

Ubuntu16.04安装Kinetic版本ROS
0. 更换清华源
sudo gedit /etc/apt/sources.list
在清华镜像站中选择对应Ubuntu版本软件源配置文件写入sources.list:https://mirror.tuna.tsinghua.edu.cn/help/ubuntu/
sudo apt-get update
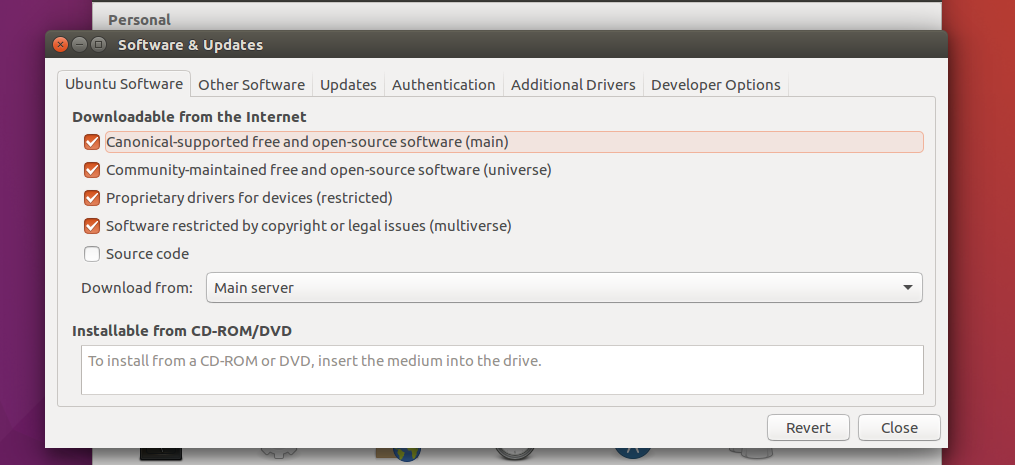
1. 配置Ubuntu软件库
System Setting --> Software Updates --> 勾选全部
2. 设置ros安装源
1)注意这里务必使用国内源,清华源相关使用帮助见网址:https://mirrors4.tuna.tsinghua.edu.cn/help/ros/
如果后面在下载过程中发现下载地址为 packages.ros.org/ros/ubuntu,非常慢,建议更换国内源
sudo sh -c '. /etc/lsb-release && echo "deb https://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ xenial main" > /etc/apt/sources.list.d/ros-latest.list'
2)信任ROS的GPG Key
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
3)更新索引
sudo apt update
3. 安装ROS
sudo apt-get install ros-kinetic-desktop-full
这个过程应该比较快,100M光纤大概5min下载完成,如果有问题,请查看前一步ros安装源设置是否为国内源
4. 初始化并更新rosdep
1)初始化rosdep
sudo rosdep init
如果这里出现报错

解决方法为:
sudo gedit /etc/hosts
在末尾添加以下内容,确保 151.101.76.133 是可以 ping 通的一个IP。具体原因及IP查找方式参考 https://blog.csdn.net/weixin_45462252/article/details/106680587
151.101.76.133 raw.githubusercontent.com
如果出现其他报错情况,参考https://ismango.blog.csdn.net/article/details/106049992 解决方案
2)rosdep更新
rosdep update
如果这里出现 time out 情况,参考 https://blog.csdn.net/weixin_45462252/article/details/106680587
5. 添加ros环境变量
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
6. 安装相关依赖
sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential
相关测试可搜索 turtlesim 测试内容。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号