
Apollo planning模块 (一)
1.Navigation模式
参考文档:/apollo-3.5.0/docs/howto/how_to_use_apollo_2.5_navigation_mode_cn.md
高精地图制作难度大、需要特殊权限,因此为了使Apollo系统摆脱对高精地图的依赖,设置了Navigation模式。Navigation模式的基本思路如下:
记录人类驾驶员的行驶路径作为参考路径,在车辆行驶过程中通过感知模块生成实时的relative map来进行规划。
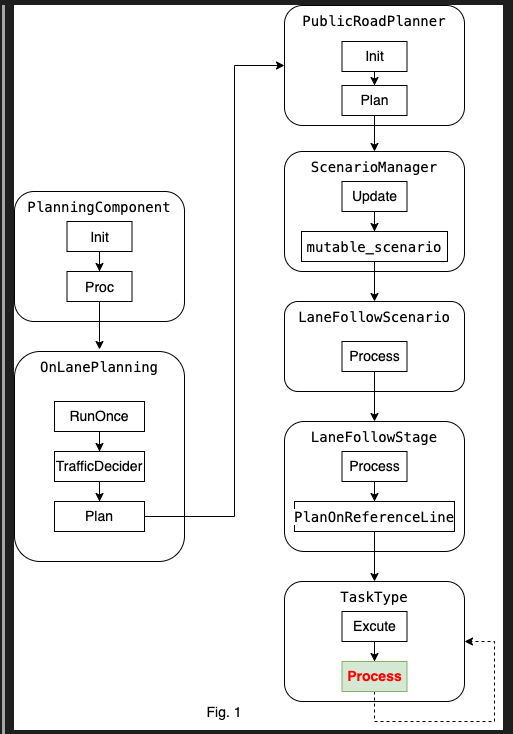
2.Apollo Planning模块的输入、输出、整体架构
输入信息:定位、感知、预测、高精地图、路由、任务管理模块
输出信息:控制模块可执行的顺滑无碰撞轨迹
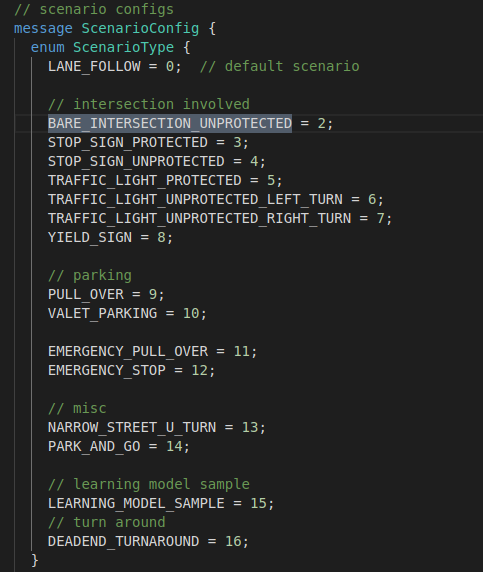
/apollo-7.0.0/modules/planning/proto/planning_config.proto:Apollo planning 模块将行驶场景分为如下16类。每种场景由若干个stage组成,stage又包含若干task。
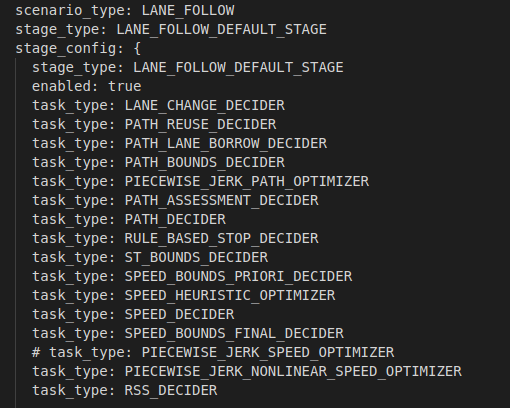
/apollo-7.0.0/modules/planning/conf/scenario/lane_follow_config.pb.txt: lane follow scenerio 的stage 和 task
/apollo-7.0.0/docs/technical_documents/tasks/path_bounds_decider_cn.md:规划任务的整体流程
3.navi_planning 和 on_lane_planning
planning_base有navi_planning和 on_lane_planning两个子类。在planning_component.h Init函数中确定使用哪个planning
if (FLAGS_use_navigation_mode) { planning_base_ = std::make_unique<NaviPlanning>(injector_); } else { planning_base_ = std::make_unique<OnLanePlanning>(injector_); }
4.ScenarioManager场景选择:/apollo-7.0.0/modules/planning/scenarios/scenario_manager.cc
Interception:拦截
pad message:外界输入信号?????
ScenarioConfig::ScenarioType ScenarioManager::ScenarioDispatchNonLearning( const Frame& frame) { //////////////////////////////////////// // default: LANE_FOLLOW ScenarioConfig::ScenarioType scenario_type = default_scenario_type_; //////////////////////////////////////// // Pad Msg scenario scenario_type = SelectPadMsgScenario(frame); const auto vehicle_state_provider = injector_->vehicle_state(); common::VehicleState vehicle_state = vehicle_state_provider->vehicle_state(); const common::PointENU& target_point = frame.local_view().routing->routing_request().dead_end_info().target_point(); const common::VehicleState& car_position = frame.vehicle_state(); if (scenario_type == default_scenario_type_) { // check current_scenario (not switchable) switch (current_scenario_->scenario_type()) { case ScenarioConfig::LANE_FOLLOW: case ScenarioConfig::PULL_OVER: break; case ScenarioConfig::BARE_INTERSECTION_UNPROTECTED: case ScenarioConfig::EMERGENCY_PULL_OVER: case ScenarioConfig::PARK_AND_GO: case ScenarioConfig::STOP_SIGN_PROTECTED: case ScenarioConfig::STOP_SIGN_UNPROTECTED: case ScenarioConfig::TRAFFIC_LIGHT_PROTECTED: case ScenarioConfig::TRAFFIC_LIGHT_UNPROTECTED_LEFT_TURN: case ScenarioConfig::TRAFFIC_LIGHT_UNPROTECTED_RIGHT_TURN: case ScenarioConfig::VALET_PARKING: case ScenarioConfig::DEADEND_TURNAROUND: // transfer dead_end to lane follow, should enhance transfer logic if (JudgeReachTargetPoint(car_position, target_point)) { scenario_type = ScenarioConfig::LANE_FOLLOW; reach_target_pose_ = true; } case ScenarioConfig::YIELD_SIGN: // must continue until finish if (current_scenario_->GetStatus() != Scenario::ScenarioStatus::STATUS_DONE) { scenario_type = current_scenario_->scenario_type(); } break; default: break; } } //////////////////////////////////////// // ParkAndGo / starting scenario if (scenario_type == default_scenario_type_) { if (FLAGS_enable_scenario_park_and_go && !reach_target_pose_) { scenario_type = SelectParkAndGoScenario(frame); } } //////////////////////////////////////// // intersection scenarios if (scenario_type == default_scenario_type_) { scenario_type = SelectInterceptionScenario(frame); } //////////////////////////////////////// // pull-over scenario if (scenario_type == default_scenario_type_) { if (FLAGS_enable_scenario_pull_over) { scenario_type = SelectPullOverScenario(frame); } } //////////////////////////////////////// // VALET_PARKING scenario if (scenario_type == default_scenario_type_) { scenario_type = SelectValetParkingScenario(frame); } //////////////////////////////////////// // dead end if (scenario_type == default_scenario_type_) { scenario_type = SelectDeadEndScenario(frame); } //////////////////////////////////////// return scenario_type; }
ScenarioConfig::ScenarioType ScenarioManager::SelectPadMsgScenario( const Frame& frame) { const auto& pad_msg_driving_action = frame.GetPadMsgDrivingAction(); switch (pad_msg_driving_action) { case DrivingAction::PULL_OVER: if (FLAGS_enable_scenario_emergency_pull_over) { return ScenarioConfig::EMERGENCY_PULL_OVER; } break; case DrivingAction::STOP: if (FLAGS_enable_scenario_emergency_stop) { return ScenarioConfig::EMERGENCY_STOP; } break; case DrivingAction::RESUME_CRUISE: if (current_scenario_->scenario_type() == ScenarioConfig::EMERGENCY_PULL_OVER || current_scenario_->scenario_type() == ScenarioConfig::EMERGENCY_STOP) { return ScenarioConfig::PARK_AND_GO; } break; default: break; } return default_scenario_type_; }
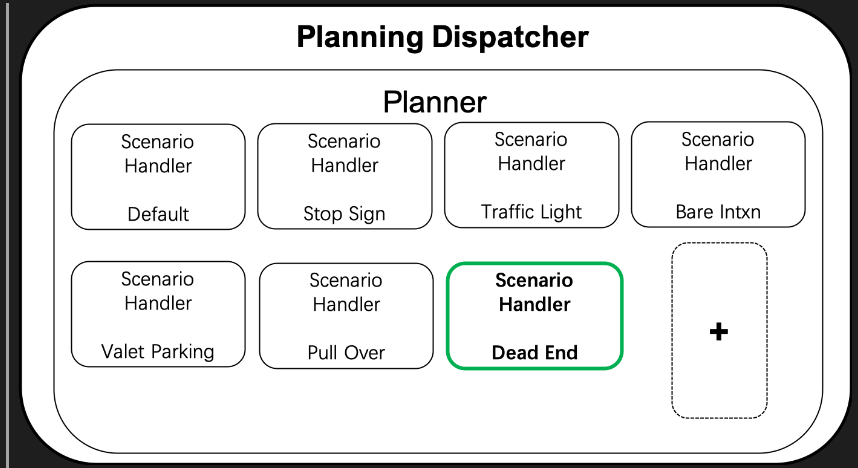
5.planner文件夹
planner类继承关系:
基类:Planner,派生类:PlannerWithReferenceLine
基类:PlannerWithReferenceLine,派生类:LatticePlanner,NaviPlanner,PublicRoadPlanner
planner_dispatcher类继承关系(采用Dispatcher设计模式!!!):
基类:PlannerDispatcher,派生类:NaviPlannerDispatcher,OnLanePlannerDispatcher

 浙公网安备 33010602011771号
浙公网安备 33010602011771号