
霍夫圆检测
opencv中相关API
CV_EXPORTS_W void HoughCircles( InputArray image, OutputArray circles,
int method, double dp, double minDist,
double param1 = 100, double param2 = 100,
int minRadius = 0, int maxRadius = 0 );
/** @brief Finds circles in a grayscale image using the Hough transform.
The function finds circles in a grayscale image using a modification of the Hough transform.
Example: :
@include snippets/imgproc_HoughLinesCircles.cpp
@note Usually the function detects the centers of circles well. However, it may fail to find correct
radii. You can assist to the function by specifying the radius range ( minRadius and maxRadius ) if
you know it. Or, you may set maxRadius to a negative number to return centers only without radius
search, and find the correct radius using an additional procedure.
@param image 8-bit, single-channel, grayscale input image.
@param circles Output vector of found circles. Each vector is encoded as 3 or 4 element
floating-point vector \f$(x, y, radius)\f$ or \f$(x, y, radius, votes)\f$ .
@param method Detection method, see #HoughModes. Currently, the only implemented method is #HOUGH_GRADIENT
@param dp Inverse ratio of the accumulator resolution to the image resolution. For example, if
dp=1 , the accumulator has the same resolution as the input image. If dp=2 , the accumulator has
half as big width and height.
@param minDist Minimum distance between the centers of the detected circles. If the parameter is
too small, multiple neighbor circles may be falsely detected in addition to a true one. If it is
too large, some circles may be missed.
@param param1 First method-specific parameter. In case of #HOUGH_GRADIENT , it is the higher
threshold of the two passed to the Canny edge detector (the lower one is twice smaller).
@param param2 Second method-specific parameter. In case of #HOUGH_GRADIENT , it is the
accumulator threshold for the circle centers at the detection stage. The smaller it is, the more
false circles may be detected. Circles, corresponding to the larger accumulator values, will be
returned first.
@param minRadius Minimum circle radius.
@param maxRadius Maximum circle radius. If <= 0, uses the maximum image dimension. If < 0, returns
centers without finding the radius.
@sa fitEllipse, minEnclosingCircle
*/
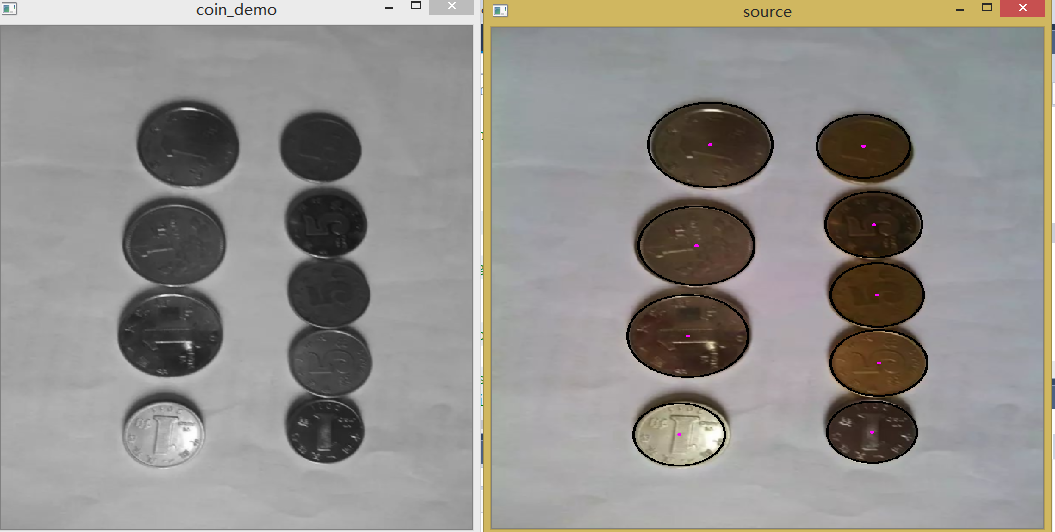
实验效果:
示例代码地址:https://github.com/cyssmile/openCV_learning_notes/blob/master/opencv_test/opencv_034/opencv_034.cpp

 浙公网安备 33010602011771号
浙公网安备 33010602011771号