**
机械臂轨迹规划
**
机械手轨迹规划是要使得机械手从起始状态移动到某个规定的目标状态。有时还需指明中间点。可以通过建立运动学模型,得到运动学正解和逆解,从而就on告知轨迹。机械臂的运动应当平稳,因此描述运动的轨迹的函数必须连续,且一阶导数(速度),二阶导数(加速度)有时也应该连续。
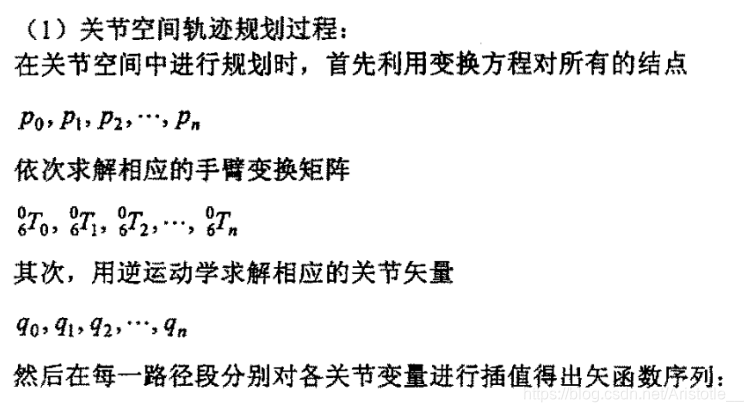
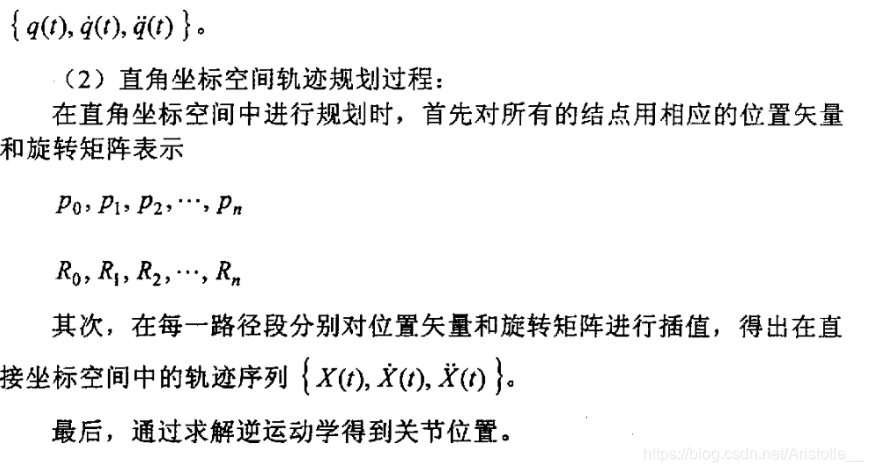
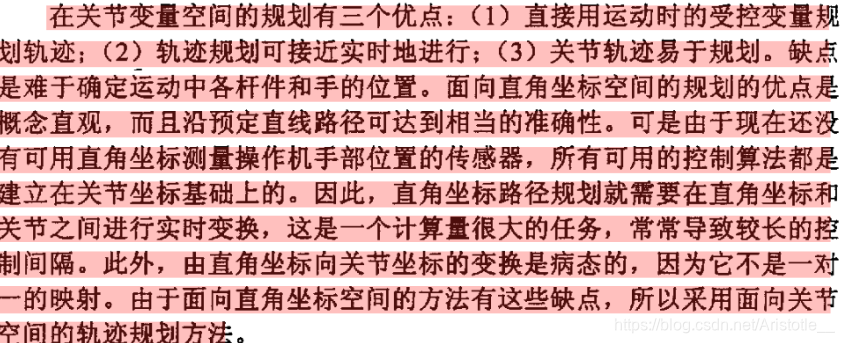
轨迹规划可以在关节空间中进行,或者直角坐标中进行。在关节空间中进行轨迹规划是指将关节变量表示为时间的函数,用此矢函数及其一阶二阶导数描述操作臂预期的运动。在直角坐标中进行轨迹规划是指将手部位姿表示为实践的函数,而相应的关节位置由手部姿态反解得出、
![在这里插入图片描述]()
![在这里插入图片描述]()
![在这里插入图片描述]()

 浙公网安备 33010602011771号
浙公网安备 33010602011771号