
Environment Perception and Motion Strategy for Transformable Legged Wheel Robot on rough terrains
论文发表于2018年。这篇论文介绍了三模式机器人在野外环境下的环境感知和模式切换策略。机器人拥有arc mode、round mode 、claw mode三种模式。图a表示由round mode 变换至arc mode,图b 表示由arc mode 变换为 claw mode。

1.感知
1.1 周围环境感知。分为环境建模和障碍物感知两部分
环境建模采用的传感器为双目相机。处理器接收到图像信息之后,①对图像进行矫正;②得出周围环境的视察图;③利用视察图对周围环境进行三维重建。
障碍物感知采用的传感器为超声波雷达,型号为HC-SR04。
1.2 车身状态感知。分为电流检测和自车位姿检测两部分.。
电流检测:检测电流,以防止电流长时间较大,烧坏系统,传感器型号为ACST12。
车身位姿检测:主要用来感知自车的俯仰角,同时辅助判断出周围地形的坡度。传感器为IMU,处理算法为卡尔曼滤波。
2.模式切换策略
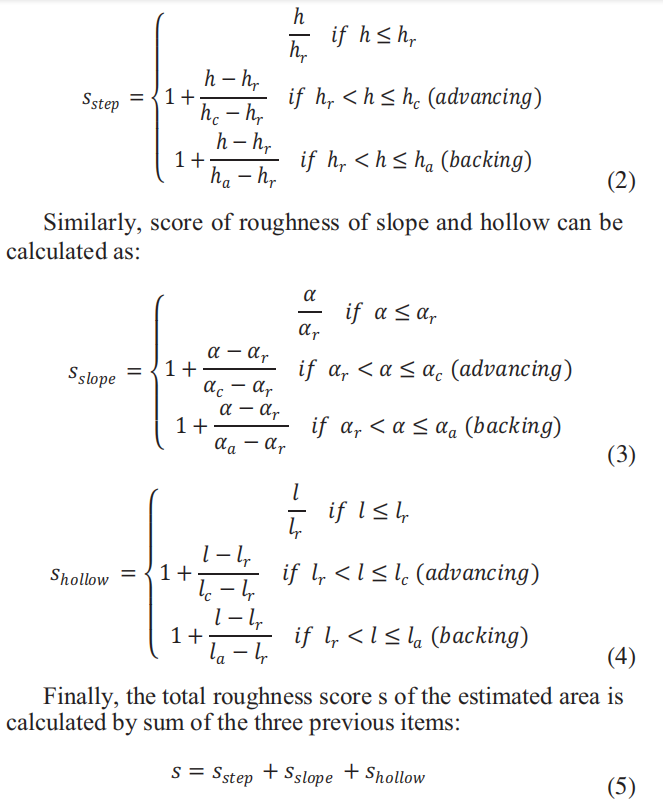
模式切换主要依据为地形的不平度。首先从简历的三维环境地图中提取出斜坡、台阶和空洞等特征,然后根据斜坡的坡度、台阶高度、空洞的尺寸计算出环境的不平度s,如s<1,采用round mode,如s>2则停止运行,如1<s<2,前进采用claw mode ,后退采用arc mode。不平度计算公式如下:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号