强化学习的数学原理-01基本概念
state:\(The \quad status \quad of \quad agent \quad with \quad respect \quad
to \quad the \quad environment\) (agent 相对于环境的状态)
对于下面的网格地图来说:\(state\)就相当于$ location $,用 \(s_1、s_2、...、s_9\)来表示

state space:\(The \quad set \quad of \quad all \quad state \quad S = \{s_i\}_{i=1}^{9}\) 状态空间,把所有\(state\)放在一起得到的集合就是\(state \quad space\)
Action: \(For \quad each \quad state, \quad there \quad are \quad five \quad possible \quad actoin: a_1、a_2、a_3、a_4、a_5\)

Action space of a state:\(the \quad set \quad of \quad all possible actions \quad of \quad a \ quad state\)
\(A(s_i) = \{a_i\}_{i=1}^{5}\)
state transition: 当采取了一个\(action\)后,\(agent\)从一个\(state\)转移到另一个\(state\),这样一个过程佳作\(state \quad transition\)

\(state \quad transition\)定义一种\(agent\)和\(environment\)交互的行为
Forbidden area:有两种情况,一种是forbidden are可以到达,但是会得到相应的惩罚,另一种是forbidden area不可到达,相当于有一堵墙。
Tabular representation:可以用表格来描述state transition

只能能表示确定的情况
相比于上面的表格,更一般的做法是使用下面这种方法
state transition probability:使用概率来描述state transition
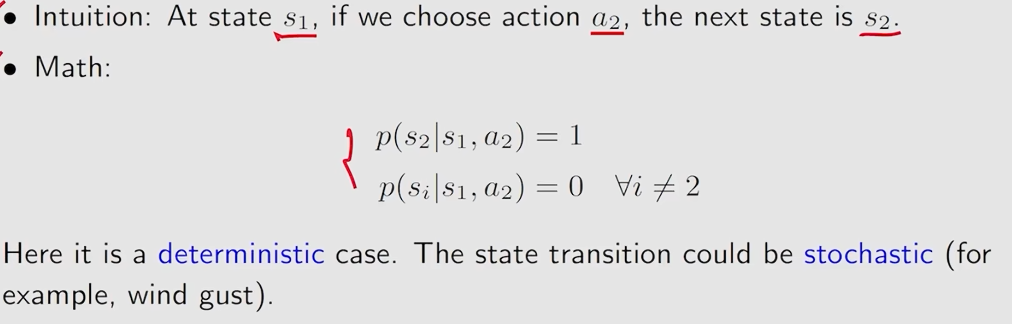
Policy:告诉agent在一个状态应该采取什么动作


\(\pi\)在强化学习中用来表示条件概率,而不是圆周率
上面图片中的情况是确定性的策略,同时也有不确定的策略

Reward:reward是action采取一个action后得到的实数,一个正的reward代表鼓励采取这样的action,一个负的reward代表惩罚这样的action。
reward可以理解成一个\(human-machine \quad interface\),我们人类和机器交互的一个接口
reward依赖于当前的\(state和采取的action\)而不是依赖于接下来的\(state\)
trajectory:是一个\(state-action-reward\) chain


Return:沿着trajectory,所有的reward相加得到得就是return
return的作用可以用来评估一个策略的好坏
discount return:

从上图可以看到上面的trajectory是无限长的,对应的return是发散的。
为了解决这个问题引入一个\(discount \quad rate \quad \gamma \in [0, 1)\)
上面的return就可以用discount return来表示
$discount return = 0 + \gamma * 0 + {\gamma^2} * 0 + {\gamma^3} * 1 + {\gamma^4} * 1 + ... $
\(discount return = \gamma^3(1 + \gamma + \gamma^2 + \gamma^3 + ...)\)
\(discount return = \gamma^3(\frac{1}{1 - \gamma})\)
episode\trial:一个有限步的trajectory被称为episode,也就是有terminal states的trajectory。
可以采用方法将episodic转化为continue的,在terminal state时无论采取什么action都会回到terminal state。
MDP:Markov decision process,马尔可夫决策过程是一个框架framework
一个马尔可夫决策过程中有很多关键的元素:
set:
- State:
- Action
- Reward
Probability distribution:
- State transition probability:在一个状态s,采取action a,转移到状态\(s^{'}\)的概率\(p(s^{'}|s,a)\)
- Reward probability:在状态s,采取action a,得到reward r的概率\(p(r|s, a)\)
Policy:
在状态s,采取action a的概率\(\pi(a|s)\)
Markov property:memoryless property


 浙公网安备 33010602011771号
浙公网安备 33010602011771号