
Carla 同步和异步模式
carla采用server--client模式,两者之间的时间有synchronous mode和asynchronous mode两种模式。synchronous mode.下,server等待client的时钟才进行下一帧仿真;asynchronous mode.不考虑client和server之间的同步,server以最快的速度进行下一帧仿真。在有传感器的时候,必须采用同步模式,否则无法保证处理的图像、点云等信息为时间同步
1.Synchrony and time-step。例如,执行算法A所耗费的时间为0.05s,算法A的在仿真中每隔0.1s执行一次,即real time-step=0.05s,simulation time-step=0.1s。执行一百次之后,仿真时间累计为simulation time=0.1*100=10s,而现实世界时间累计为 real time=0.05*100=5s。
real time:真实世界中经过的时间
simulation time-step:分为fixed time-step 和variable time-step两类,前者表示相邻两帧之间server的时间间隔是固定的,后者表示为可变的。
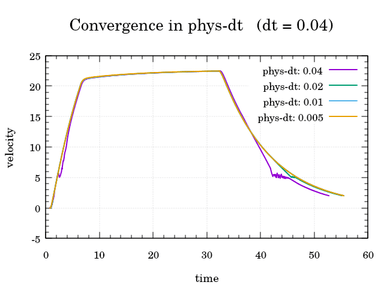
Physics substepping:物理世界的仿真为尽可能接近实际物理世界,仿真频率必须为高频。carla中要求Physics substepping不得超过0.01666,最好小于0.01,否则会引起失真

 浙公网安备 33010602011771号
浙公网安备 33010602011771号