ,且在状态 j 的条件下,观测为 ot+1的联合概率,注意,这时候要结合
,这表示状态 j 观察到ot+2... oT的概率
上一时刻状态 i ,下一时刻状态 j ,且在状态 j 的条件下,观测到ot+1,ot+2...oT的概率
所有状态 j 相加,就跟 j 无关了,类似下面的图
上一时刻状态为 i ,下一时刻观测到ot+1,ot+2...oT的概率

对比一下定义即可得:
\beta _{t}(i)=\sum_{j=1}^{N}a_{ij}*b_{j}(o_{t+1})*\beta _{t+1}(j)
第二种理解:
状态为 j ,观测为ot+2,...,oT的概率
状态为 j ,观测为ot+1,ot+2...oT的概率
上一时刻状态为 i ,下一时刻状态为 j ,且在状态 j 下观测为ot+1,ot+2...oT的联合概率
为什么用 aij ? 因为要用来表示
,时间上来看是后一时刻的状态 j 表示前一时刻的状态 i ,但是前一时刻的状态 i 先发生,后一时刻的状态 j 后发生
这边就一样了,上一时刻状态为 i ,下一时刻观测到ot+1,ot+2...oT的概率
终止:
观察一下:
前向计算 T时刻,所有的状态的前向概率都加起来
在模型
下观测序列 {o1,o2...oT} 出现的概率,欲求
,前向是对
进行求和,可以推测后向应该是搞
时刻 t=1处于状态 i 的条件下,观测为o1的概率
时刻 t=1 状态为 i 观测为 {o2,o3...oT} 的概率
时刻 t=1 状态为 i 观测为 {o1,o2...oT} 的概率
求和,与状态 i 无关,观测为 {o1,o2...oT}的概率
即
前后向结合起来,可以写成一般形式:

计算概率和期望:
给定模型和观测O,在时刻 t 处于状态 qi 的概率:


给定模型和观测O,在时刻 t 处于状态 qi ,且在时刻 t+1 处于状态 qj 的概率:
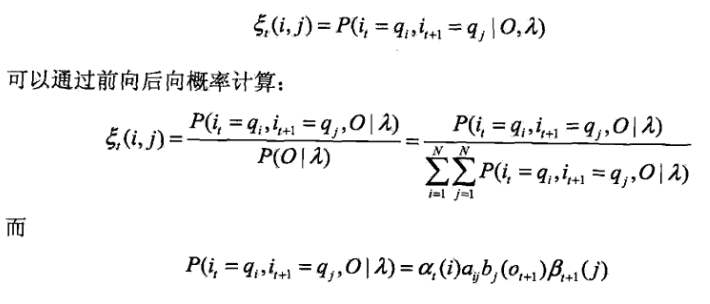
所以

后面部分的参考 隐马尔科夫模型 HMM(一)HMM 模型 ,讲的很细,还有配合的代码

 浙公网安备 33010602011771号
浙公网安备 33010602011771号